對於更高效能全球衛星定位系統(GPS)的持續追求,已對GPS接收器元件製造商帶來極大的挑戰。現行的GPS系統是由許多個30多年前發射到軌道上運行的昂貴GPS衛星所組成。對於這樣一個行之有年的既有系統,很難期望在衛星方面能有什麼改善,因此提升GPS效能的責任,就只好落在GPS接收器業者的身上。
現行GPS衛星系統有以下兩個主要的限制:
| ‧ |
|
| |
GPS衛星是在距離地球20,000公里的軌道上運行。當訊號到達地面接收器時,通常只有-120dBm的強度,甚至在都會區中訊號還會進一步衰減(圖1)。因此,要從背景雜訊中將GPS訊號分離,確實是極大的挑戰。 |
| ‧ |
|
| |
一個具1,500位元的完整GPS訊框須要花30秒的時間接收,而GPS訊號僅能以每秒50位元的速度傳輸。此外,必須要先能找到四個不同的衛星並下載其訊框後,才能進行位置的計算。 |
 |
| 圖1 GPS衛星訊號非常為微弱且緩慢。 |
這些問題使得接收器不容易找到並鎖定GPS衛星訊號,特別是在冷開機(Cold Start)的情況下,亦即接收器在長時間關機後又重新啟動,這時沒有可視(Visible)衛星的記憶資料。當花時間找到衛星後,還要約30秒來下載計算定位的所需訊框,若處在微弱訊號環境中,則必須耗用更長的時間。這些限制的確會使消費者對立即定位的期望大打折扣。
要克服這些既有限制,就必須在接受器端開發出更聰明的技巧,才能改善GPS效能。u-blox是全球少數幾家專精於GPS接收器設計的公司,在其發布u-blox 6 GPS接收器平台的第七版韌體時,已確實做到了這一點。
其主要的挑戰有四,包括更快找到衛星訊號、更快地擷取或推算其軌道位置資料、功耗更低,以及發揮無線通訊綜效,以提升效能並實現新功能。在最新的u-blox 6 GPS平台升級中,採用先進硬體、軟體及軌道技巧,可在這些主要領域中提升效能。
依衛星軌道預測 毋須外部輔助定位
自主定位(AssistNow Autonomous)是內建於u-blox 6 GPS接收器中的新增、免成本功能,其執行第七版或更高的韌體,毋須與主機或外部網路連接,就可以提供與輔助式GPS(Assisted-GPS)類似的功能性(圖2)。以先前下載並儲存在GPS接收器的廣播衛星星曆資料為基礎,AssistNow Autonomous能自動產生正確的衛星軌道資料,供未來GPS位置定位之用。
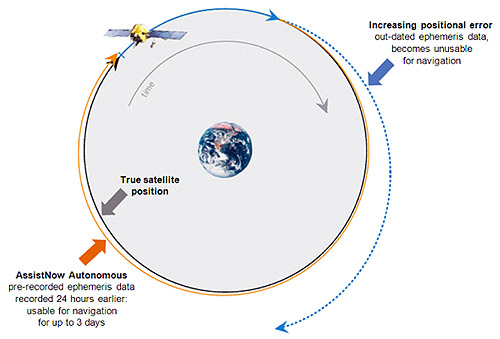 |
| 圖2 自主定位為u-blox 6的新特性,以衛星星曆預測為基礎,毋須網路連接或與主機整合,便能實現GPS的加速定位。 |
此概念是利用GPS衛星的週期特性。基本上,衛星在天空中的位置每24小時會重複一次。透過在1天中的特定時間擷取星曆資料,便能稍後在固定時間或根據應用時段需求進行定位初始化,這種運用先前儲存星曆資料的方式,可更快獲得定位結果。在初次擷取後,AssistNow Autonomous資料在3天內都是可靠的。
此快速定位的效能提升,對於需要每天於固定時間或固定間隔取得GPS定位應用來說特別有用,典型的應用包括GPS記錄器、追蹤器,甚至每天會在相同時間開機的消費性導航裝置,例如每天在固定時間離家工作、離開辦公室外出午餐等。
AssistNow Autonomous的效益包括在GPS訊號微弱的情況下,仍可提供快速定位;毋須與外部網路連接或外部資源;可與AssistNow線上和離線服務相容,能夠單機或與這些服務一起執行;毋須整合資源,定位計算能在背景中自動執行,使用者不會感受到;無需額外成本。
接收器與無線模組互通
所有u-blox 6 GPS接收器都可與u-blox精巧型的LEON 2G和LISA 3G無線模組以直接介面相連。這提供一個行動通訊的備用通道(Back-channel),以實現多種深具吸引力的應用,例如:
| ‧ |
|
| |
消費性裝置能在基本的導航功能外,提供全新功能,如定址(Location-based)網站內容和社交網路、緊急定位及人員/位置協尋服務。 |
| ‧ |
|
| |
車輛和資產追蹤器能在世界各個角落通報其確實位置,讓人們和機器對貴重貨品進行管理與監督,以最佳化供應鏈管理,並為貴重商品提供安全性和位置概況。 |
| ‧ |
|
| |
可具備精密追蹤車輛確實行駛路程與距離的能力。隨著道路上的車輛數目日益增加,此功能有助於創造營收,實現使用者付費目標,並同時為隨收隨付制(Pay-as-you-go)保險提供計量系統。 |
| ‧ |
|
| |
可讓車載電腦自動偵測碰撞,並撥出電話,傳送精確位置向緊急服務求助。 |
 |
| 圖3 CellLocate蜂巢式定位技術在停車場的安全應用實例,可偵測車子是否被移動。 |
此外,可支援u-blox新推出的CellLocate蜂巢式定位(Cellular Positioning)系統,以提升可靠度和室內定位功能(圖3)。雖然GPS是一覆蓋範圍廣的技術,但其必須依賴極微弱GPS訊號的可視性,這意味著,定位功能並不一定能夠執行,特別是在訊號被遮蔽的環境中,或是當GPS干擾訊號存在時。此情況可透過利用可視的行動電話基地台參數,以增加GPS接收器資料來改善。這些資料可提供一定程度的備援(Redundancy),可適用於特別要求準確度的應用,或僅用來回報位置是否有變動。
u-blox透過其自行開發的GPS接收器以及LEON 2G和LISA 3G無線收發器模組,已建置一個稱為CellLocate的混合式定位架構,可透過線上查詢表(Look-up Table)將可視的行動電話基地台參數如身分、訊號強度與先前儲存的GPS位置資料比對,以提升多種使用情況下的定位性能:
| ‧ |
|
| |
在此情況下,利用全球行動通訊系統(GSM)/通用行動電信系統(UMTS)資訊的備援蜂巢式定位系統能透過混合式蜂巢式/歷史GPS線上查詢表,提供最佳狀況10公尺範圍的預估位置。這對車隊或貨櫃追蹤應用來說深具吸引力,因為這些應用會要求能為高價資產提供大概位置,比無法定位來得好。此外,此系統在訊號被遮蔽的運輸工具中亦能使用。 |
| ‧ |
|
| |
在市面上,可輕鬆地以不到100美元的價格買到一台GPS干擾裝置。這些裝置會使GPS接收器無效,因此常被宵小用來偷竊汽車。這時,備用的蜂巢式系統就能作為輔助系統,因為GSM/UMTS蜂巢單元訊號不會受GPS干擾器影響。GPS接收器也能為此系統增加智慧,因為它可用來偵測干擾訊號是否存在,並將此系統顯示為意圖行竊的狀態。在某特定蜂巢單元內的車輛大概位置就能快速取得,一旦車輛穿越單元邊界時,透過方向和速度訊息將有助於找回車輛。 |
以u-blox的AssistNow Online GPS輔助服務為基礎,u-blox開發這套具學習架構和中央資料庫的混合式蜂巢/GPS定位系統。其原理是將歷史蜂巢定位資料與先前成功的GPS定位資料進行比對,以建構一個與可視基地台參數相符的GPS座標資料庫。在此狀況下,當此蜂巢單元位置在日後被確定時,GPS位置就能夠透過無線存取網路上的查詢表推算出來,因此即使在沒有GPS訊號的情況下,也能成功進行定位。
此學習性解決方案非常適用於許多物體集中活動於某個可預測區域內的應用,例如都會區中的計程車隊、以鐵路或卡車運輸的貨櫃或棧板,或是校園中的學生/員工。在這些情況中,能快速產生大量的蜂巢單元資料庫,然後將其與精密的GPS座標比對,以供稍後的定位之用。
在另一種情況下,則是監控可視基地台資訊,以判定是否有發生某種動作。例如,只要可視基地台和訊號強度不改變,就能假設位置並未更動。
