行動聯網裝置改變人們的生活:除智慧型手機外,還有集數據蒐集與處理能力和無線連接於一身的智慧型手表、健身追蹤器和聽戴式裝置。
動作感測器對這些裝置的實用和直觀的重要性常常遭到忽視。無論是調整手機的螢幕方向、計算智慧型手表的步數、匹配頭部動作XR眼鏡、或輕按耳塞來改播歌曲,動作感測都是使用者體驗和介面的關鍵環節。
嵌入式裝置工程師選擇和整合動作感測器的難度很高。如何兼顧準確度所需的正確技術,以及隨之而來的高成本或大功耗?如何充分利用感測器,以免錯過可以改善最終產品性能或功能的機會?
動作感測器入門
首先針對動作感測器作個簡單的歸類。感測器有三種:加速度計、陀螺儀、和磁力計。加速度計測量包括重力加速度在內的各種加速度。重力加速度指的是感測相對於感測器的重力,意即向上的方向。陀螺儀則藉由測量角速度測量角位置的變化。
加速度計和陀螺儀各有三個自由度(軸),兩者結合就成為一個6軸動作感測器或慣性測量單元(IMU)(圖1)。許多應用還要加上磁力計,來感測用於估計前進方向的地球磁場強度和方向。加速度計和陀螺儀搭配3軸磁力計就成為9軸IMU。
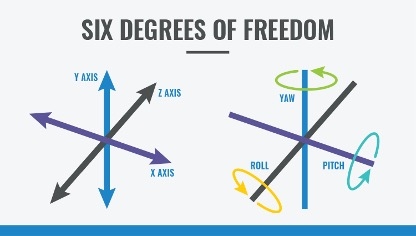 圖1 用IMU進行動作感測
圖1 用IMU進行動作感測
圖片來源:CEVA
本貼文重點在討論IMU。由於其中某些部分也可應用於加速度計、陀螺儀、或磁力計,因此也會說明結合其中至少兩者的難度。
精準度
以這些理論為基礎,接著探討如何應用這些理論以及如何達到所需的準確度?
對於IMU,裝置前進方向所需的準確度可作為裝置本身首要的條件。某些IMU的要求可能在1到2度之內,其他應用的準確度則可略微降低。例如,XR頭戴式耳機的準確度要求就比機器人玩具高出許多;其次應該考慮準確度數據的穩定性,以及是否會隨時間和溫度變化。
IMU需要搭配感測器融合才能達到最高的準確度。基本概念是組合多個感測器的數據來產生優於個別數據的整合體。IMU的每個感測器各有其優缺點,個別解決方案需要截長補短多個IMU。
感測器融合基本上可視為一種「信任」的應用,意即對個別感測器數據的準確性和相關性,必須有合理的可信度。就像負責制定政策的國家總統,雖然有經濟、健康、和軍事各方面的顧問提供情報,但他們都只負責個別的領域,也只能猜測自己的意見對別人的影響,只有總統能處理並融合各方意見作出最佳決策。
同樣地,可以採用2~3個IMU「顧問」,如加速度計、陀螺儀、甚至磁力計等來提供方位數據—陀螺儀的功能最容易了解,像消費等級的陀螺儀可以產生可靠的短時距(幾秒鐘)內方向的變更,但其輸出則可能耗時至少數十秒;加速度計有助於測量長期重力,但可能與行車中固定加速度等因素混淆;磁力計在鄉村或森林等穩定的磁場環境中相當可靠,但在例如鋼骨辦公室中有電磁干擾的情況下則準確度欠佳。簡而言之,陀螺儀的短期測量相當準確,但加速度計和磁力計則在長期測量勝出,融合並準確判定裝置的方向必須權衡三者的局限性。
感測器融合可合併和比較9軸IMU的多個感測器輸出來提高準確性。例如,感測器融合軟體如具有偵測電磁干擾所導致磁力計輸出錯誤或突變的演算法,就可以自動提高對加速度計和陀螺儀數據的信任度,直到磁力計恢復穩定為止。
採樣率對於準確性也很重要。感測器數據頻率是否足以滿足需求?這當然取決於個別的應用。例如,陽春型計步器的數據頻率只要每秒幾個讀數即可,但大多數應用的頻率可能要到100Hz至400Hz,至於XR(虛擬、混合、和增強實境的統稱)應用所需的精確頭部追蹤,其採樣率可能必須高達1kHz以上。快速採樣率對低延遲也很重要。以頭部追蹤為例,採樣率高低是沉浸式VR體驗與「暈機」的關鍵因素。
