超寬頻(UWB)是一種射頻無線技術,可以增強先進駕駛輔助系統(ADAS)和聯網自動駕駛汽車(CAV)的感測器套件功能。導入超寬頻技術可避免致命性的碰撞,確保實施可靠的車聯網(V2X)連接,進而挽救更多的生命。
科技進步正在改變日常生活,並對各產業產生重大影響。汽車產業也不例外,不斷採用新技術來提升消費者體驗、安全性和安全保障。然而,當今最令人擔憂的問題之一是嚴重的交通碰撞事故,而這個問題可以應用科技來解決,進而挽救生命。目前業界正在從多方面努力來確定、開發、標準化和實施最適合的技術,以提升道路安全。最初,汽車製造商在車輛內部使用獨立的ADAS技術,比如雷達和攝影機,在利用這些技術下,每家汽車製造商都可以實現自己的系統,毋需標準化。
汽車安全領域的下一個重大提升將是車輛共享資訊,使車輛之間能夠相互協作。這就需要標準化,以確保不同製造商汽車之間的連通性,目前正在努力透過實現V2X連接標準化,包括車對車(V2V)、車對基礎設施(V2I)和車對行人(V2P)協定,為聯網汽車奠定基礎。正因為V2X標準化工作採用新技術,增強ADAS和CAV感測器套件的功能開闢了一條捷徑。
超寬頻是一種低成本的射頻技術,可精確測量兩點之間的距離。採用UWB加上V2X堪稱形成天作之合,並實現標準化以增加精確定位、安全識別和高更新率下的超低延遲等功能。本文將重點介紹UWB加上V2V、UWB加上V2P的幾個能夠挽救生命的關鍵應用。其中值得一提的是,在很多應用中,UWB加上V2I還可以大幅提高消費者便利性,例如自動代客泊車、對準電動汽車充電器。
超寬頻技術特性
IEEE 802.15.4z為用於安全測距的超寬頻標準化提供規範。該標準的安全性要求確保距離測量的準確性,而且不會被外部來源欺騙。超寬頻安全測距的工作原理如下:首先測量非常窄的射頻脈衝從發射器傳到接收器所需的時間,然後用這個「飛行時間」乘以光速就可以得出距離。窄脈衝使系統能夠準確瞭解多路徑干擾並選擇第一條路徑,確保識別最近的物體。
許多脈衝組合在一起形成幀。每個安全測距幀都包含一個加擾時間戳記,其採用加密技術建立,以確保距離測量的可靠性。單個幀可以在200微秒內完成傳輸。幀在一個組內所有節點的收發器之間來回發送,系統對所有節點之間的往返距離進行測量。對於簡單的單邊、雙向測距操作,往返測量可以在1毫秒內完成,更新速率為每秒1,000次。
超寬頻的工作頻寬大於500MHz,如果配合使用適當的訊號處理技術,就可以提供精確到10公分的距離測量。所有這些功能都可以在單個低成本互補金屬氧化物半導體(CMOS)元件上實現。
協同駕駛
汽車產業開始展望其聯網未來,迎來協作式自動駕駛的新時代。這包括交通號誌、十字路口、車輛編隊和換道等應用場景。這些使用案例要求知道車輛的相對位置。在某些情況下,精確度要優於1公尺,甚至達到10公分。透過共享準確的定位資訊,車輛可以協同工作,以比人工操作更安全、更快的反應時間執行這些功能,讓車輛在極少或沒有人為干預的情況下運行。
V2V通訊的基本功能之一是美國所推行的基本安全訊息(Basic Safety Message, BSM),或歐洲推行的協作意識訊息(Cooperative Awareness Message, CAM)。這些消息包括車輛位置、速度和方向等資訊,根據這些粗略的位置資料,車輛的自動導航系統(ANS)可以確定附近有哪些其他車輛,然後可以組成小組進行協同操作。
在複雜的聯網車輛協同操作中,必須保持適當的距離,以避免車輛之間發生致命的接觸碰撞。5G汽車協會(5G Automobile Association, 5GAA)是致力於開發未來聯網移動和智慧交通解決方案的全球性組織,該協會認為精確定位是需要解決的關鍵問題之一。保持車輛間距需要能夠以快速更新率提供精確位置測量的技術。
超寬頻可以實現這一功能,精確度可達10公分,這也是該技術得以在全球範圍內發展的原因之一。超寬頻還可以透過防止車輛與腳踏車、摩托車及行人等弱勢道路使用者(VRU)發生碰撞來保障生命安全。超寬頻在許多消費類產品和應用中迅速普及。很多先進手機都採用了超寬頻技術,這項技術也開始應用於汽車中,使手機能夠充當安全的數位車鑰。
如果車輛和手機中的超寬頻可以共同用於保障生命安全,豈不是更棒?如果車輛能夠與行人的手機(V2P)通訊,並使用超寬頻測量兩者之間的距離,那麼就可以避免車輛與行人發生碰撞。超寬頻可以透過防止惡意矇騙來提高通訊的安全性,這是聯網自動駕駛汽車非常關切的一個問題。透過驗證車輛的身分和位置,超寬頻可以驗證通訊對象是目標車輛,而不是出於惡意目的冒充該車輛的某人。
最近的報告表明,代價高昂的基礎設施勒索漏洞攻擊帶來的影響,已損害了許多系統並導致服務中斷。讀者是否可能想像開著一輛聯網自動駕駛汽車在高速公路上行駛時,卻收到勒索要求給錢,否則車輛可能會撞毀的情形?
