本文協助開發使用矽光電倍增器(SiPM)的光學雷射雷達(LiDAR)系統。下文包含了以下資訊:直接飛行時間(ToF)測距儀的雷射發射器、計時和光學參數的設計和實現,以及詳細分析將SiPM整合到此類系統中時必須考慮的關鍵層面。
LiDAR是一種測距技術,越來越多地用於移動測距、汽車先進駕駛輔助系統(ADAS)、手勢辨識和3D繪圖等應用。與崩潰光二極體(APD)、PIN二極體和PMT等替代性感測器技術相比,採用SiPM作為光敏感測器有許多優勢,特別是對於移動和大批量產品而言。有業者如安森美便可提供:
1.SiPM從250奈米到1,100奈米的單光子探測。
2.低電壓—易於實現系統要求。
3.低功耗—較低工作電壓和簡單讀出電子裝置實現低功耗設計。
4.高頻寬和快速回應時間—最小化測距時間。
5.能夠利用低雷射功耗直接ToF測距技術的優勢。
6.低雜訊和高增益—可實現較佳訊噪比(SNR)。
7.標準CMOS製程—成本低,高度一致性,可擴展生產。
8.小尺寸SMT封裝—可提供1毫米的感測器。
與其他感測器相比,遷移到SiPM感測器技術會帶來一系列不同的限制。本文旨在幫助用戶充分利用該技術的優勢,並儘快實現採用SiPM感測器的工作設置。為此,安森美創建了三個工具來幫助用戶;一個用於擬真的MATLAB測距模型,一個測距展示器硬體裝置,以及本文。