校準是另一個要考慮的重點。大部分感測器出廠後,所能做的大概就僅限於規格表所列的項目。任何校準都有助於大幅改善不同感測器之間的一致性。工廠校準可以有效提高個別效能,但所費不貲。也可採用現場動態校準,但需要充分掌握感測器或至少應用本身的需求。某些感測器錯誤如未妥善處理,其負面影響有可能對總體輸出本身已有的錯誤火上加油。
最後還需要考慮如何驗證融合後的感測器數據。雖然這取決於所要追蹤的對象,但基本原理是用另一種獨立的數據源來核對所產生輸出的真實性。例如,利用機械手臂精確且重複地移動到的某個已知點,來查核感測器的位置數據輸出是否相符。如有誤差產生,可以通過計算進行補償,或判定為需要進一步改善的錯誤。
實現新功能
高準確度動作測量不僅有助於現存應用,還可為行動裝置提供新功能。以聽戴裝置為例,傳統的使用者介面陷入兩難的困境:一方面,使用者不喜歡拿出手機以便在手機上進行控制操作,而另一方面,裝置本身又太小,以致無處可放易於操作的按鈕。解決之道是用輕拍裝置來跳過一首歌,以及在將裝置從耳中取出時自動靜音(因為不論如何都應該要靜音才對)。動作和識別不同動作之演算法的「分類器」,因此能提供使用者更便捷和直觀的體驗。
行動裝置採用動作感測器的準確數據後,還能進一步感知周遭環境動態以及使用者本身的動作(意即所謂的意義感知),以便提供更身臨其境的體驗。例如在走近十字路口人行道時自動降低音量,以避免漏聽附近救護車的警報聲。
對於健身追蹤類的產品,高準確度數據可用於區分不同的使用者動作。例如,計步器可以量測步幅、步速、以及其他行走特徵,來判定正常步行或上下樓梯的差別。結合氣壓和GPS定位等其他感測器數據,產品的軟體可以生成詳細的運動軌跡並估算所耗的熱量。
整合:感測器融合及軟體
只靠提供原始數據無法充分推升動作數據的準確性和實用性到極致。裝置本身還需要處理數據、補償系統誤差、合併來自多個感測器的數據。 所涉之處甚多,以致感測器融合非常複雜,且需要相當程度的專業知識才能在有限空間內獲得最佳效果(圖2)。市面上已有整合必要感測器及處理能力的多種產品可以採用,如博世(Bosch)和CEVA Hillcrest Labs合作開發的BNO080/085即為其中一例。
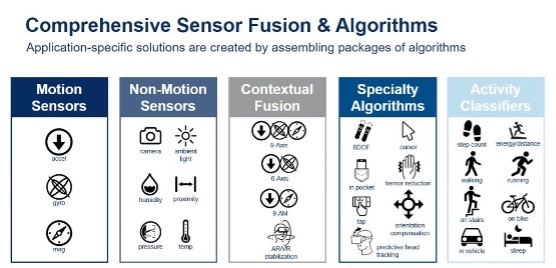 圖2 完善的感測器融合及演算法
圖2 完善的感測器融合及演算法
圖片來源:CEVA
實時融合這些數據不但很困難且需要大量的處理能力。在感測器裝置本身的MCU核心上運行這些演算法或其部分的整合式感測器,可能優於單靠主應用處理器一手處理各項事務,尤以對計步器等需要「隨時執行」任務的裝置為然。此一情形下,主處理器毋需為了感測動作而時時被喚醒(意即可以保持睡眠狀態),進而減少總體功耗並延長電池壽命。以先前總統制定政策的例子推演,專用於感測器融合的SiP就像授權副總統處理某些事務,以便總統(主處理器)集中心力於更急迫的工作。
動作感測器在許多應用中都舉足輕重,困難在於如何選擇合適的裝置、達到應用所需的(或必須達到的)準確度。不同的應用需要不同的準確度,甚至不同的數據類別亦然。
整合式感測器和感測器融合通常足以為這類問題提供解決方案。與適當的供應商合作,不但可以獲得準確可靠的數據以及特定應用所需的加值功能,還能將成本和功耗壓到較低水準。
(本文作者為CEVA感測器融合事業群資深行銷專員)