毫米波感測器常見於自駕車、物聯網、工業自動化等蓬勃發展的領域,使用需求增加使其成本逐漸下降,進一步帶動相關研發及應用,在各種科技趨勢扮演關鍵角色。若要徹底運用毫米波感測器,工程師必須深入瞭解所設計應用的特點及毫米波感測器的相對優缺點。
毫米波(mmWave)感測器使用電磁頻譜中的特定頻段:介於30GHz到300GHz頻率之間,或10毫米到1毫米的對應波長之間。這些感測器的名稱及命名方式根據其使用的波長來決定。基於毫米波感測器的運作頻率,有時它是無線電偵測及測距(雷達)的代名詞。
近年來,自駕車、物聯網(IoT)、智慧建築及工業自動化等,常將毫米波感測器整合於物體偵測及測距系統的領域蓬勃發展,使得毫米波感測器在各種設備的應用急遽增加。隨著使用需求增加,毫米波感測器的成本逐漸下降,進一步帶動了相關研發及應用。就其性能而言,毫米波感測器功能多元又具成本效益,在各種科技趨勢扮演關鍵角色。
若要徹底運用毫米波感測器,工程師必須深入瞭解所設計應用的特點及毫米波感測器的相對優缺點。若在充分掌握的環境正確操作精心設計的此類設備,就能夠建立可彈性擴充、低成本且有效的系統。
下文將概述毫米波感測器的工作原理,並說明如何針對各種應用進行開發。
毫米波感測器概述
幾乎在任何情況下,毫米波感測器都能作為主動感測器,發射能量以感應周遭環境。毫米波感測器的極高頻(EHF)範圍,使其具備元件尺寸較小、解析度較高及更精準等優勢。然而,較高的頻率也帶來如成本較高、在惡劣天候下衰減較快及散射度較高等缺點。表1列出毫米波感測器最常見的一些優缺點。