首先,其創建一個直接ToF系統的詳細MATLAB模型,以便於實現使用SiPM測距應用的擬真。該模型可用於支援測距系統的設計,並可進行修改以擬真各種應用和實施。再者,一個使用SiPM的LiDAR展示系統已建成。對這個「第一代」系統進行了測量,並用於驗證MATLAB模型的擬真結果。最後透過本文協助用戶開發使用SiPM的直接ToF測距系統,討論各種系統和環境因素對所產生訊噪比的影響。
直接ToF測距系統設計
一個直接的ToF測距系統所需的基本元件,包括帶有準直光學系統的脈波雷射發射器、一個帶有偵測光學元件的感測器,以及計時和資料處理電子裝置,如圖1所示。
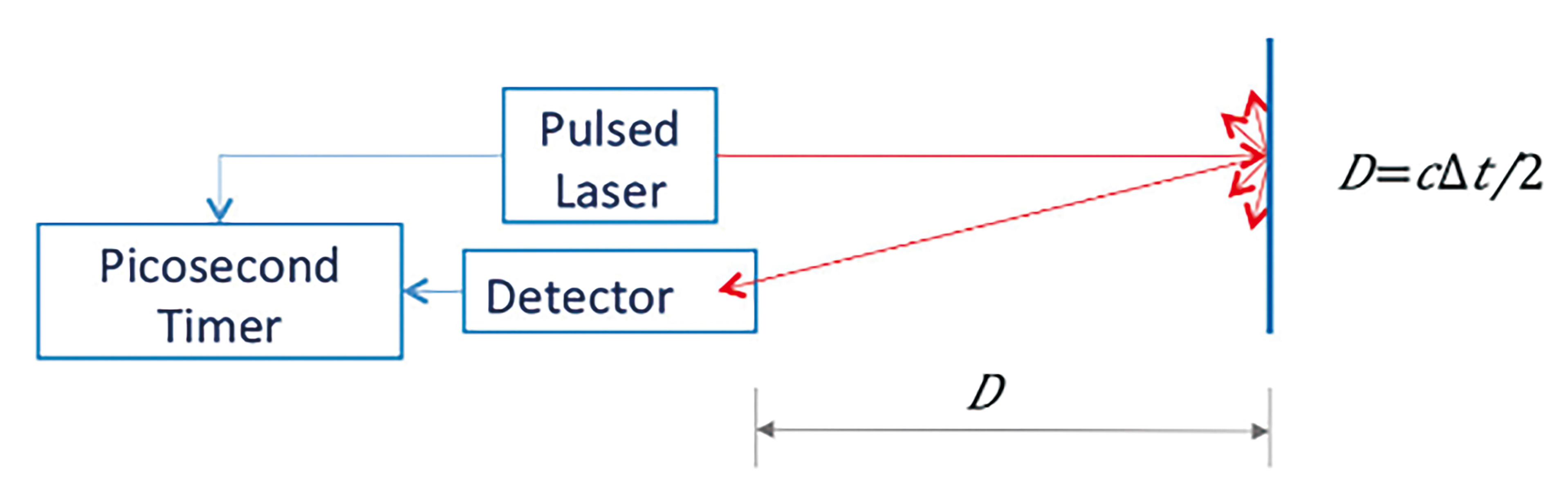 圖1 直接ToF測距技術概覽
圖1 直接ToF測距技術概覽
本文聚焦雷射發射器、感測器、讀出器和應用環境的系統設計。單點、直接ToF基線工作可以擴展到更複雜的掃描和成像系統。在直接ToF技術中,一個週期性的雷射脈波被指向目標,通常採用對眼睛安全的紅外線功率和波長。目標擴散並反射雷射光子,一些光子被反射回感測器。感測器將偵測到的雷射光子(和一些由於雜訊而偵測到的光子)轉換為電子訊號,然後由計時電子裝置進行時間標記。這個飛行時間t,可用來計算到目標的距離D,計算公式D=ct/2,其中c=光速,t=飛行時間。感測器必須將返回的雷射光子從雜訊(環境光)中區分出來。每個雷射脈波至少捕獲一個時間標記。這稱為單次測量。結合許多單次測量的數據以產生一個測量值,訊噪比可以得到極大的改善,從中可提取出偵測到的雷射脈波計時,具有高精度。