超寬頻應用於超大物體
大多數有關超寬頻的文獻都偏重於測定與小物體之間的距離。但當超寬頻應用於車輛等大型物體時,僅知道與車輛上某一點之間的距離是不夠的。在車輛移動的情況下,測距必須是相對、連續的,並利用多個超寬頻感測器,每輛車可以連續計算出另一輛車所有四個角的相對位置。在本文餘下的部分裡,位置一詞將指相對位置。
對於協同操作,自動導航系統可以識別適當的車輛,並使用V2V鏈路組成一個小組。組成一個小組後,自動導航系統將識別、初始化並開始用適當的超寬頻感測器進行持續測量,同樣使用V2V鏈接。圖1顯示了兩輛車拐角附近的超寬頻感測器如何形成交錯排列。在每輛車的前、後和側面各安裝兩個感測器,就可以確定兩輛車的位置和方向。每個超寬頻鏈路都提供了一種獨特、安全測量精確距離的方法,並支援資料通訊。資料通訊可以透過交換更多詳細資訊來進一步加強安全。
 圖1 使用超寬頻交錯連接的兩輛車
圖1 使用超寬頻交錯連接的兩輛車
實現高速安全駕駛
在涉及多輛車的高速駕駛過程中,確保聯網自動駕駛汽車無故障運行至關重要。一個常見的例子是車輛編隊(圖2),幾輛車以緊湊的隊形行駛,相互牽引以節省燃油。車輛編隊有助於貨運產業提高安全性,同時降低燃油成本和排放,並減少擁塞,更快地運輸貨物。車輛編隊還可以幫助在電池容量有限的情況下大幅地增加電動汽車的續航里程。
