汽車產業近來的技術創新速度令人驚嘆。汽車電動化歷經了20年的線性發展,最近2到3年則開始呈現指數級的爆炸成長。
過去,汽車僅代表著交通工具的一種,而現今與未來的車輛可以說是煥然一新。目前幾乎每一輛新出廠的汽車都配有倒車顯影、停車輔助和死角監控等功能,有些還提供360度環景輔助系統。其他功能還包括:提供即時交通資訊,透過行動通訊網路查看潛在危險、其他用路人、車輛或行人。有些功能還可偵測駕駛人是否正在分心或感到疲倦。當車內的人享受著資訊娛樂系統,他們通常不會察覺到道路交通狀況,這時便需仰賴感測器、攝影機和網路來輔助運作。
隨著需求不斷上升,下一代先進駕駛輔助系統(ADAS)需配備具更高解析度的攝影機和雷達系統,因此便需要更高的速度和頻寬,來支援汽車網路、交換器和傳輸資料的連接。為符合先進技術的要求,汽車產業飛快加速創新,而這些技術需在現有配線基礎設施上,以高於1Gbps的速率運作。高頻寬和低延遲網路,將是因應未來汽車時效性和複雜技術挑戰的關鍵。
頻寬高達10Gbps的汽車乙太網路,已足以應付大部分的需求。而有些攝影機需要高達3,500Mbps的傳輸速度,因此人們該思考是否能使用其他技術,來傳輸如此大量的資料。
掌握傳輸頻寬要求
為了更充分地了解頻寬要求,可使用以下的公式,來計算視訊串流的近似位元速率:
畫面尺寸=解析度(Resolution)×色彩深度(Color Depth)
位元速率=畫面尺寸(Frame Size)×影格率(Frame Rate)
因此,假設以24位元色深和30fps速率,擷取ADAS攝影機的1080p影像時,所需的位元速率應為(表1):
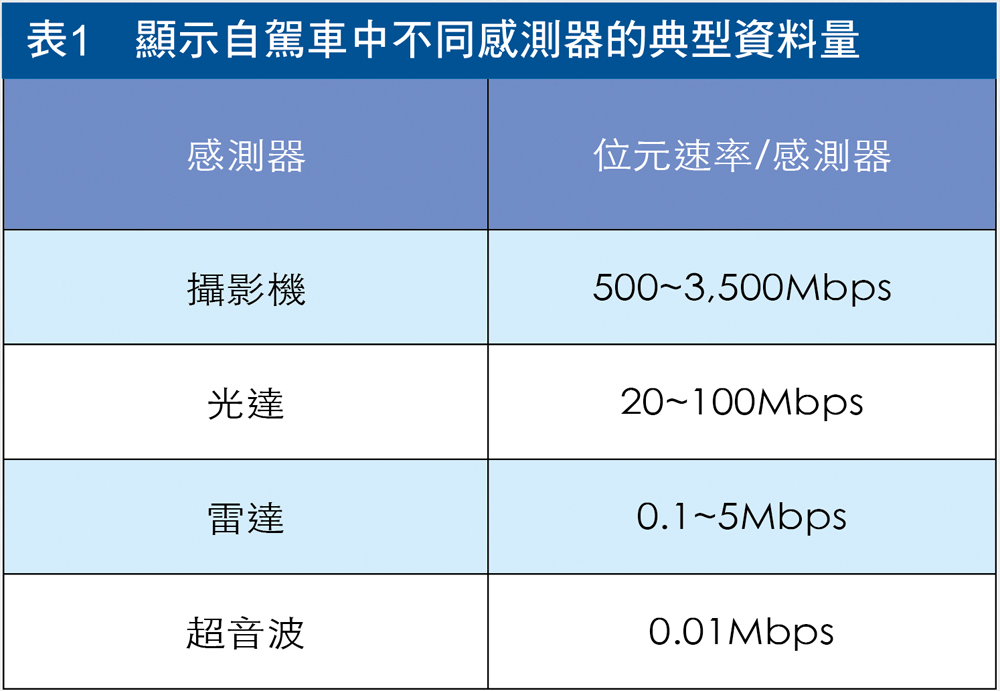
畫面尺寸=1920×1080×24=49,766,400
位元速率=49,766,400×30=1,493Mbps
汽車市場趨勢轉變