有幾種不同的讀出技術可從偵測到的雷射光子脈波中獲取計時資訊,總結如下:
測距讀出技術
.前緣辨識(LED) :
涉及對多光子訊號的上升緣的偵測。計時的準確性是由辨別返回的光訊號的上升緣的能力決定。這種技術不受雷射脈波寬度的影響。
.全波形數位化:
全波形被數位化,可以過採樣以提高精度。對於短雷射脈波或高重複率源來說,可能難以實現。
.時間相關的單光子計數(TCSPC):
提供最高的精度和最大的環境光抑制。這種技術要求每個雷射脈波偵測到的訊號光子少於一個。這種技術可以不受環境光的影響,但需要短脈波時間、高重複率和快速計時電子裝置,以實現快速和準確的測量。
.單光子同步偵測(SPSD):
TCSPC的一種形式,提供高環境光抑制。必須設計電子裝置來處理範圍模糊的問題。
直接ToF測距系統建模
創建一個直接ToF系統的MATLAB模型,該模型的框圖如圖2所示。第一步包括分析計算感測器的光照度(包括環境光和雷射),給定一個選定的光學場景,可以透過改變相應的系統參數來改變。透過比較計算出的光照度與感測器的飽和極限,可以驗證所選擇的設置是否適合測距。在特定設置不適合測距的情況下,可以透過改變系統參數來評估設置本身的改進。該模型的第二部分包括一個Monte Carlo擬真器,其中感測器的隨機特性,主要是光子探測效率(PDE)和時間抖動,被再現。這一步允許透過擬真獲得感測器的現實輸出。與分析部分相比,這一步考慮到了計時資訊,如採集時間、雷射的重複率和雷射脈波寬度。Monte Carlo擬真的結果被傳遞給一個讀出模型,通常是一個鑑別器,然後是一個時間數位轉換器(TDC),它產生一個時間戳記的柱狀圖,從中可以提取一個範圍測量。