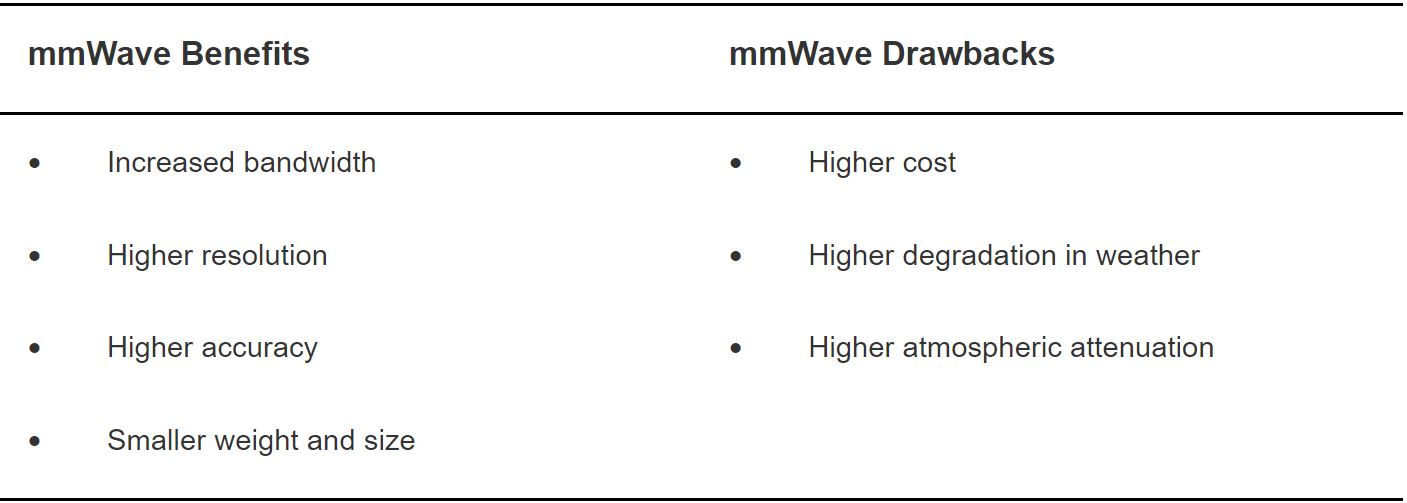 表1 毫米波感測器的優缺點 (資料來源:本文作者)
表1 毫米波感測器的優缺點 (資料來源:本文作者)
光偵測及測距(Light Detection And Ranging, LiDAR)感測器常與毫米波感測器進行比較,普及度也呈現驚人成長。這兩者在功能及一般用途有所重疊,在判定應採用哪種感測器時,這些比較相當重要。例如,對於在充分範圍內偵測異物碎片(FOD)而言,LiDAR點雲可能因為LiDAR點之間的相對間距而遺漏部分微小細薄的物體,因此使用毫米波感測器可能比使用LiDAR更合理。表2列出毫米波感測器與LiDAR各自的優點。
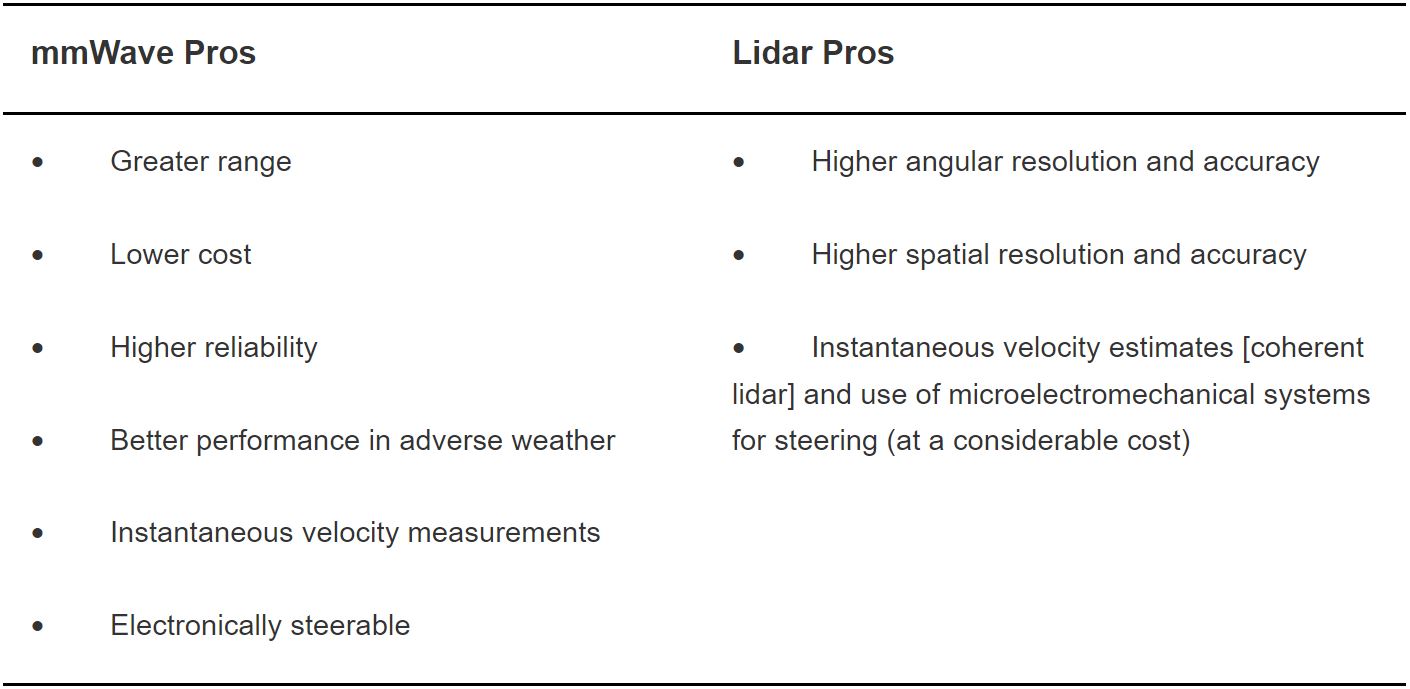 表2 毫米波/LiDAR優點比較 (資料來源:本文作者)
表2 毫米波/LiDAR優點比較 (資料來源:本文作者)
毫米波感測器相關元件
毫米波感測器由三大子元件構成:天線或輻射元件、發射器及接收器。這些子元件可根據設計目標進一步劃分。三大子元件一樣重要,且需要深厚的專業知識才能成功設計並整合成一項應用。
天線陣列是提供角解析度的輻射元件。天線陣列也能讓感測器控制波束、消除干擾源並改善感測器的波束模式。天線陣列的一項缺點,是必須為感測器配置大量覆蓋區,才能增加更多天線。