推動汽車市場發展的因素有很多,其中幾個最具影響力的因素包括:高頻寬和輕質材料的需求不斷增加;駕駛輔助系統的需求迅速上升;豪華車的需求增加;可因應未來變化的技術;資料安全性。
汽車產業開始追逐高頻寬技術和輕質材料,以便將燃油(或電池)效率最大化。源於ADAS和自駕車(AV)技術的要求,許多新車配有用於倒車顯影、停車和車道變換輔助的感測器,以及新型的抬頭顯示器和副駕駛顯示器,甚至還安裝了資訊娛樂系統。
此外,網路架構師還需了解如何隨著技術的進步,全面提升汽車性能。現今,人們期望汽車使用壽命可達10到15年。如果互連解決方案可提供額外的頻寬,那麼架構師可能現在就要開始進行設計,以便在汽車生命週期中提供客戶需要的ADAS/AV功能。當然,安全性是汽車設計的另一重要訴求。當越來越多AV和ADAS功能接管汽車駕駛操作,乘客安全成了備受關注的焦點。
乙太網路加速車用區域架構轉型
工程師一直在努力降低複雜性,其中也包括車載網路的複雜性。圖1是汽車在背板中使用不同資料速率的圖示。雖然有點簡化,但可以幫助大眾想像這些技術和標準如何協同運作,以便進行討論。
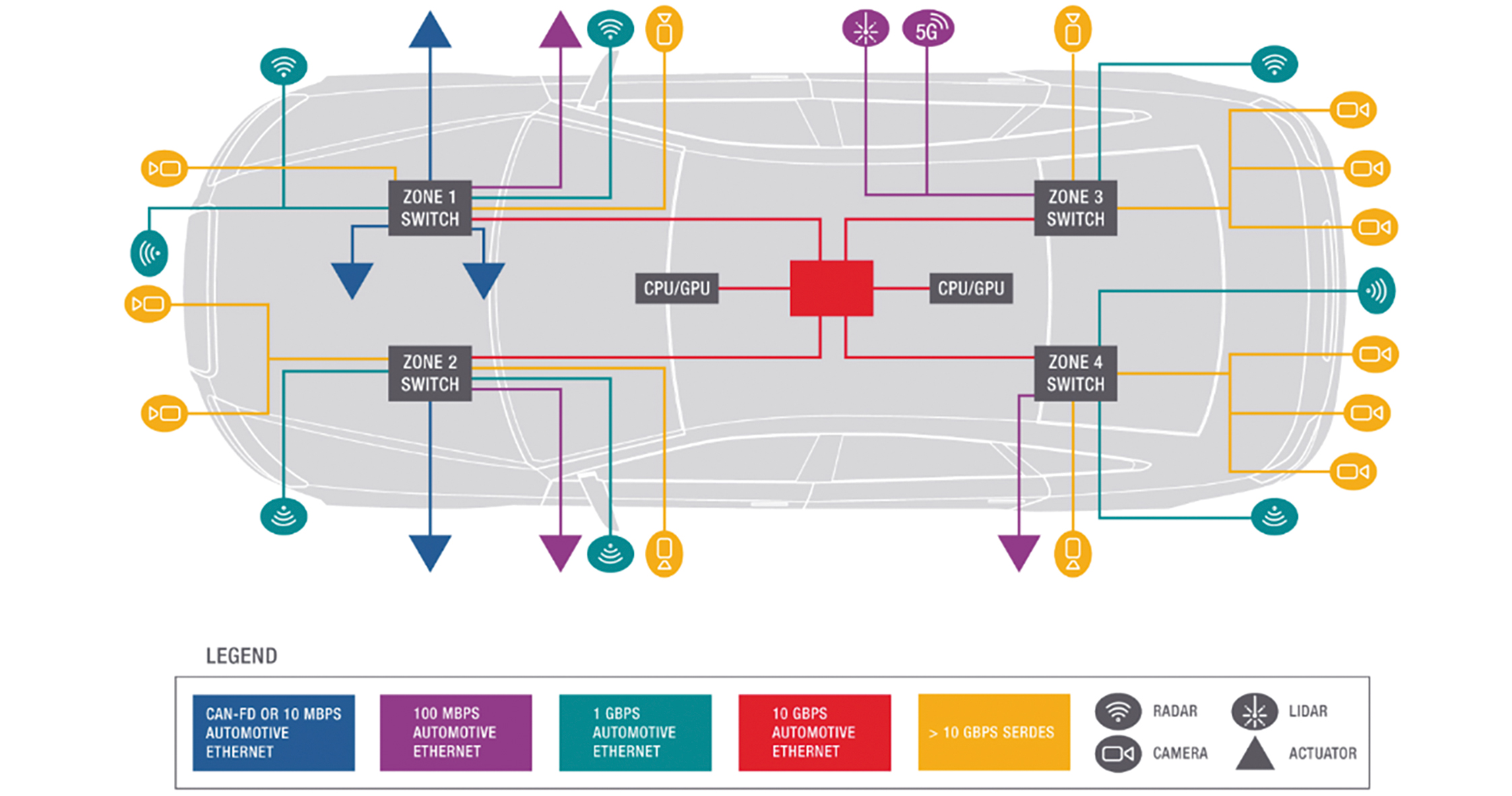 圖1 汽車網路架構的區域概念圖
圖1 汽車網路架構的區域概念圖
汽車區域架構可整合多個輸入,以便降低配線線束的複雜性、成本和重量,進而將原本的「多對一」架構,轉變為一對一的菊鏈架構(Daisy-Chained)。圖1顯示一個基於區域(Zone-Based)的架構,有些工程師則開始構思基於領域(Domain-Based)的架構。不論是區域或領域,這類架構都可匯集攝影機和感測器資料,而乙太網路則將各個區域或領域互連。由於中央運算複合體(Central Computing Complex)需透過聯網區域閘道器,連接到各個感測器和設備,因此區域架構可提供更出色的擴充性,以及更高的可靠性和功能性。