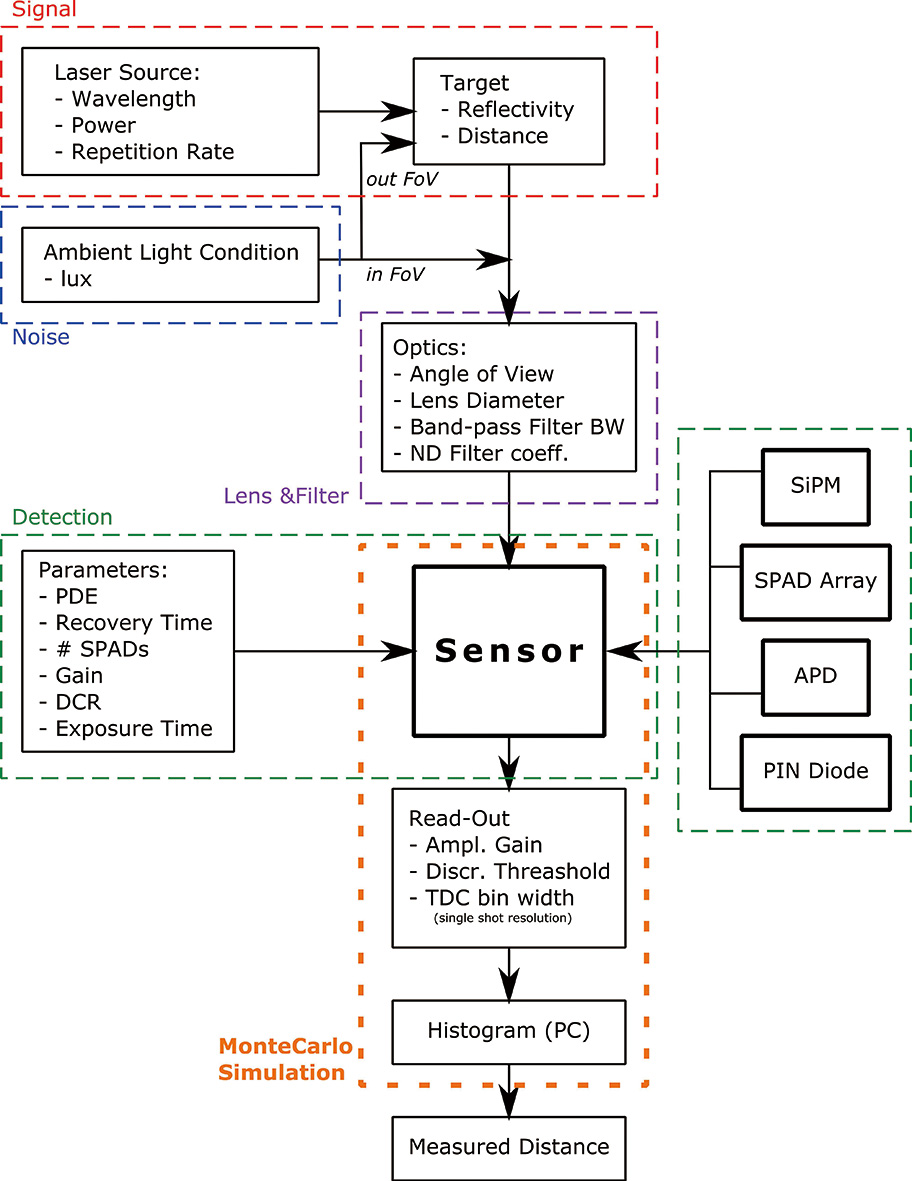 圖2 光照度的計算結合MonteCarlo擬真器,進而可以再現完整的系統輸出
圖2 光照度的計算結合MonteCarlo擬真器,進而可以再現完整的系統輸出
測距直方圖
每次發出雷射脈波時,採集系統都會進行一次單次測量。取決於許多因素,包括雷射功率和與目標的距離,每個脈波偵測到的雷射光子數量可能很低。理想情況下,每個偵測到的光子都會用時間標記。但每個單次測量的時間標記數量可能受到TDC死區時間的限制。通常情況下,許多單次測量的時間,各包含一個或多個時間標記,結合起來可產生一幀。在一幀過程中獲得的完整計時數據可以以直方圖的形式繪製出來,如圖3所示。系統測距性能受到直方圖數據品質的限制,而直方圖又受到系統參數的影響。從本文「改變系統變數的影響」一節中詳述的系統參數分析中可以看出,有一些限制因素和一些可以作出的取捨。下面使用的測距直方圖也提供了一個直觀的表示,這對於描述各種參數對所採集數據的影響是很有用的。
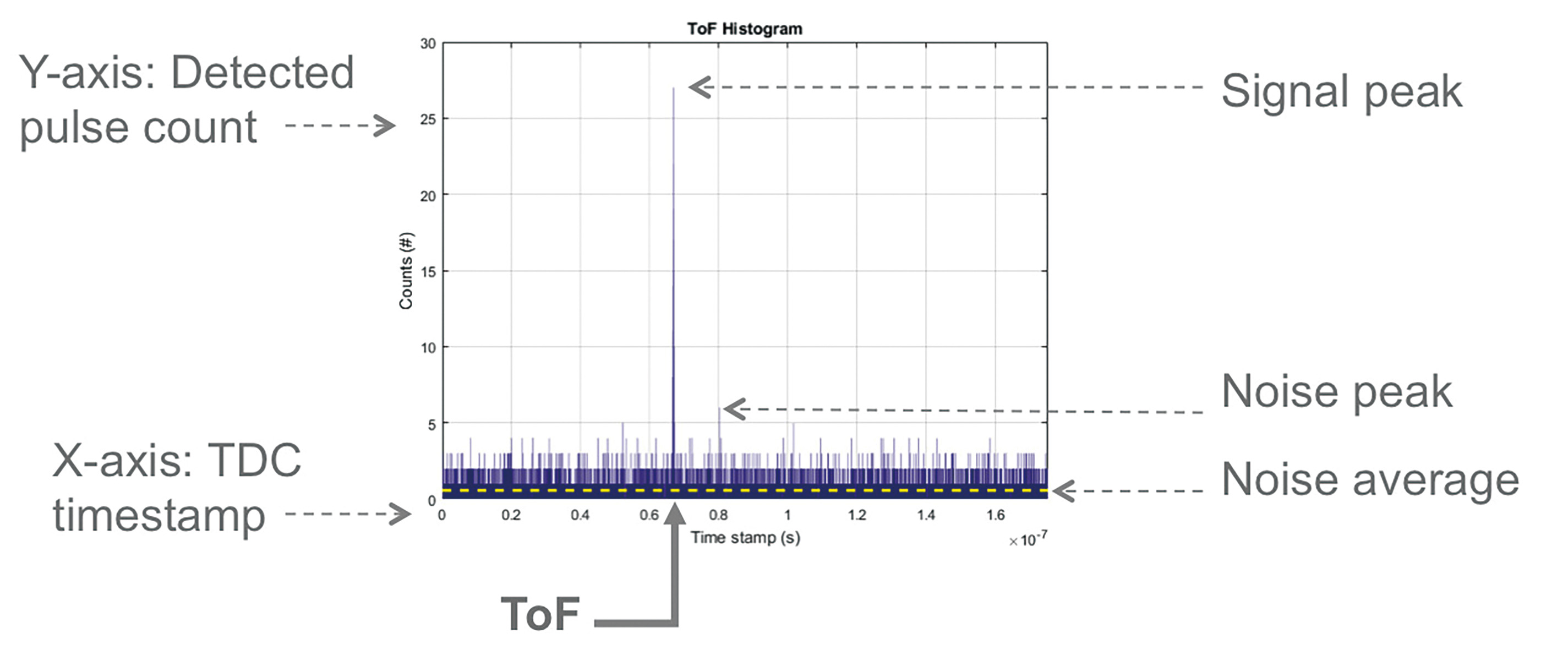 圖3 顯示訊號、雜訊和飛行時間的仿真直方圖實例
圖3 顯示訊號、雜訊和飛行時間的仿真直方圖實例
基本直方圖訊號和計時參數說明如下。