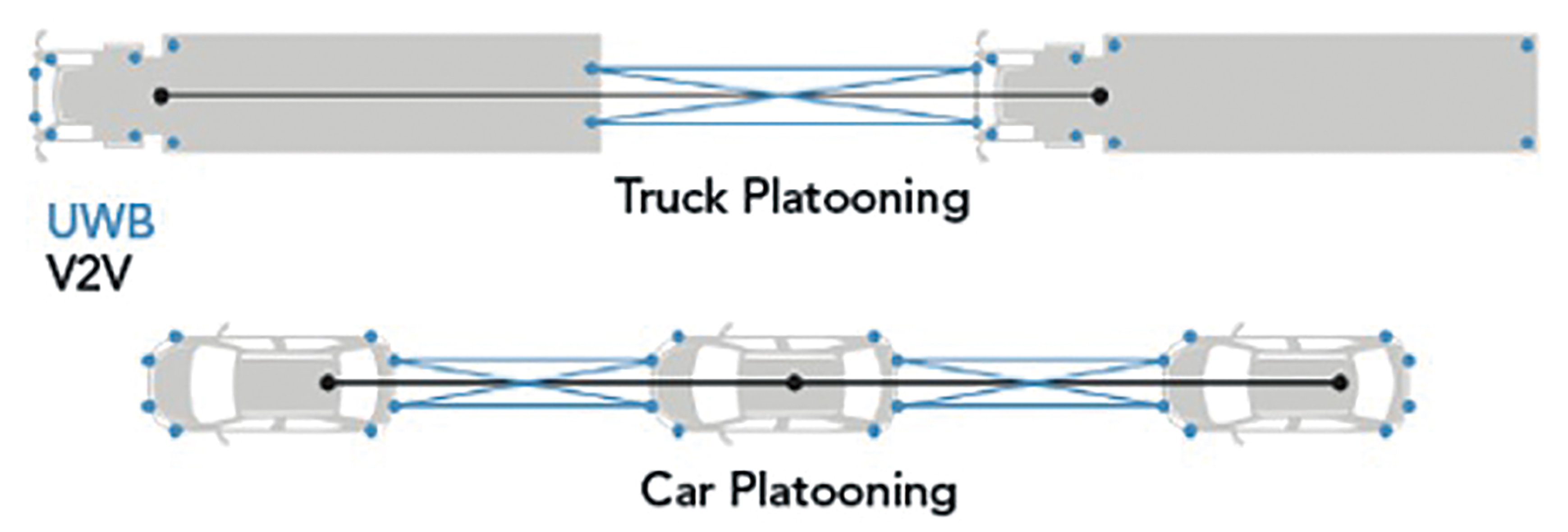 圖2 車輛編隊使用超寬頻技術來保持距離和方向
圖2 車輛編隊使用超寬頻技術來保持距離和方向
超寬頻鏈路使編隊車輛能夠準確測量彼此之間的距離,並保持適當的距離和方向。在編隊中,每輛車以很近的距離跟隨另一輛車。反應時間至關重要。假設編隊以每秒60公尺的速度行駛,車輛之間的間距為6公尺,如果領頭車輛突然踩下煞車,編隊內的車輛必須在100毫秒內做出反應,以避免發生碰撞,透過超寬頻則可輕鬆實現。
在多對多超寬頻架構中有四個感測器,一輪測距應在10毫秒以內完成,確切時間取決於具體的實施情況。一輪測距是指四個感測器測量圖2所示的四個距離所需的時間。對於以每秒60公尺的速度行駛的車輛來說,10毫秒的一輪測距時間意謂著車輛在兩條訊息之間只能行駛60公分,才能使每輛車有足夠的時間對領頭車輛的速度變化做出安全的反應。多個超寬頻鏈路使編隊車輛能夠彼此保持正確的方向,這可以使每輛車的自動導航系統在彎道上跟隨領頭車,與領頭車保持在同一條車道上。
車輛跑道變換
變換車道是聯網自動駕駛汽車從超寬頻感測器中獲益的另一個過程。車輛需要變換車道的情景,包括從入口匝道進入高速公路或加入編隊中。圖3顯示了一輛車需要加入另外兩輛聯網車輛中的情形。自動導航系統首先使用V2V建立連接,形成一個小組並傳達車道變換需求。然後,系統將確定該操作所需的超寬頻感測器,初始化這些感測器並啟動連續超寬頻感測(圖3a)。