毫米波感測器的發射器及接收器決定感測器的波形,以及感測器處理天線送回訊號的效能。例如,雷達的距離解析度(Range Resolution)透過波形頻寬與發射器及接收器直接相關。發射器及接收器的設計(圖1)對於解決同相及正交不平衡相當重要,完善的設計有助於突破毫米波感測器的性能限制。
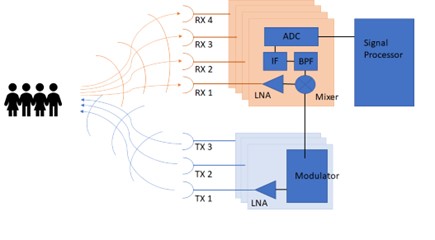 圖1 毫米波感測器子元件複雜設計及整合的示意圖 (圖片來源:本文作者)
圖1 毫米波感測器子元件複雜設計及整合的示意圖 (圖片來源:本文作者)
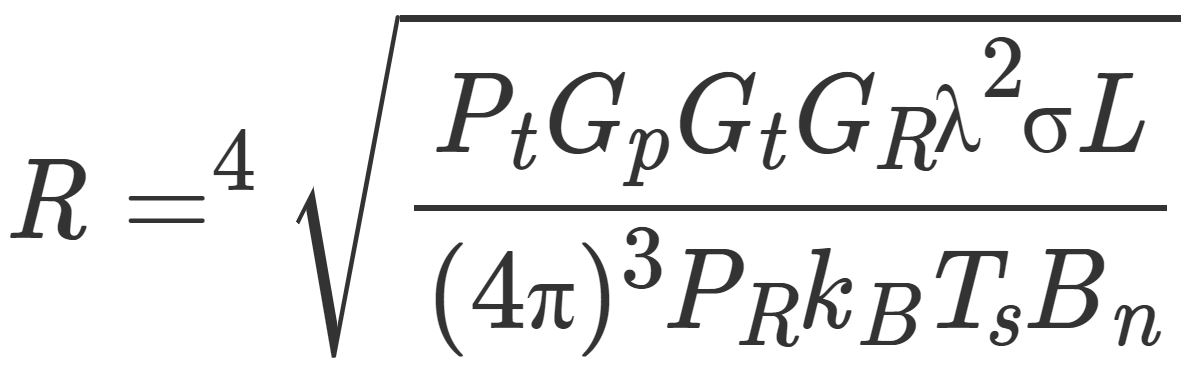
雷達距離方程式簡潔描述三項子元件如何通力工作並影響毫米波感測器(雷達)的性能。假設毫米波感測器設計精良且妥善處理混淆情況,相對最大偵測距離可表示如公式1。
........................(1)
其中,Pt表示傳輸功率,GP表示處理增益,Gt表示傳輸增益,GR表示接收增益,PR表示接收功率,σ表示目標的RCS,L表示系統其他損失,kB表示波茲曼常數,Ts表示系統雜訊溫度,Bn表示雜訊頻寬。
毫米波感測器關鍵參數
討論毫米波感測器時,需要考慮幾項關鍵參數。表3為基本參數清單。
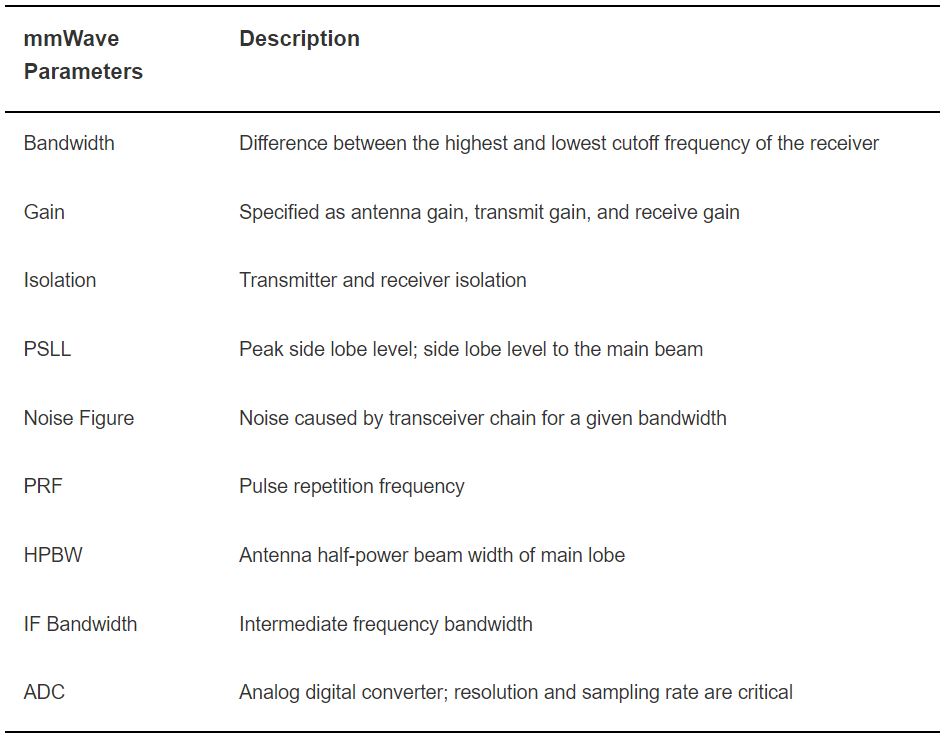 表3 毫米波感測器關鍵參數 (資料來源:本文作者)
表3 毫米波感測器關鍵參數 (資料來源:本文作者)
在大多數案例中,通常僅提供收發器(即發射器及接收器),不含天線。除非毫米波感測器具備已整合之天線陣列,否則天線設計並不包含在內,需要之後再進行設計及整合。如此一來,工程師可以依據特定應用客製毫米波感測器,指定設計參數,不必局限於可能並不適用的性能值,因此這通常是更好的選擇。
