設定影像處理環境是任何影像處理系統關鍵的第一步。如果設定正確,開發人員即可將開發時間專注在應用程式中,而不是來自環境的問題,並且能夠在執行期間節省寶貴的處理時間。一般而言,設定系統時須考慮下列三項元素:影像處理系統參數、照明及其他動態考量。
設定影像處理系統參數
在取得影像之前,必須先設定好影像處理系統。一個影像處理系統是由解析度、視野、運作距離、感應器尺寸及景深五種基本參數所構成,圖1描繪出這些概念。
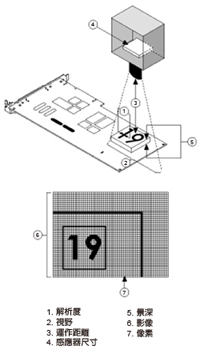 |
| 圖1 影像處理系統的基本參數 |
設定系統的使用參數,必須依所需的分析、處理及偵測類型而定。影像處理系統應該要能夠從影像中擷取出足夠資訊的高品質結果。五種因素構成整體影像品質:解析度、對比、景深、透視及變形。
決定解析度
解析度代表影像處理系統可重製物體細節的數量。可藉由以真實世界的單位測量偵測影像所需的最小物體的尺寸,來決定影像處理系統所需要的解析度。
圖2是一個條碼。若想讀取條碼,須要偵測影像中最窄的條碼紋。在此案例中,影像系統的解析度就相當於最窄條碼紋的寬度(w)。
若想獲得精確的測量,兩個像素的最小值應該要能呈現想要在數位影像中所偵測的最小物體。在圖2中,最窄的垂直條紋(w)應該至少是影像中的兩個像素寬。有了這項資訊,可以使用下列的指導方針,為應用程式選擇適當的攝影機和鏡頭。
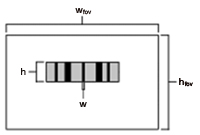 |
| 圖2 決定影像處理系統的解析度 |
第一步,必須決定攝影機的感應器解析度。感應器解析度是攝影機感應器電荷耦合元件(CCD)像素的欄與列的數目。若想計算感應器解析度,必須知道視野(FOV)。視野是攝影機可以取得的受偵測區域。偵測區域的水平和垂直尺寸決定視野。須確保視野能夠圍繞想要偵測的物體。
一旦知道視野,就可以使用下列的公式1來決定所需要的感應器解析度:
感應器解析度=(視野/解析度)×2=(視野/最小物體大小)×2 .....................公式1
為視野及最小物體的尺寸使用相同的單位,並選擇與最小物體的方向相符的視野數值(水平或垂直)。例如,必須使用水平視野數值來計算圖2的感應器解析度。
市面上製造的攝影機通常只有幾種有限的標準感應器解析度。表1顯示了幾種典型的攝影機感應器,以及它們大概的成本。
如果需要的感應器解析度並不符合標準感應器解析度,則選擇大於所需要之感應器解析度的攝影機,或是使用多台攝影機。攝影機的價格會隨著感應器尺寸增加。藉由決定所需要的感應器解析度,就能夠將符合應用程式需要的攝影機選項數目降低。
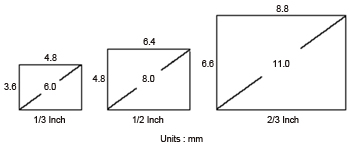 |
| 圖3 常見感應器尺寸及其實際尺寸 |
另一項影響攝影機選擇的重要因素,是感應器的實體尺寸,也稱為感應器尺寸。圖3所顯示的感應器尺寸,是標準的1/3吋、1/2吋和2/3吋的感應器。感應器的名稱並不會反映真實的感應器尺寸。
