現代倉儲的樣貌正在隨世界變化快速改變。電子商務、零售商、醫院和其他物流業者都將自主移動機器人(AMR)視為控制勞動力成本、提高運輸量和縮短交貨時間的關鍵技術。工廠老闆和經營者都想藉由AMR易於部署且能夠即時修改的特性快速導入。
相較於前一代無人搬運車(Automated Guided Vehicle, AGV),AMR可以在理解指令的同時,進行動態檢測和避開障礙物,在不同的工作環境中進行導航,而毋需在現有路徑上或依賴人工來控制其路徑。本文描述使用整合的軟硬體技術開發和部署AMR,包含工廠、智慧城市和醫院的實際應用案例。
倉儲需求加速帶動AGV轉向AMR
AMR市場正在蓬勃發展。2020年,其全球市場規模約為3.56億美元。據MarketWatch預測,2026年將增至10.11億美元,年複合成長率(CAGR)為15.9%。製造和物流業需要高輸送量、快速簡單的機器人部署以及靈活的生產線,隨著新興應用的出現,加速帶動AGV朝向AMR的市場。為了理解這個轉變,本文首先解釋兩種技術差異。
AGV/AMR差異
AGV能將原材料、半成品和成品運輸到製造生產線上/放到倉庫儲存/送到物流中心進行檢索。AGV使用軟體以及基於感測器的導引系統來引導其路徑。它們在運送貨品時安全可靠,因為它們遵循固定的路線進行移動,具有精確控制的加速/減速以及障礙物檢測緩衝器。
然而,AGV缺乏靈活彈性,如圖1所示,例如生產線布局發生變化,這就意謂著導航的軌道基礎設施需要重新進行路線規畫,這樣往往會牽涉到時間和相關成本的問題。當AGV偵測到障礙物時,它就會停止,直到有人移除障礙物。再加上車隊管理系統是集中式的,非點對點通訊,因此AGV無法進行人機互動。
 圖1 AGV和AMR之間的比較。
圖1 AGV和AMR之間的比較。
相較於AGV,AMR靈活彈性度高。若產線布局發生變化,同步定位與建圖(SLAM)可以讓機器人自行探索不熟悉的位置空間以便自動創建地圖,且毋需額外的人為操作或設定成本。
AMR可以使用一系列的感測器技術來動態檢測和閃避障礙物,包括人。這些機器人透過感測器和鏡頭檢測,結合即時通訊技術,實現人機協作。
ROS 2實現群體機器人自主化
機器人作業系統(Robot Operating System, ROS)是一個用於機器人軟體發展的開源框架,它既不是機器人也不是作業系統。ROS是由兩位史丹佛大學的博士Eric Berger和Keenan Wyrobek於2007年創建,他們期望即使是不熟悉機器人硬體相關知識的軟體開發人員,也能夠為機器人編寫軟體。
今天,ROS Classic(也稱作ROS 1)已經擁有豐富且穩定的開發套件、工具和課程,也涵蓋了用於開發不同機器人應用程式的硬體。ROS模組包含整合的感測器、導航、視覺化和運動規畫。