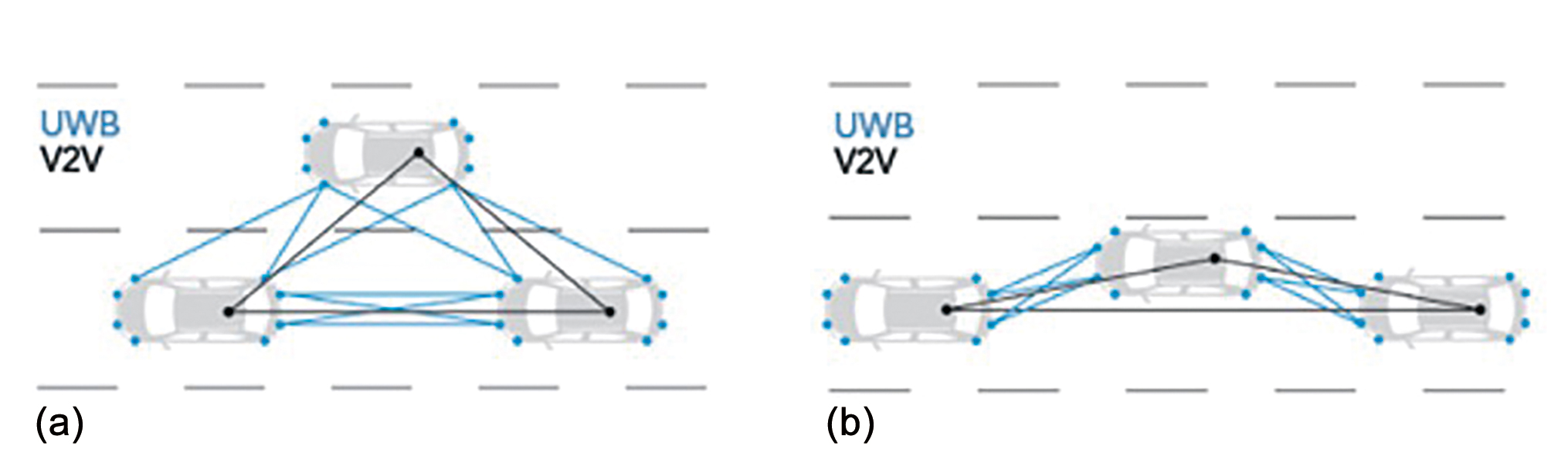 圖3 一輛車在換道(a)前使用V2V和超寬頻技術加入一個車隊,然後完成了換道(b)
圖3 一輛車在換道(a)前使用V2V和超寬頻技術加入一個車隊,然後完成了換道(b)
下一步是讓兩輛車之間留出間隙,讓換道的車加進來。然後,換道的車輛將進入其他兩輛車之間的車道,如圖3b所示。由自動導航系統決定換道所需的適當超寬頻感測器。加入編隊後,超寬頻感測器繼續工作,以調節車輛的距離和方向。
超寬頻和V2P
另一個能夠挽救生命的關鍵潛在應用是利用超寬頻藉由弱勢道路使用者的手機,或其他支援超寬頻的設備進行車對人通訊。這與V2V的工作原理類似,自動導航系統與V2P結合,可以確定附近是否有弱勢道路使用者,然後啟動超寬頻測距程序。超寬頻可以追蹤弱勢道路使用者的確切位置,並判定發生碰撞的可能性。例如,停在路口(如圖4所示的三叉路口)的車輛可以使用超寬頻感測器,來確定與弱勢道路使用者之間的距離,進而避免發生碰撞。
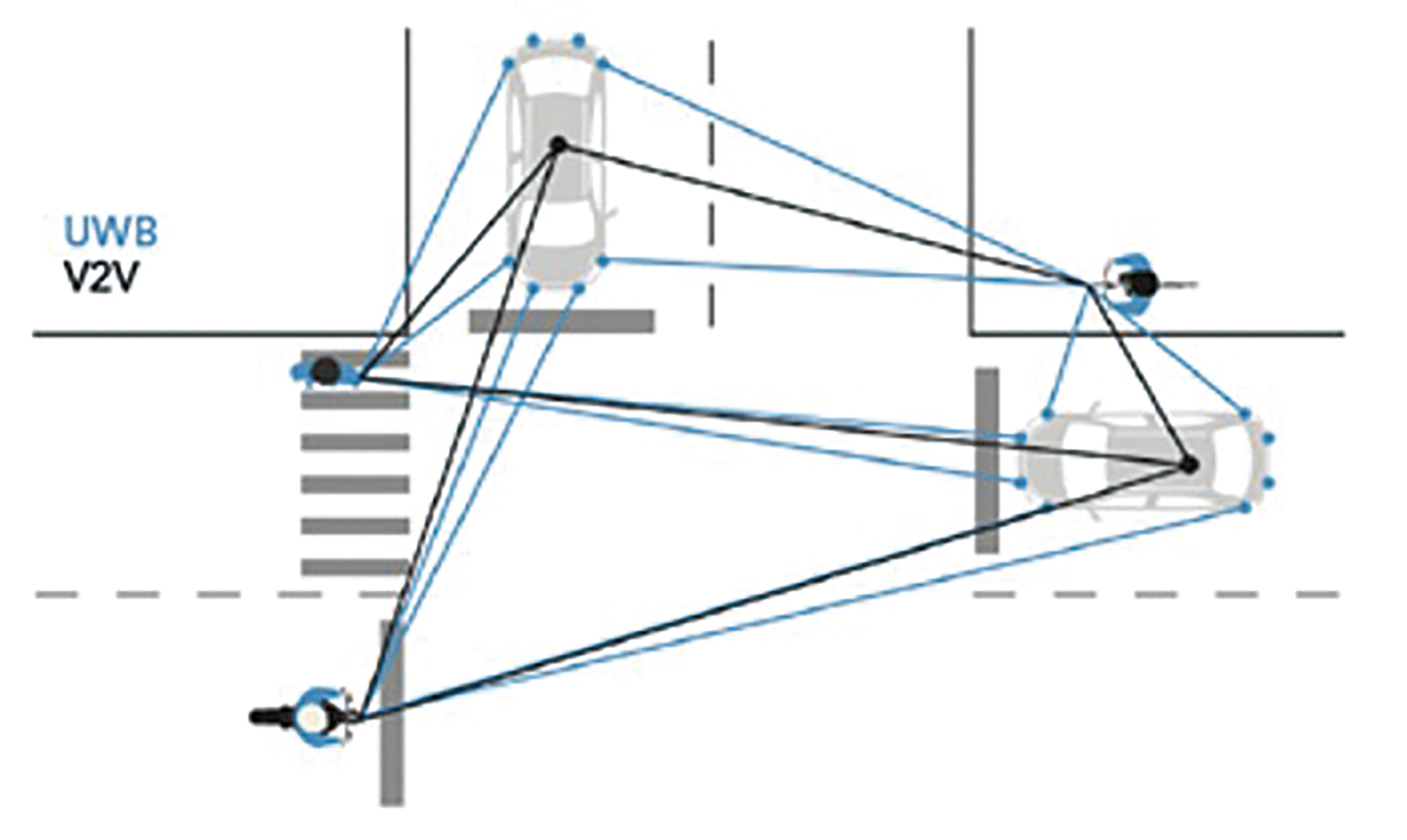 圖4 三個弱勢道路使用者(VRU)處在一個三叉路口