在大部分的情況下,特定感應器解析度的感應器尺寸是固定的。如果發現攝影機有相同的解析度,但是有不同的感應器尺寸,可以依據下列的指導方針決定所需要的感應器尺寸。
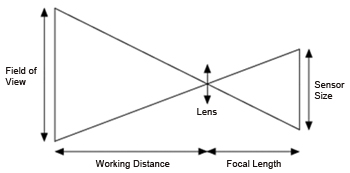 |
| 圖4 焦距、視野、感應器尺寸和運作距離之間的關係 |
第二步是決定鏡頭的焦距。鏡頭主要是由其焦距所定義的。圖4描繪了鏡頭的焦距、視野、感應器尺寸和運作距離之間的關係。
運作距離是從鏡頭前方到受偵測的物體的距離。如果知道視野、感應器尺寸及運作距離,就可以使用下列公式2計算出鏡頭的焦距:
焦距=感應器尺寸×運作距離/視野 .....................公式2
市面上製造的鏡頭通常只有幾種有限的標準焦距。常見的鏡頭焦距包括6毫米(mm)、8毫米、12.5毫米、25毫米和50毫米。一旦選擇了焦距最接近自己的影像處理系統所需要的焦距的鏡頭後,就只須要調整運作距離,就能將受偵測的物體聚焦。
擁有較短焦距(低於12毫米)的鏡頭,會製造出有大量變形的影像。如果個人的應用程式對於影像變形十分敏感,則嘗試增加運作距離,並使用擁有較高焦距的鏡頭。如果不能變更運作距離,就只能選擇適當的鏡頭。
須注意的一點是,在設定個人的系統時,必須微調焦距的各種不同參數,直到達成各種元件的正確結合,以符合自身的偵測需求及成本需求。
提升對比
解析度和對比對於影像品質而言,是兩種比較接近的因素。對比定義了偵測中的物體和背景的亮度數值的差異。影像處理系統應該具有足夠的對比,以便將物體與背景做區隔。適當的照明技巧可以提升系統的對比。
設定景深
一個鏡頭的景深,能夠保持焦距中的物體各種不同高度,或是位於攝影機各種不同距離的物體的能力。如果需要以各種不同高度偵測物體,選擇可以隨物體移動,或移近移遠鏡頭,並能維持影像品質的鏡頭。能夠藉由關閉鏡頭的光圈來增加景深,並提供更強大的照明。
末端中節(Telocentric)鏡頭可配合廣景深運作。使用末端中節鏡頭,可以從鏡頭拍攝物體各種不同距離的影像,並讓物體集中在焦距內。
避免透視錯誤
透視錯誤會在攝影機軸心未與受偵測的物體垂直時發生。圖5a顯示理想的攝影機位置。圖5b則顯示一台攝影機由某個角度拍攝一物體的影像。
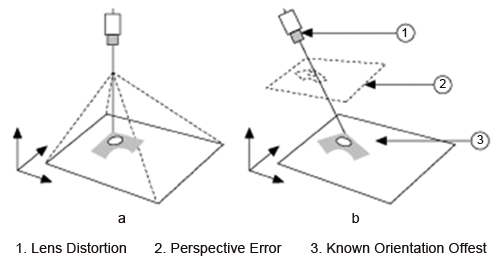 |
| 圖5 與受偵測物體相關的攝影機角度 |
而圖6a顯示一個點狀格線。圖6b則顯示了攝影機影像由一角度處理格線時,所造成透視錯誤。
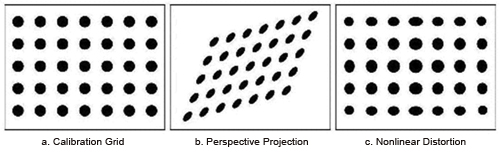 |
| 圖6 透視及變形錯誤 |
試著將攝影機與受偵測的物體保持垂直,以降低透視錯誤。整合限制可以防止將攝影機直立於場景上。在這些限制之下,仍然可以藉由空間調校校正透視錯誤,得到精確的測量結果。
留意變形
非線性變形是由攝影機鏡頭的光學錯誤所導致的幾何變形。典型攝影機鏡頭會導致放射狀變形。這會導致遠離鏡頭光學中心的點,比它們實際上更遠離中心點。圖6c描繪一點狀格線的變形效果。當發生變形時,影像中的資訊相對於視野中心是錯置的,但是資訊未必會流失。因此,可以透過空間調校避免影像的變形。