ROS 1最初開發只是為了學術用途,且須處於良好的通訊環境中。但是在現實世界中,通訊條件並非想像的那麼完美,尤其是在工業環境中,如頻寬、網路的可用性和通訊範圍,以及透過電池供電的移動機器人之收發器功耗,都大幅提高系統複雜度。此外,ROS 1僅適用於單一機器人,若想要工廠更加智慧,就需要多個且能相互協作的機器人。基於資料分散式服務(Data Distribution Service, DDS)的通訊架構,ROS 2透過群機自主的方式,讓車隊管理系統去中心化,讓AMR實現機器人相互間的即時溝通。
現代化的智慧工廠、倉庫和物流中心,工廠廠長往往希望能提高產能,他們需要高效且能夠執行其他任務的AMR,期望作業能夠快速且輕鬆地進行部署,這就意謂著需要AMR來快速升級營運,且毋需預先安裝任何基礎設施就能夠靈活地修改生產線、即時調整設置並執行任務。基於上述原因,雖然許多開發人員使用ROS 1進行AMR的原型設計,但最終仍需進化到ROS 2才能滿足其需求。
建構下一代基於ROS 2之AMR挑戰
AMR的未來是實現群機的自主化。群機自主移動機器人可以在幾乎沒有人為操作監督的情況下完成工作。為了實現這一目標,就必須從ROS 1進化到ROS 2。
但是進化到ROS 2具有一定的挑戰性,尤其是在開發和部署大量AMR時。對於已經使用ROS 1的開發人員來說,主要面臨三大挑戰:複雜性、可擴充性和可升級性。
AMR的設計比較複雜,想要建構一個機器人系統,開發人員需要選擇和購買運算平台、感測器、運動控制器等硬體,還要考慮機構設計、安裝軟體(作業系統、驅動和套裝軟體)。若開發人員對系統不熟悉,完成整個系統整合可能需要一個月的時間;若還需要即時溝通和專用的QoS等先進功能,開發人員就必須自行編寫程式。一旦開始建構機器人作為概念驗證時,可擴充性和部署就成為更大的挑戰。
ROS 1的建構本質並不適用於多個AMR之間的溝通,用ROS 1來開發AMR管理系統,會造成準確性、故障以及損壞的風險。營運者需要的並非昂貴的執行成本,而是大規模AMR部署,而且對ROS 1的支援,預計將在2025年終止(EOL),這就意謂著更多公司與開發人員,需要熟悉如何從ROS 1轉移至ROS 2的過程。
部署AMR注意事項
ROS 2將ROS 1從學術界帶入工業領域。ROS 2能透過多個機器人之間的協作以及可靠的、容錯的即時通訊在工業中使用。ROS 2採用DDS做為主要通訊,提供一個統一的資料交換環境,就像一條資料之河(Data River),因此群機AMR可相互溝通傳訊,其他採用分散式資料服務技術的設備,也可以透過資料之河共用資料。