圖4 三個弱勢道路使用者(VRU)處在一個三叉路口
透過驗證提高安全性
超寬頻還可用於降低聯網汽車威脅場景的風險。車聯網聯盟(Car Connectivity Consortium)已經把超寬頻納入其數位鑰匙3.0規範中。該規範使駕駛人員能夠安全地使用手機來打開和啟動汽車。超寬頻可透過測量車主和車輛之間的距離來提升安全保障。確保車主在車輛附近,可以防止「中間人」實施車輛攻擊,即盜賊攔截和轉發車主手機的遠距離訊號進而進入車內。
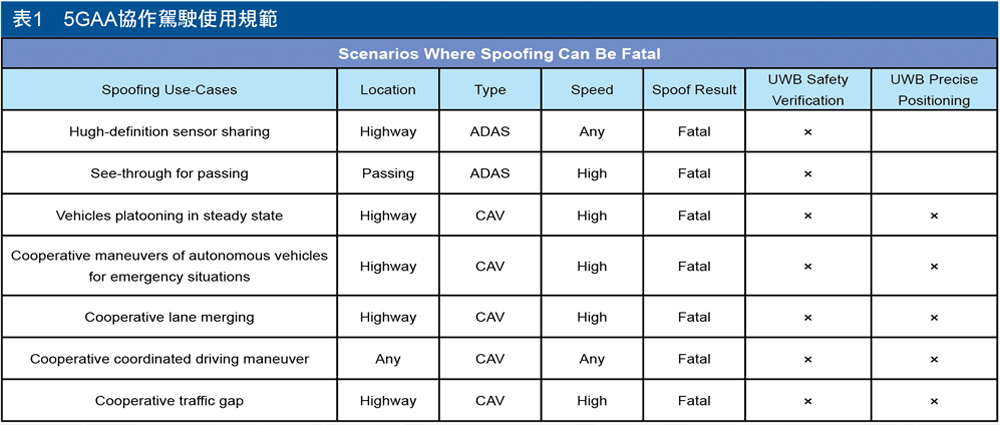
有了車對車通訊,車輛就能夠信任從其他車輛收到的資訊,這一對於確保安全至關重要。檢測行為不端者傳輸不準確的資訊,是一個重要的安全問題。超寬頻可以確保車輛知道彼此的位置、驗證彼此身分和檢測不端行為,進而在車輛之間提供所需的信任。當通訊中包含性命攸關的資訊時,這一點尤其重要。表1中的分析總結了最關鍵的5GAA協作駕駛為例,在這個過程如果資訊不準確將可能是致命的。
超寬頻感測器可用於驗證透過V2V進行通訊的車輛是否真的處於所指示的位置。如果位置與BSM或CAM中傳輸的GPS坐標不對應,那麼車輛之間的任何傳輸都會受到質疑,可以採取適當的預防措施。識別系統中的行為不端者,然後撤銷他們的認證,將有助於確保V2V系統的可信度。