直方圖的訊噪比SNRH,是訊號峰值與最大雜訊峰值之比。SNRH=訊號峰值/雜訊峰值。
在模型中,以下術語適用於測量時間:
f=雷射頻率
雷射重複率限制了可以測量的最大ToF,無失真,這定義了每次單次測量的時間。
單次測量時間,tss=1/f
幀大小是指每張直方圖的單次測量數。較大的幀大小可以提高SNRH,產生更好品質的直方圖。測距速度由幀率定義:幀率=每秒測距次數=1/tacq
改變系統變數影響
系統設計參數將根據特定應用的要求而變化。本節的目的是利用直接ToF測距系統的模型,證明採集的數據是如何受到七個關鍵參數的影響。也體現與目標的距離和環境光照度的影響。以下各節顯示的直方圖是透過擬真得到的,可以假定每個直方圖都包括在單幀中獲得的整個數據集。為了計算速度,所顯示的直方圖對應於一個較短的採集時間。
參考直方圖
圖4顯示了在右側灰色標註框中列出的條件下,透過擬真得到的參考直方圖。這種配置被用作參考點,以顯示替代系統參數值的影響。以下分析中所使用的系統參數是為了提供一個典型的5公尺測距應用的參考點。一些參數的選擇是為了便於擬真和說明,而不是為了反映一個優化的設置。在以下各節中,只修改了一個參數,並重新進行了擬真,以說明該參數對系統採集數據的影響。
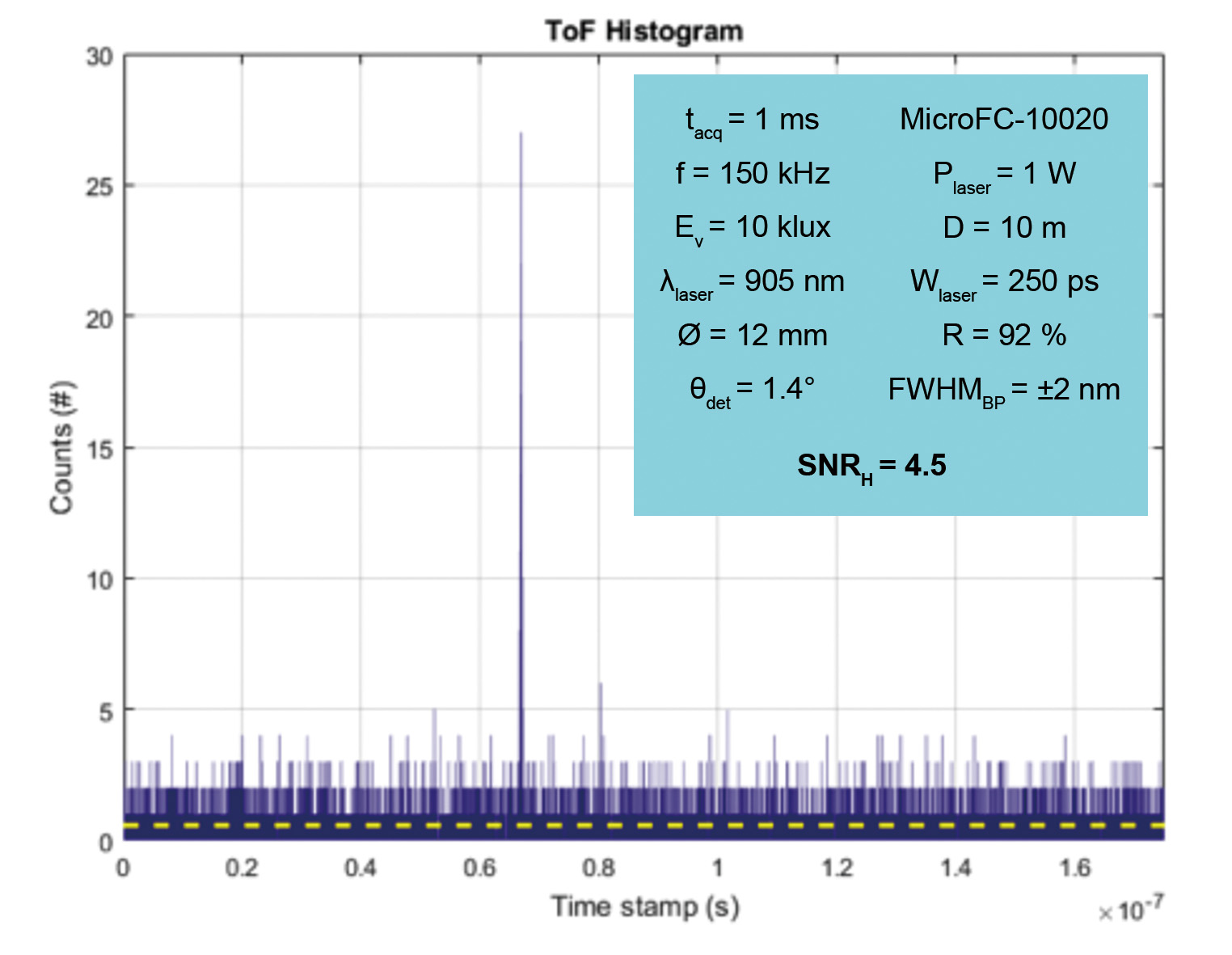 圖4 參考直方圖
圖4 參考直方圖
雷射脈波重複率