取得適當照明
設定影像處理環境最重要的觀點之一,就是適當的照明。在適當照明條件下所取得的影像,可以讓影像處理軟體開發變得更容易,讓整體處理時間更為快速。
照明的目標之一,就是將想要偵測的物體,與周圍的背景以盡可能多的灰階值分隔開來。另一個目標是控制場景中的光線。設定照明裝置,讓環境照明中的變更(例如陽光因天氣或日照時間而變更)不會影響到影像的分析和處理。
 |
| 圖7 使用擴散照明來消除反光現象 |
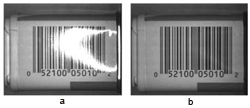
常見的光源類型包括鹵素燈、發光二極體(LED)、螢光和雷射。所選擇的照明技巧類型,可以決定應用程式的成功或失敗。不恰當的照明可能會導致陰影或反光,降低影像處理工作的效能。
例如,某些物體因為它們的彎曲或表面材質,可能會反射出大量的光線。高方向性的光源會增加反射性亮面(反光)的敏感性,如圖7a所顯示的條碼般,而圖7b顯示在擴散照明下所取得的相同條碼的影像。
 |
| 圖8 使用背光來建立一個體的剪影 |
背光是另一種照明技巧,可協助改善視覺系統的效能。若希望藉由只查看物體的形狀來完成個人的應用,可能須要在所擷取影像物體的背後放置光源,以建立物體的剪影。透過在物體背後進行照明,可以建立擁有明顯邊緣的清晰對比,並快速而簡單地測量距離。圖8顯示一個設定背光後所取得的郵戳式金屬零件。
許多其他的因素,例如所選擇的攝影機,都會對選擇適當的照明決定造成影響。例如,可能想要選擇波長能與攝影機的CCD感應器的敏感度,以及偵測中物體色彩相符的光源或濾鏡。此外,也可能必須使用特殊的照明濾鏡或鏡頭,以取得符合偵測需要的影像。
考量物體動態變化
在某些機器視覺應用中,受偵測的物體會移動,或是擁有移動零件。在其他的應用上,可能必須運用動態控制以便在各種不同位置將攝影機對物體定位,或是在攝影機的範圍內移動物體。應用程式中取得的動態影像,往往會顯得模糊。可依照下列的建議,降低或消除因動態而引起的模糊。
消除由物體動態所引起的模糊的方法之一,就是使用連續式掃描攝影機。連續式掃描攝影機會在一個時間取得完整的影格,而標準交錯式攝影機則會分別取得奇數和偶數欄位,然後再將它們交錯。交錯式攝影機會發生由動態所導致的影像模糊,這是因為兩種欄位並不是在同一時間取得的。
另一種消除由動態所導致的影像模糊的方法,是配合連續式掃描攝影機使用閃光燈。攝影機感應器在取得移動物體的影像時,需要較短的曝光時間以避免模糊。若想取得擁有足夠對比的影像,感應器必須在短時間內暴露在足夠的光線量下。閃光燈只會在幾微秒(μs)內放射光線,因此限制了影像對CCD的曝光時間,並造成非常清晰的影像。閃光燈須要與攝影機進行同步化。
另一種避免因移動物體所產生的模糊的方法,就是使用線性掃描攝影機。線性掃描攝影機會在同一時間取得一影像的單一線緒,因此可以消除模糊。可以從動態感應器如編碼器使用外接觸動器來觸動線性掃描攝影機。
(本文作者任職於美商國家儀器)