SerDes簡介
在當今的資訊娛樂系統中,車載攝影機和顯示器通常透過串列器/解串器(SerDes)連接到影像處理電子控制單元(ECU)。目前,各家供應商分別使用封閉的專屬標準來開發SerDes解決方案。
若欲延伸SerDes鏈路的距離,則SerDes需在較低鮑率(Baud Rate)和較高階調變(例如PAM-4)下運作。此外,它需要頻寬更高的乙太網路鏈路,以作為區域之間的主要互連;802.3ch或許可支援高達10Gbps的傳輸速率。
多家晶片供應商已開始導入各種新興的SerDes標準,例如MIPI A-PHY規格(適用於ADAS/ADS環繞感測器應用和車用資訊娛樂顯示應用的實體層規格),以及汽車SerDes聯盟(Automotive SerDes Alliance, ASA)規格。如此將提高市場競爭態勢,帶動成本降低,並提供特定應用所需的功能。整個生態系統都希望建立標準化的測試方法,以因應互通性要求。對於部署和測試業者而言,這有助於對晶片、一級(Tier 1)供應商,以及原始設備製造商(OEM)提出統一的要求,使得晶片供應商、Tier 1供應商和OEM廠商,能夠縮短開發週期、降低成本,並改善與其他商用裝置的互通性。圖2示意出一套可能的汽車顯示器使用案例,參考了新發布的A-PHY標準。
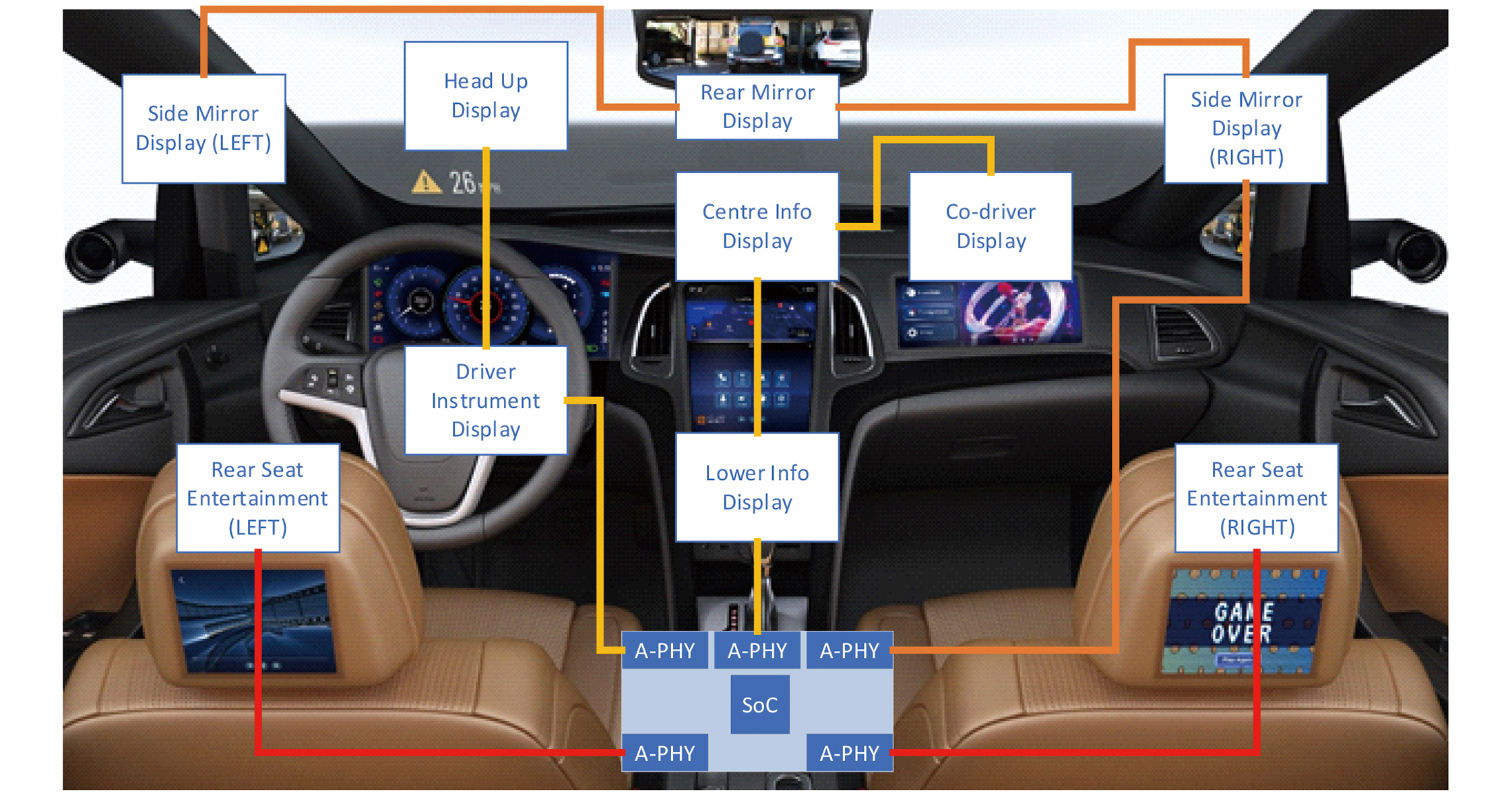 圖2 汽車顯示器使用案例
圖2 汽車顯示器使用案例
圖片來源:2021 MIPI Alliance, Inc.
下一代SerDes將提供可支援服務導向架構(Service Oriented Architecture)的功能,並提供協定穿隧(Tunneling)和調整(Adaptation)功能,使得新興的SerDes標準能夠沿著菊鏈鏈路,將傳統汽車協定,轉送至適當的ECU或橋接裝置。