圖5舉出可能發生的致命性矇騙為例,在超車車輛(PV)後方行駛的一輛矇騙車輛(SV)透過發送不正確的GPS坐標,假裝位於超車車輛的前方,進而錯誤地顯示車輛在超車車輛前方而不是後方。如果超車車輛請求查看前方路況資訊,矇騙車輛就會傳輸一張道路暢通的圖像。基於這一錯誤資訊,超車車輛將開始超車,這時就可能與迎面而來的車輛發生正面碰撞。如果超車車輛能夠使用超寬頻驗證矇騙車輛是否真的是其前方的那輛車,那麼就可以避免這種情況。
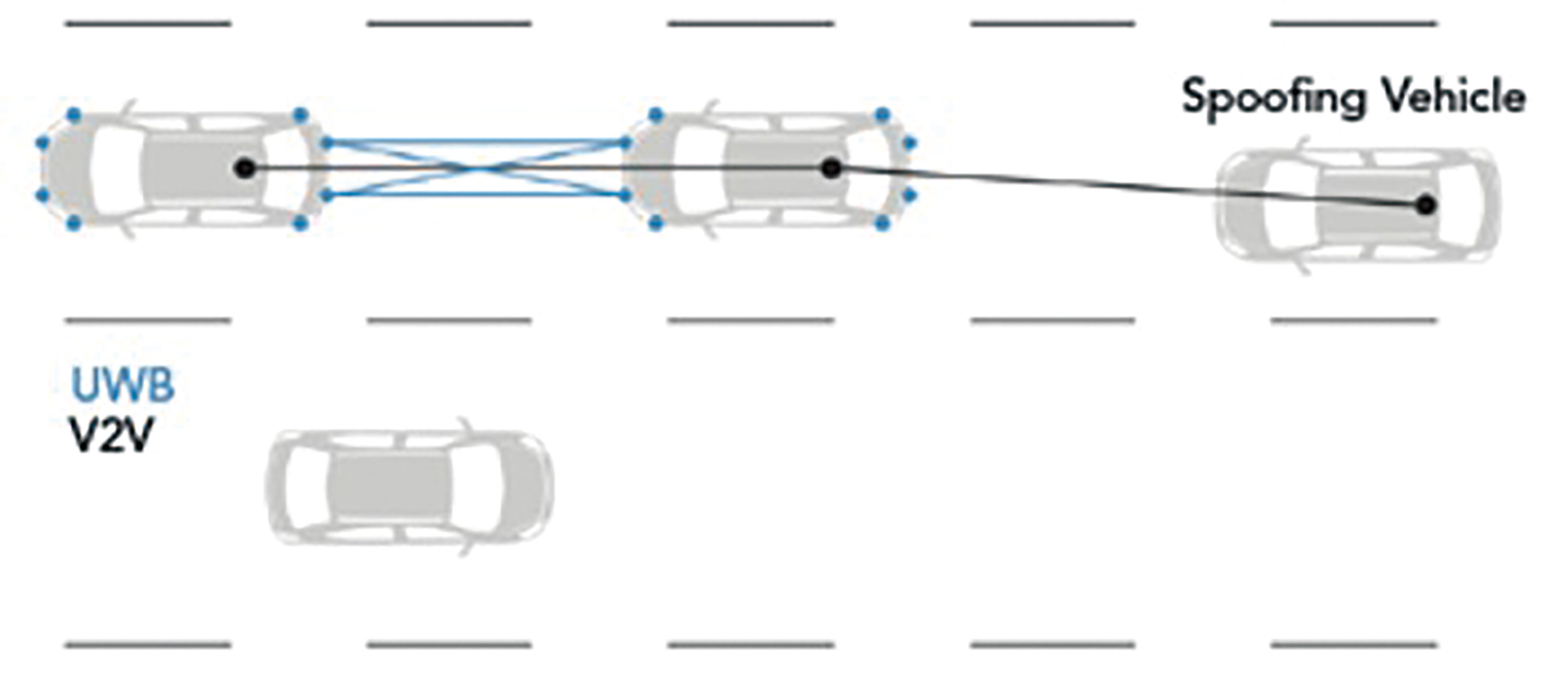 圖5 使用超寬頻檢測矇騙行為的行車場景
圖5 使用超寬頻檢測矇騙行為的行車場景
超寬頻還可用於其他情況下準確識別車輛。舉例來說,緊跟在兩輛緊挨在一起的車後面時,很難知道您的車在與哪輛車通訊,超寬頻距離測量可以幫助確認與正確的車輛通訊。另一個例子,跟在相鄰車道上並排行駛的兩輛車後面,如果其中一輛車使用即時運動學來調整其GPS坐標,而另一輛車沒有,那麼這兩輛車報告的位置可能是相同的。
超寬頻為聯網自動駕駛汽車感測器套件提供很好的擴增功能,它的高幀率能夠提供比任何其他系統都要快的反應時間。除了感測之外,超寬頻還提供通訊功能,使其能夠提供安全測距,並準確識別其他車輛。作為一種射頻技術,它在惡劣天氣下比光學系統的運行性能更好。超寬頻感測器具有小尺寸、相對簡單、低成本特性,因而可以在車輛周圍放置多個感測器。