DDS是ROS 2的關鍵元件,其技術核心是以資料為中心的發布-訂閱(Data-Centric Publish-Subscribe, DCPS)模式,提供一個所有獨立應用均可使用的全域資料空間。
美國海軍使用ROS 2,解決船艦在複雜的網路環境下,大規模進行軟體升級的相容性問題。自2004年物件管理組織(Object Management Group, OMG)發布以來,DDS被廣泛用作資料發布和訂閱的標準解決方案,在自主和要求苛刻的系統中,實現分散式的即時通訊。
在尋找合適的基於ROS 2的AMR解決方案時,需要考慮以下幾個因素:
1.首先,開發人員必須確定系統是否針對AMR導航進行優化(包括硬體/軟體整合),以避免耗時的相依性、版本問題和編譯錯誤。
2.為利用感測器的融合實現高精度,以及多個整合感測器之間的時間同步,例如GMSL圖像(十億位元多媒體串列鏈路),慣性量測單元(IMU)至關重要。
 圖2 從ROS 1進化到ROS 2,實現群體機器人的自主化。
圖2 從ROS 1進化到ROS 2,實現群體機器人的自主化。
3.為優化資料的內部處理,需要考慮系統是否具有共用記憶體的機制,如圖3所示。在傳統的實現方法中,系統中的進程需要透過作業系統網路層傳遞消息,這樣就會導致延遲的現象。使用共用記憶體並直接執行傳輸是一種經過優化的解決方法,可以顯著降低延遲。
 圖3 使用共用記憶體的機制優化演算間的通訊。
圖3 使用共用記憶體的機制優化演算間的通訊。
4.找到一種可以提供分散式通訊的解決方案,在確保容錯和冗餘的同時支援群機自主化。
最後要考慮解決方案是否易於實施。一些供應商提供軟體開發套件(SDK),透過優化DDS的性能,支援群機架構並確保通訊的穩定可靠。Eclipse Cyclone DDS是一種快速可靠的DDS實現,被ROS 2技術指導委員會(TSC)選為ROS 2 Galactic Geochelone版本的預設ROS中介軟體(RMW)。此預設配置適用於大多數開發人員,但若有需要也可以使用非預設RMW進行配置。
為更輕鬆地實施和更快地部署,建議尋找能夠提供整合式開發環境(IDE)、經過測試和驗證的套裝軟體的應用,以及提供參考設計範例程式的供應商。為了幫助開發人員輕鬆地從ROS 1進化到ROS 2,一些供應商還提供教學指南,其中包括各種轉移過程相關的好處和問題。
廠商實現群機自主化
有廠商如凌華科技近期與鴻海集團合作,在其生產場域導入AMR,希望藉此提高生產線的靈活性。兩家廠商共同成立名為法博智能移動(FARobot)的合資企業,利用ROS 2開發先進的群機機器人系統(Swarm Robot System, SRS)和自主移動機器人解決方案,如圖4所示。
 圖4 FARobot AMR機器人可提高工業生產的效率和生產力。