此外,安全關鍵型系統可利用串流複製(Stream Duplication)功能,在主要鏈路故障時進行自我複製。透過菊鏈,可將多個SerDes埠進行背對背連接,以便在資料到達ECU之前,聚合鏈路上的所有資料。最後,藉由採用符合ISO 26262標準的端對端保護機制,可解決各種功能安全問題。
在下一代ADAS/AV汽車中,這些功能將大受歡迎,但同時也有不少挑戰需要克服,包括不同的媒體相關介面(MDI)纜線和連接器、網路安全、與其他供應商的互通性,以及發射器測試的技術問題,確保PAM-N網路的線性度和功率頻譜密度(PSD)。驗證接收器是否能夠抗電磁干擾(EMI)也至關重要,確保接收器能在惡劣的汽車環境中運作。這是一項複雜的量測,包括在SerDes的接收器針腳注入預先定義、經校驗位準的雜訊,同時在可接受的誤差限制範圍內,監視其符碼時脈對齊的能力。
三大實體層測試
互通性是個關鍵問題。收發器是極為敏感的元件,必須在嚴苛的汽車環境中運作,包括高溫、震動、靜電放電(ESD)和EMI。
針對收發器測試分為三個項目:傳輸—確保傳送的內容符合預期;接收器功能的裝置(閘道器、模組、交換器、實體層)是否能夠可靠地接收正確的訊號;最後,收發器之間(亦即鏈路區段)的被動互連效能。實體層驗證同時涵蓋以上三個項目。
這些測試的最終目標,是確保不同供應商的產品能彼此互通。單單一輛汽車,可能就需要超過100家供應商投入研發,而標準組織則負責制定相關規格。根據已知標準進行評估,可確保資料完整性。
發射器確保良好訊號
測試發射器的主要用意是確保良好的訊號特性。因此需使用可當作接收器的工具,在本例中是示波器。待測裝置(DUT)會進入一系列已知狀態,而接收器則負責確認訊號是「有效」的。
圖3是包含線條的倒車顯影畫面範例。這些線條相當於傳輸中的間隙,即遭到丟棄的封包。若是一次或兩次斷訊仍可看到畫面,但如果此時車後方有個小孩,絕對不希望畫面整個變黑。