測量及追蹤
有了雷達距離方程式之後,以下簡單概述毫米波感測器偵測物體的步驟:
(1)發射器發送訊號,通常是線性頻率調變訊號。
(2)接收器接收與傳輸訊號混合的反射訊號。
(3)訊號通過帶通濾波器(Bandpass Filter)以消除偽影(Artifacts)。
(4)ADC取樣訊號。
(5)進行脈衝壓縮。
(6)進行範圍處理。
(7)進行都卜勒處理。
(8)進行角度處理。
(9)形成偵測(例如透過恆虛警率偵測)。
(10)形成軌跡並識別物體(例如透過m-of-n偵測、恆定加速度卡爾曼濾波器)(圖2)。
 圖2 毫米波感測器的訊號處理鏈 (資料來源:本文作者)
圖2 毫米波感測器的訊號處理鏈 (資料來源:本文作者)
圖2為毫米波感測器的訊號處理鏈,這些步驟顯示偵測及追蹤物體的高階流程及順序。
在形成偵測的流程中,距離解析度、距離精準度、都卜勒分辨率、都卜勒精準度及角度估計精準度都是關鍵指標(表4)。
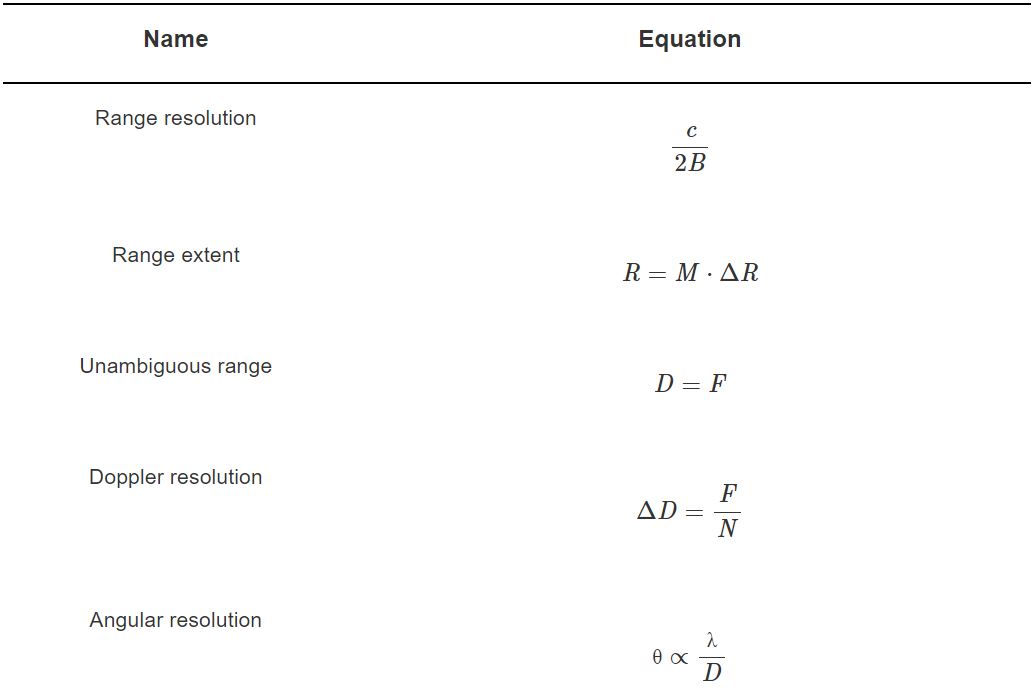 表4 毫米波感測器基本方程式(B=頻寬;F=脈衝重複頻率;M=快速時間樣本;N=緩慢時間樣本;D=天線孔徑) (資料來源:本文作者)
表4 毫米波感測器基本方程式(B=頻寬;F=脈衝重複頻率;M=快速時間樣本;N=緩慢時間樣本;D=天線孔徑) (資料來源:本文作者)
毫米波感測器設計考量一次揭曉(1)
毫米波感測器設計考量一次揭曉(2)