超寬頻感測器技術簡單可行,有助於車輛更快速地處理和響應資訊。實現超寬頻安全測距所需的處理功率相對較小。如果不使用超寬頻,要想提供兩輛車的相對距離和方向的資訊,需要同時使用雷達和攝影機。攝影機需要觀察場景、分析圖像、提取關鍵特徵並確定方向。
雷達將測量車輛之間的距離,其準確性取決於雷達的分辨率和短距離性能。然後使用感測器融合將攝影機和雷達資料合併,這可能需要原始源資料和大量的3D圖像處理演算法進行組合,再提取資訊。這種系統的最大幀率可能要比超寬頻慢3倍以上。超寬頻系統的簡便性也降低了程式碼問題導致事故的概率。圖6比較聯網自動駕駛汽車感測器,在聯網自動駕駛汽車套件中導入超寬頻技術可構成一個功能強大、快速、安全、準確的系統,性價比非常高。
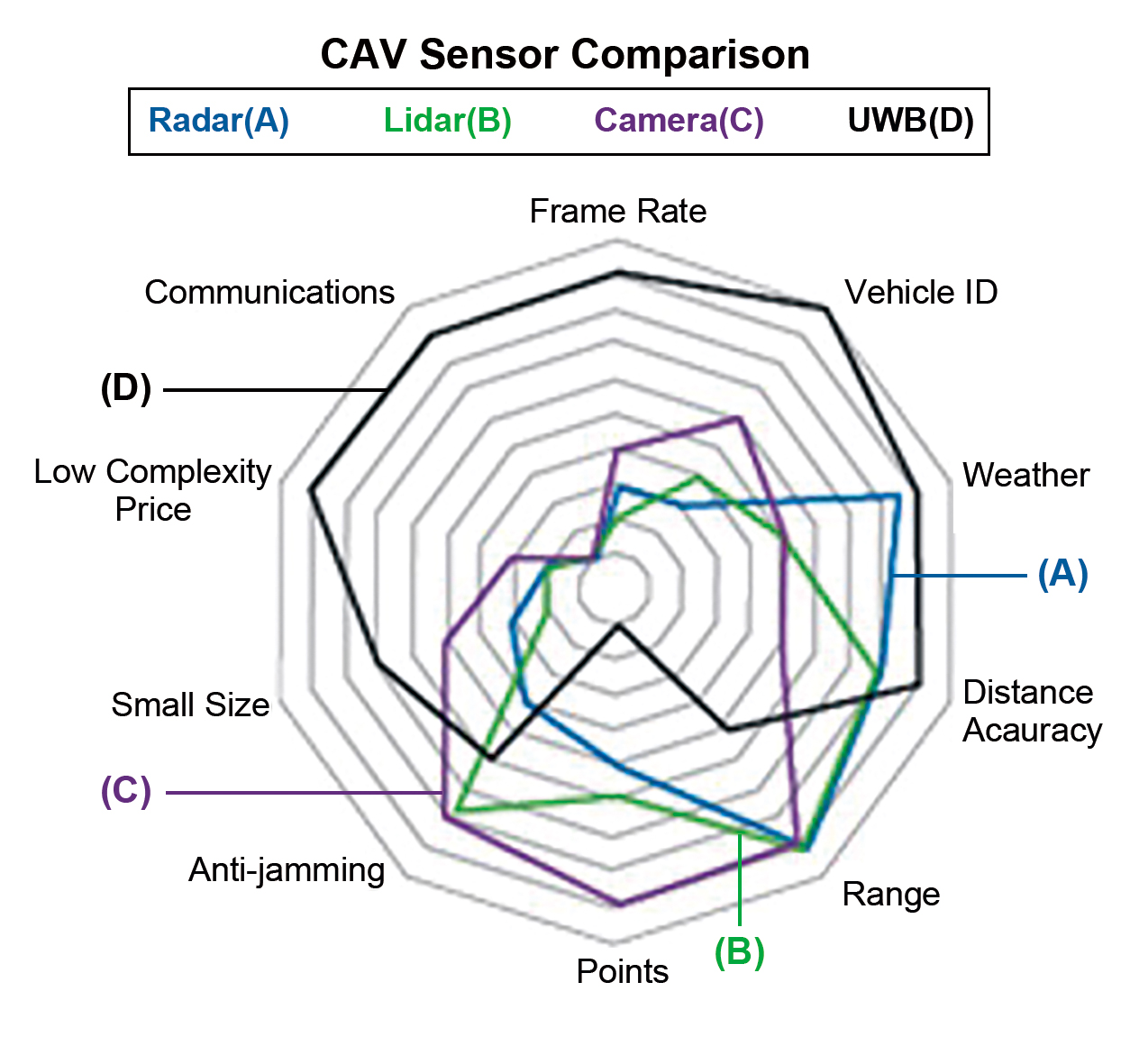 圖6 聯網自動駕駛汽車感測器比較
圖6 聯網自動駕駛汽車感測器比較
超寬頻實現安全汽車駕駛
本文討論的許多技術已經存在。802.15.4Z規範提供了一個多對多的超寬頻架構,為構建安全的多點測距區域網路(RAN)奠定了基礎。V2V定義了車輛組成一個小組的能力,這是選擇讓車輛加入超寬頻多對多RAN的基礎。一旦組成了一個小組,就需要制定規範,規定採用V2V鏈路的系統如何識別、選擇、初始化和運行安全的超寬頻RAN。