 圖3 汽車的倒車顯影畫面清楚顯示間隙
圖3 汽車的倒車顯影畫面清楚顯示間隙
通常車輛配備的攝影機由一家廠商製造,纜線則由另一家廠商製造,負責路由訊號的切換器,以及處理資料的GPU或ECU,還有汽車煞車裝置等,全都由不同廠商生產製造。這些由不同供應商製造的元件全都必須緊密地協同運作,更突顯了互通性的重要。
此外,當資料傳輸速率從比CAN快100倍,一下子提高到1,000倍,而且訊號傳輸速度也變得更快時,複雜度也會隨之大幅提高。調變類型只會變得越來越複雜。CAN等舊式標準使用NRZ或PAM-2訊令,汽車乙太網路和汽車SerDes則使用PAM-3或PAM-4訊令。因此,還需檢查這些發射器的測試資料完整性,包括:抖動測試,時脈誤差將可能導致發射器抖動;功率頻譜密度,指在一定頻率範圍內進行的雜訊量測(使用快速傅立葉轉換(FFT)或頻譜分析儀),因為在高速下,PCB軌跡可當作天線使用;藉由進行線性測試,來找出任何由反射引起的失真,避免出現發射器誤差和位元誤差。
最後,需確保資料不會造成輻射發射、反射或衰減,而且不會干擾其他電路。如未通過其中任何一項測試,就會出現符碼或封包錯誤,進而導致接收器遺漏訊框,或是像前面提及的那樣,顯示器中出現斷訊。
通道測試檢測阻抗/頻率
用於將這些裝置連接在一起的纜線、連接器、測試夾具或線束,形成了鏈路或通道。
向量網路分析儀(VNA)可分析通道對訊號的影響,確保發射器和接收器之間的訊號完整性。在惡劣汽車環境中,纜線長度也有很大的影響,因此務必查看阻抗與頻率的關係,以便評估車用電子之通道效能。
鏈路區段由纜線和Inline連接器,以及兩端的匹配連接器組成。最後,配線線束負責傳輸控制和酬載資料,並為遠端感測器提供直流電源。
對SerDes鏈路進行通道特性分析時,需執行時域和頻域分析,因此需檢視配線系統、MDI,以及測試夾具和測試配置要求。