較高的雷射脈波重複率可以提高直方圖的品質,因為它增加了單次測量的次數,使得在給定的採集時間內可以偵測到更多返回的雷射光子。隨著獲得更多的雜訊計數,最大雜訊峰值也會增加。但是,由於雜訊是不相關的,總體SNRH增加。可以選擇的最大雷射重複率有一個上限,因為該重複率限制了可不失真地測得的目標距離。例如,如果300公尺是最大的測距目標距離,那麼可以使用1MHz的最大重複率。如果100公尺是最大的目標距離,那麼可以使用3MHz。
雷射脈波寬度
如圖5所示,較寬的雷射脈波寬度會導致直方圖中較寬的訊號峰值。對於方形脈波,有必要對脈波的前緣進行判別,以便只定位探測到的第一個光子的飛行時間。後續的光子並不攜帶有用的ToF資訊。因此,較短的雷射脈波是最佳的。然而,是否有合適的雷射發射器可能是實際設置中的決定性因素。
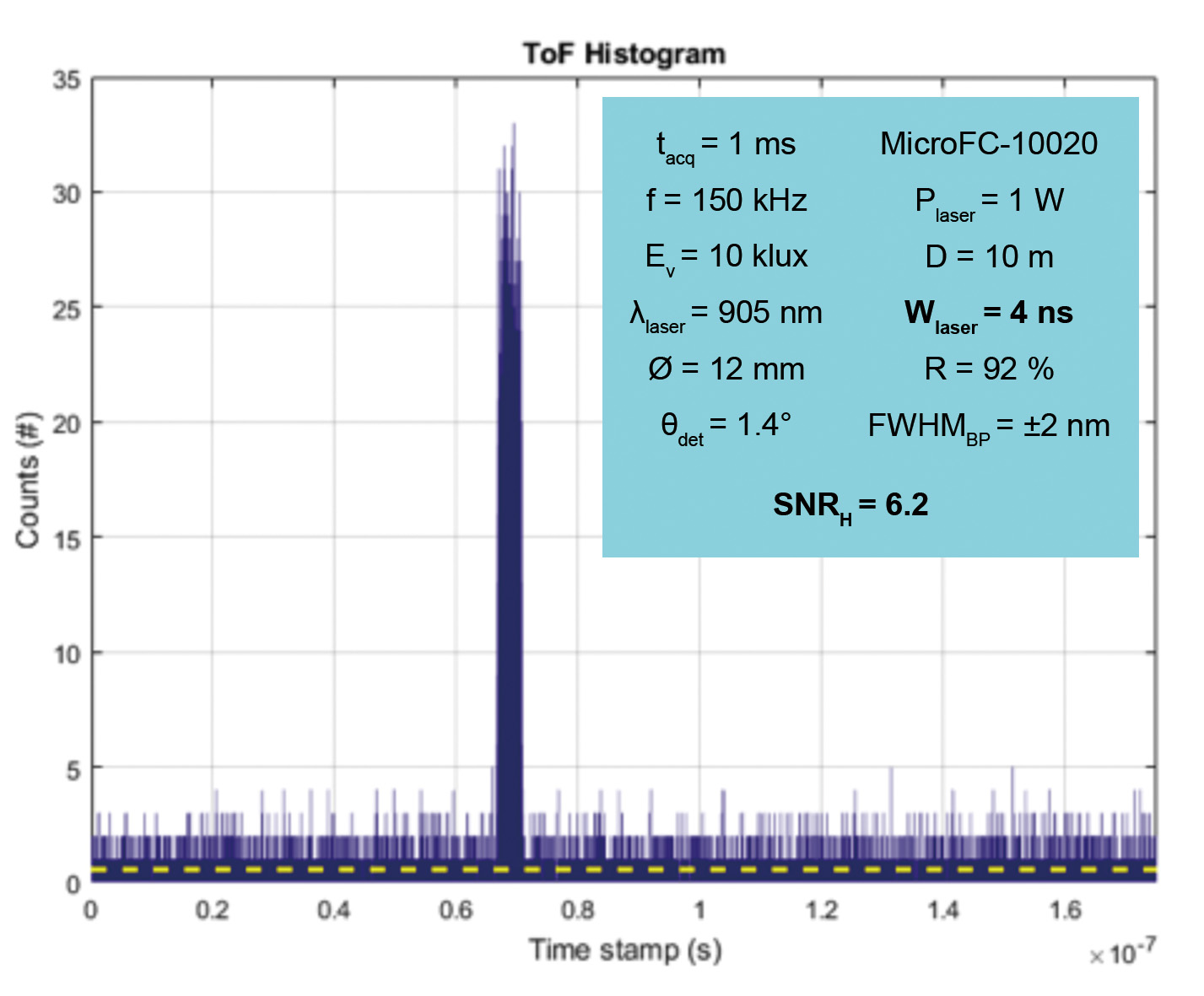 圖5 更寬的雷射脈波寬度影響
圖5 更寬的雷射脈波寬度影響
雷射波長
雷射波長的選擇受到許多因素的影響,包括眼睛安全性和是否有特定波長的低成本雷射發射器。雷射波長的選擇也會影響測距性能,因為不同波長下太陽輻照度和感測器探測效率。對於一個受太陽雜訊影響的系統,可以選擇一個較長的波長,以利用太陽輻照度在較長波長下相應減少。從圖6中的太陽輻射照度模型可以看出這種效果。在雷射波長為940奈米時,建模的SiPM的PDE從約1%降低到約0.3%。保持所有其他參數不變,雷射光子和環境光子的探測效率都會降低。對於這特定的設置,淨效應是由於總計數減少而導致SNRH的降低。當然,如果選擇另一種SiPM,在關注的波長上具有更好的PDE,那麼產生的直方圖訊號計數會更高,SNRH也會得到改善。同樣地,其他參數也可以修改,以補償減少的PDE。