圖4 FARobot AMR機器人可提高工業生產的效率和生產力。
由於AMR之間可以進行即時通訊,因此它們可以執行任務調度和分配,並使用P2P通訊的通訊方式來確定每台AMR的位置路徑。如果其中一台AMR出現故障,車隊將立即啟動備案,並自動派出最合適的機器人進行協助。
FARobot的AMR解決方案具有群機協作、任務容錯轉派和性能優化等特點。透過採用最新的群機自主化技術,FARobot AMR機器人可以提高工業生產的效率和生產力。例如,在正確的時間將正確的原料或零組件運送到正確的地點,以減少不必要的停留。
未來工廠讓機器做到自主協調
有廠商如友嘉集團,意識到勞動力的短缺和需求的變化,需要立即進行物流升級、提升檢測能力以及增強技術服務。雖然該公司使用AGV,但是他們希望增加系統的靈活性以提高效率並降低成本。友嘉集團則是聯合了凌華科技、資策會共同建構智慧工廠。
該專案團隊相關成員均認知到,在部署智慧工廠解決方案時,必須考慮製造的靈活性、工廠的擴編和產線的快速切換。在這些環境中,溝通是關鍵。DDS可以在有線和無線網路以及具有多種無線通訊技術的生產製造環境中充當中介軟體。對此,具有高可靠性的DDS,結合5G專網的低延遲和高速傳輸,可提升AGV的靈敏度和回應速度。
第一次實施群機自主化是在友嘉集團的岩田友嘉精機工廠的工業級噴槍生產線上,該工廠位於新竹縣湖口鎮。生產設備和營運監控中心與5G專網和DDS進行即時整合,並整合生產線資訊再連接到AMR,將零組件運送到多個檢測部門以提高生產力,如圖5所示。 該實施包括三個重要的技術應用,包括AMR解決方案、自動光學檢測(AOI)和擴增實境(AR)智慧眼鏡。該組合使工廠的良品率提高15%,生產成本降低20%。
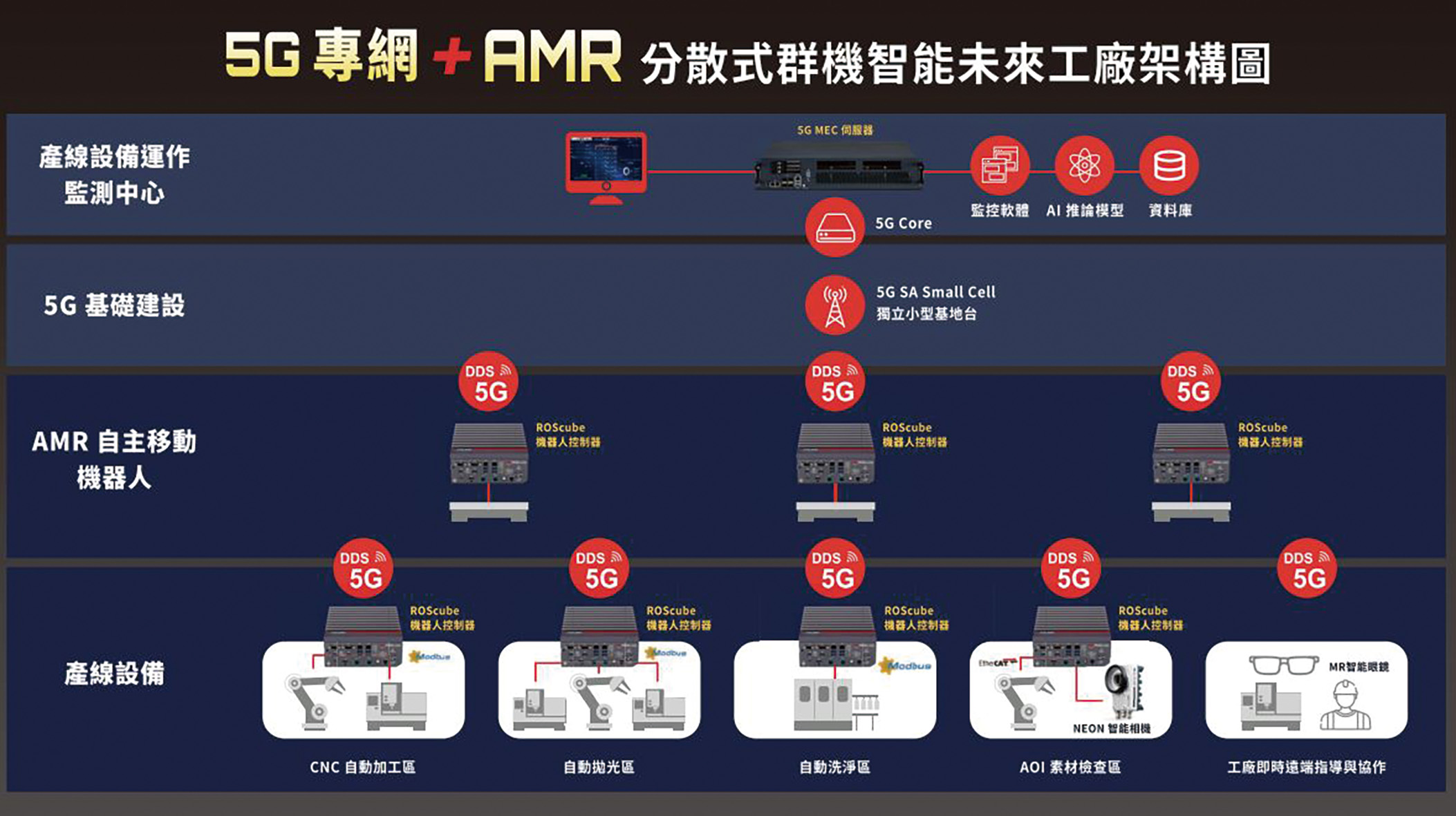 圖5 即時整合生產線資訊並連接AMR進行運輸。
圖5 即時整合生產線資訊並連接AMR進行運輸。
展望AMR未來
隨著對採用P2P通訊的群機自主化需求的增加,產業趨勢將繼續從AGV進化到AMR,從ROS 1轉移到ROS 2。ROS 2是輔助AMR開發和部署的突破性應用,涵蓋包括工業在內的眾多產業。
最近的疫情將AMR帶入醫療領域,以實現病房和加護病房的自動消毒。AMR還可以為患者提供支援和移動協助。零售業、店面和餐廳的服務型機器人,以及用於智慧訂單交貨都有AMR的身影。其他應用包括自主化農業和智慧收割、建築、工業清潔以及災後重建等等。
AMR的開發和部署需要付出更多的努力,不是一家公司就能獨立完成的。它需要一個完整的生態系統,包含即時軟硬體平台提供商、感測器和系統整合商、應用的最終用戶。
(本文作者為凌華科技新世代機器人平台事業處產品經理)