以上這些結合蜂巢單元與GPS定位資料的情況,可較採用其中單一技術產生更佳的結果,例如可提升定位效能並擴展至GPS衛星訊號100%被封鎖的區域,特別是在貨櫃中;不會再有無法定位的情況發生,只要在行動電話的覆蓋範圍內,就至少能夠提供大概位置,或位置是否變動等訊息;克服GPS干擾,以提升防盜系統的效能。
提升靈敏度和定位效能
為滿足市場要求智慧型手機和個人導航裝置等手持式產品朝小型化的發展趨勢,只能採用尺寸最小的表面黏著天線設計,導致GPS訊號等級非常低,因此接收器必須更為靈敏。u-blox 6 GPS接收器的最新升級可因應這些需求,在以下三個關鍵領域增強靈敏度:
| ‧ |
|
| |
此為接收器能完成首次定位的最低訊號功率水準,通常是指將一台長時間停機的GPS接收器重新供電啟用。此數據對於要將衛星訊號從背景雜訊中分離與取出,並擷取星曆資料所需時間有直接的影響。在最新的升級版中,可較前一代產品提升1dB的靈敏度。 |
| ‧ |
|
| |
此為接收器能追蹤到個別衛星的最低訊號水準,這對持續操作的GPS接收器有直接影響,特別是在高樓林立的都會區惡劣環境中。在最新升級版中,可將此數據降低至-162dBm,比第六版韌體提升2dB。 |
| ‧ |
|
| |
這通常是用在GPS衛星被暫時封鎖的情況下,例如剛從隧道中出來。此數據較先前產品提升5dB。這能在重要時刻節省寶貴的定位時間,例如剛從停車場出來時必須要立刻決定向右或向左轉。 |
| ‧ |
|
| |
透過最新的韌體升級,u-blox 6接收器現可與海運服務無線技術委員會(RTCM)協定相容,使其能利用由RTCM信標(Beacon)接收到的差分修正數據提升定位準確度。RTCM信標能對個別GPS衛星訊號提供修正資料,這些訊號會受空氣條件影響而失真。 |
較低的功率消耗
在新版升級中,採用新的省電模式,可將電流消耗較先前產品降低35%。此模式可提供自動電源管理功能,以滿足特定應用的最佳的功率/效能需求。此特性能讓射頻和基頻電路自動、智慧地關閉,並具有自動喚醒功能。這可為重視省電功能的應用帶來最佳效能。舉例來說,須要週期性執行GPS功能的手持式消費裝置,因為是以電池供電,對功耗要求就會高於車載GPS系統。
具先進獨立式汽車慣性導航
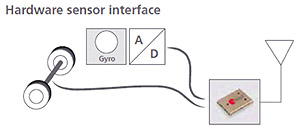 |
| 圖4 針對PND售後市場開發的車用慣性導航裝置,採用LEA-6R GPS模組。 |
u-blox 6最新版本納入對LEA-6R GPS模組的汽車慣性導航(ADR)功能支援(圖4)。此u-blox的專屬ADR技術是以上一次的定位資訊為基礎,汽車感測器直接將訊息傳送給u-blox GPS接收器,指出車輛行駛的距離與方向。感測器資料和GPS位置都會被處理,即使是在嚴苛環境中如大樓林立的都會區或沒有GPS訊號如隧道和停車場,都可以達到100%的覆蓋率、高準確度和持續定位。
u-blox的ADR可支援不同的感測器輸入,稱為陀螺儀及車輪記號(Gyroscope plus Wheel Tick, GWT)的標準設定,是由可提供方向訊息的陀螺儀及可提供速度訊息的車輪記號所組合。
監控干擾訊號
 |
| 圖5 除極弱的衛星訊號外,GPS接收器還必須處理各種蓄意和非蓄意的干擾訊號。 |
最新升級版中的另一項功能,是可因應日益普遍的低成本GPS干擾器(圖5)。它具有偵測干擾訊號存在的能力,能有效提升安全性,特別適用於汽車防盜和資產追蹤等應用。
由於能夠偵測干擾訊號的存在,u-blox 6 GPS接收器現已可為定位系統增加智慧,並將其回報給主機處理器。例如,此功能可將系統設定為意圖行竊的情況,並啟動警報或警示訊號,或執行備用定位系統如u-blox於今年推出的GSM蜂巢式定位技術。
(本文作者依序為u-blox通訊經理、u-blox台灣區總經理)