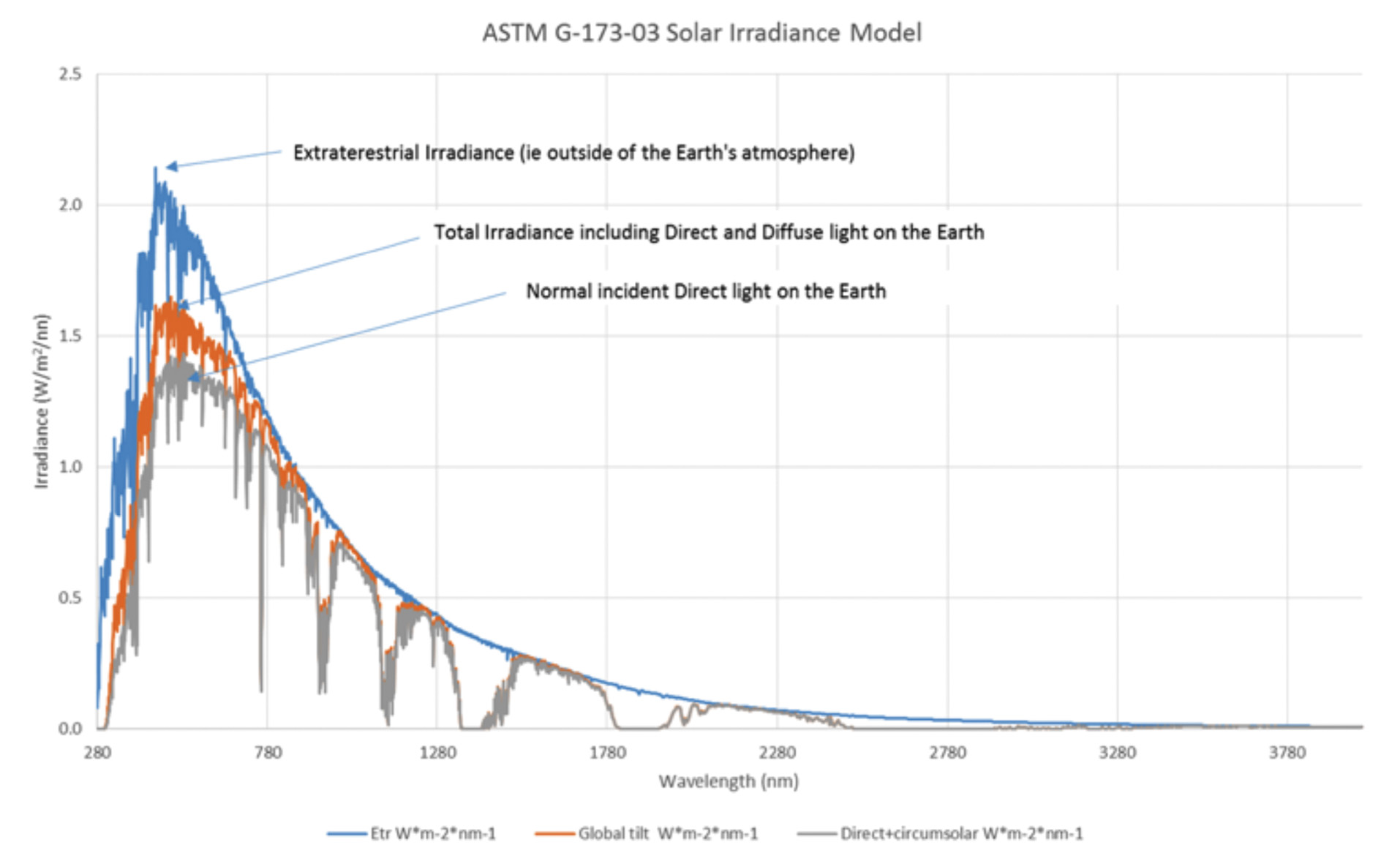 圖6 太陽輻照度模型
圖6 太陽輻照度模型
採集鏡頭光圈
當鏡頭光圈擴大時,更多的環境光子被探測到,而返回的雷射光子數量保持不變。SiPM現在很容易出現飽和,這一點從圖7中直方圖窗口開始時的大過衝可以看出。當感測器飽和時,雷射光子就不能再被SiPM偵測到,導致訊號偵測率降低,整體SNRH降低。
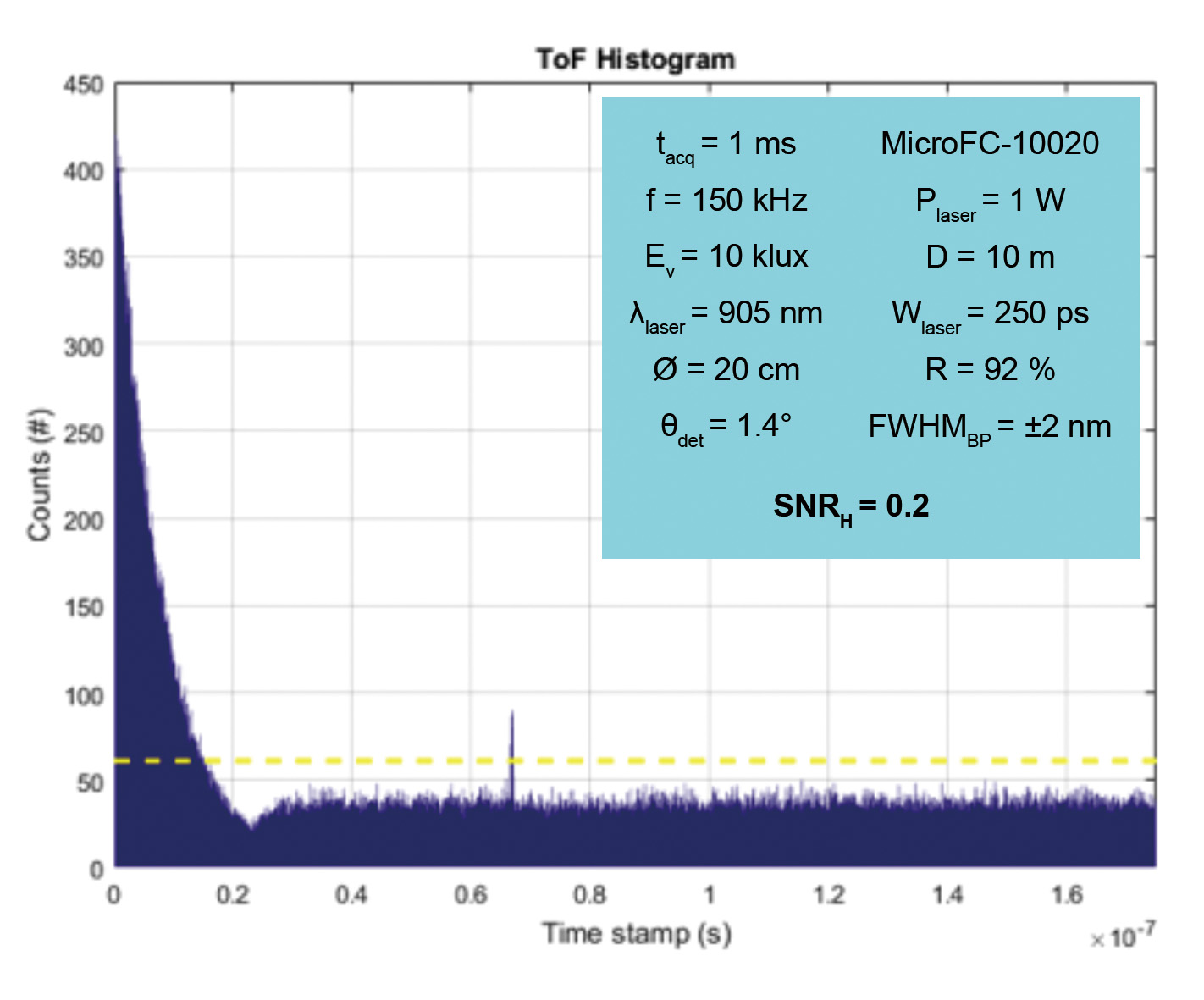 圖7 增加採集鏡頭光圈的影響
圖7 增加採集鏡頭光圈的影響
感測器的視角
感測器的視角由感測器的尺寸和採集鏡頭的焦距決定。當感測器的視角增加到20度時,入射到SiPM上的環境光會明顯增多。然後,它變得飽和,以至於系統無法辨別雷射脈波,如圖8中的情況。關鍵是要限制感測器的視角,使其只覆蓋雷射的範圍,避免這種情況。
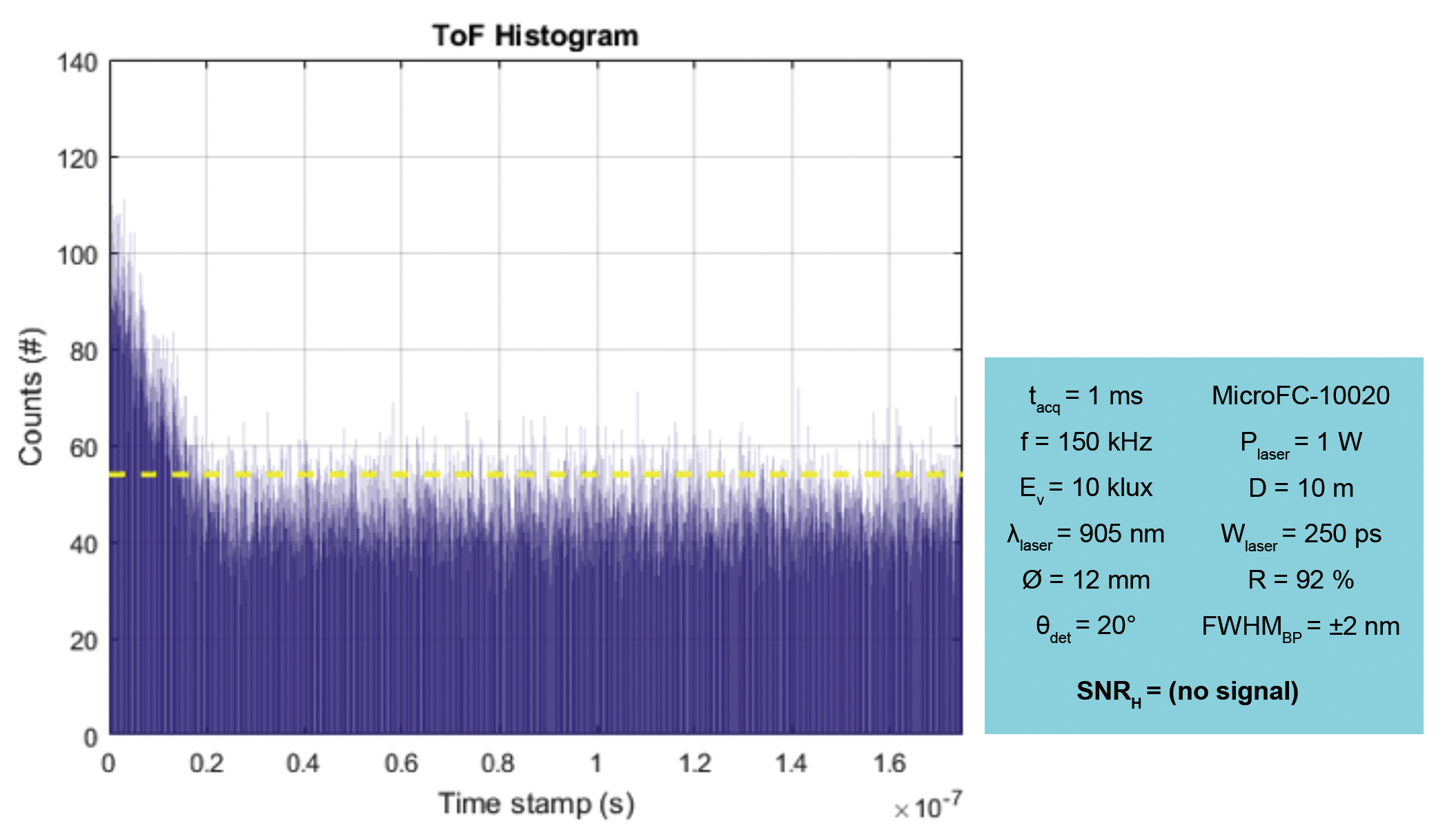 圖8 增加感測器視角的影響
圖8 增加感測器視角的影響
濾光片帶通