實際的MDI連接器並非符合標準的配置,但有一些嚴格的規格,可將MDI和纜線之間的交互作用降到最低。圖4顯示H-MTD連接器範例,可用於多Gigabit汽車乙太網路,也可用於新興的SerDes標準。
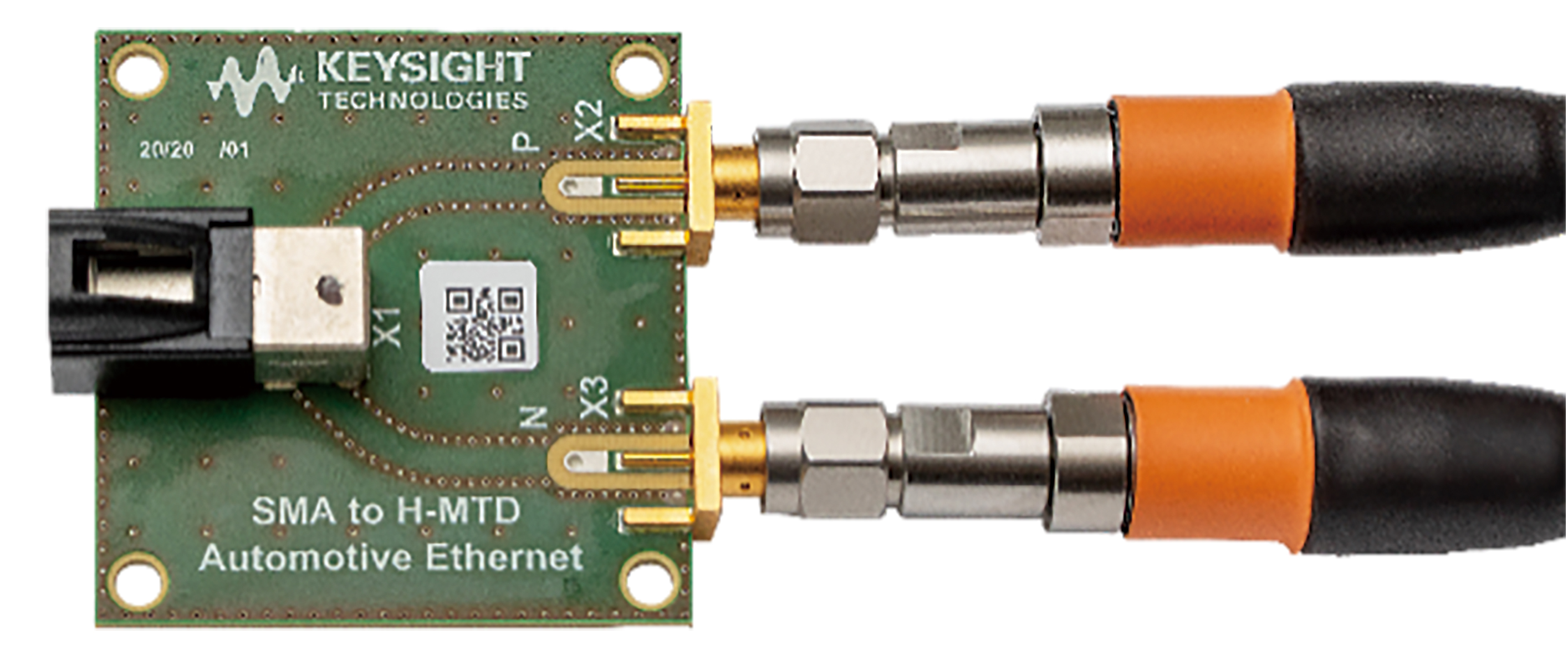 圖4 具H-MTD和SMA介面的MDI連接器
圖4 具H-MTD和SMA介面的MDI連接器
檢視通道測試結果時,請留意一些誤差,例如:阻抗不匹配、訊號失真或缺陷,以及纜線之間的串擾。
接收器解決量測誤差
接收器負責分析透過鏈路傳送的資料,然後將其傳送給ECU或顯示裝置,以進行進一步的處理。接收器若出現位元誤差,將導致來自攝影機、雷達和光達等安全感測器的資料遺失或損壞。
接收器越來越難以提供像是PAM-4這樣複雜的調變功能,特別是在暴露於大量雜訊源的長通道上傳送訊號時。為了分析接收器的功能,必須在具有多個雜訊源的情況下量測誤差位準,包括:窄頻干擾、大電流注入、暫態在線、外部纜線束串擾。
所需的量測配置應包括雜訊源、放大器和耦合電路,以便將精確位準的雜訊,注入正在使用中的SerDes鏈路。接下來可以查詢待測物的訊號品質暫存器,以驗證接收器在充斥雜訊的情況下,是否能正確解讀符碼。接收器測試的重點是,對接收器進行壓力測試,確保它能維持所需的誤碼率(BER)速率。
車載網路進行測試提升車用安全
隨著攝影機、網路連接,以及感測器的數量增加,加上汽車駕駛人需要更精準的準確度、減輕重量以及提高安全性,車載網路必須能夠平順無縫地處理這些要求,並克服伴隨而來的挑戰。同時,也必須對車載網路進行測試,確保它們具備互通性和安全性。
(本文作者Carrie Browen為是德科技自駕車業務部產品經理;Kevin Kershner為是德科技數位解決方案系統架構師)