為了得到廣泛採用,需要制定標準,使不同製造商汽車產品上的超寬頻設備能夠實現互操作。有廠商如Qorvo正在努力使其正在申請專利的UWB加上V2X概念獲得採納,作為聯網汽車的一個關鍵部分率先推出。
超寬頻技術是一個比雷達或攝影機更簡單的系統,需要編寫的程式碼和處理資源要少得多。超寬頻的部署成本低、精度達到公分級、低延遲、具有很高的性價比,使汽車製造商能夠實施功能更強大的聯網自動駕駛汽車感測器套件。
聯網汽車將開啟汽車安全的新時代。實現這一目標的關鍵是在車輛之間建立一個可靠的通訊環境。超寬頻可以確保車輛知道彼此的位置、驗證彼此身分,進而在車輛之間建立所需的信任。當通訊中涉及性命攸關的資訊時,這一點尤其重要。高速協同操作是聯網自動駕駛汽車最關鍵的操作之一。
超寬頻可以提供所需的速度和準確性,使自動導航系統能夠比人工操作更快地做出反應,甚至比現有的雷達和攝影機系統還要快,進而避免出現危及生命的情況。即使是在低速下行駛,車輛操作也可能導致致命事故,尤其是涉及VRU的情況下。透過使用超寬頻測量與弱勢道路使用者之間的距離,導航系統有助於確保避免事故。
(本文作者皆任職於Qorvo)