光學帶通濾波器用於限制由雷射波長範圍以外的光產生的環境雜訊。在這種情況下,濾光器的帶通範圍是50奈米全寬半長(FWHM)。這允許更多波長的環境光透過SiPM,增加了測量的背景雜訊,惡化了SNRH,如圖9所示。在模型中,雷射波長正好只有905奈米,獲得的雷射訊號不受帶通FWHM的影響。在實際系統中,雷射中心波長可能有比較大的差異,這可能對帶通濾波器的選擇有影響。
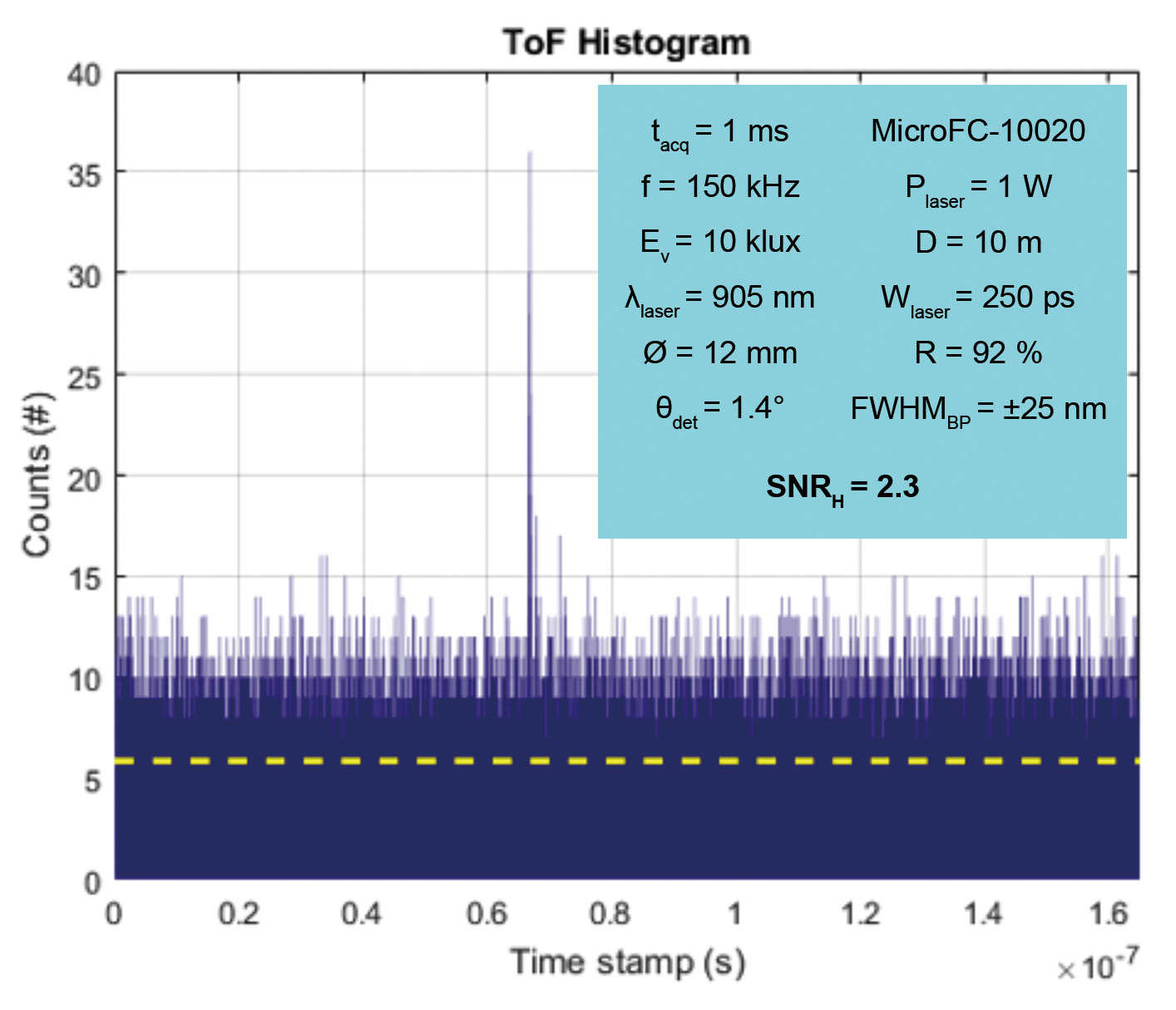 圖9 更寬的感測器光學帶通的影響
圖9 更寬的感測器光學帶通的影響
SiPM微單元尺寸
圖10中的直方圖顯示了MicroFC-10035 SiPM相較MicroFC-10020的擬真性能。主要的影響是,在關注的波長處,PDE略有增加,導致訊號略微提高,而雜訊的相應增加較小。在這個測距距離和這個配置下,SiPM的這種變化對擬真直方圖沒有顯著影響。
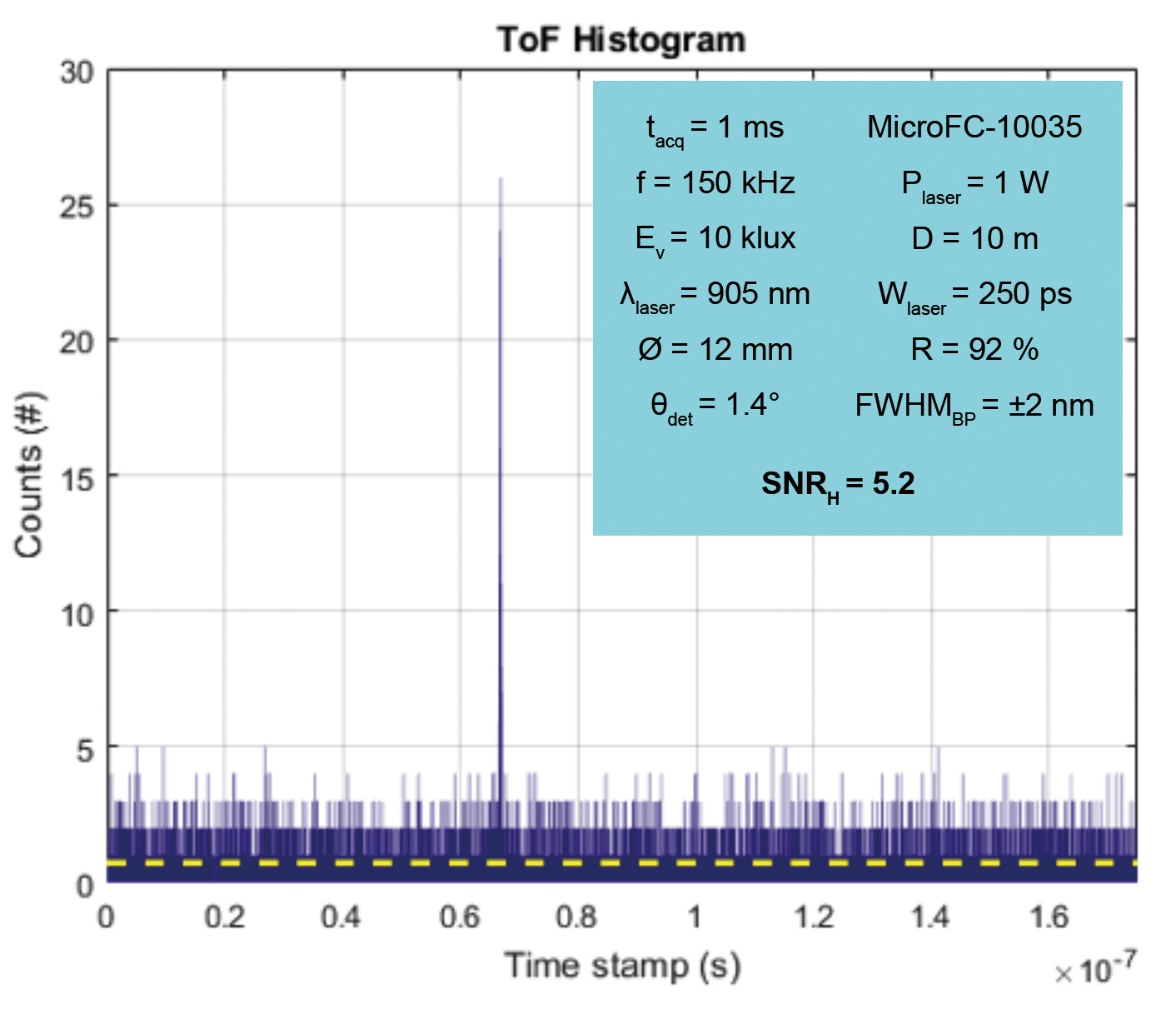 圖10 改變SiPM微元件尺寸的影響
圖10 改變SiPM微元件尺寸的影響
到目標之距離
圖11中的圖疊加了距目標10公尺、15公尺、20公尺和25公尺處的直方圖。X軸上的訊號峰的間距對應於ToF=2×距離/c。隨著距離的增加,從雷射發射器獲得的計數減少,因為感測器上的雷射光子密度以1/d²(其中d是感測器與目標的距離)減少,但環境雜訊保持不變,因為從目標擴散回來的環境光子數量不隨距離變化。在30公尺處,使用這種配置已經不可能進行測距了。當然,可以對配置進行優化,以便在這個距離上進行測距(參考測距展示器建模到100公尺的設置,以模擬長距離的測距)。
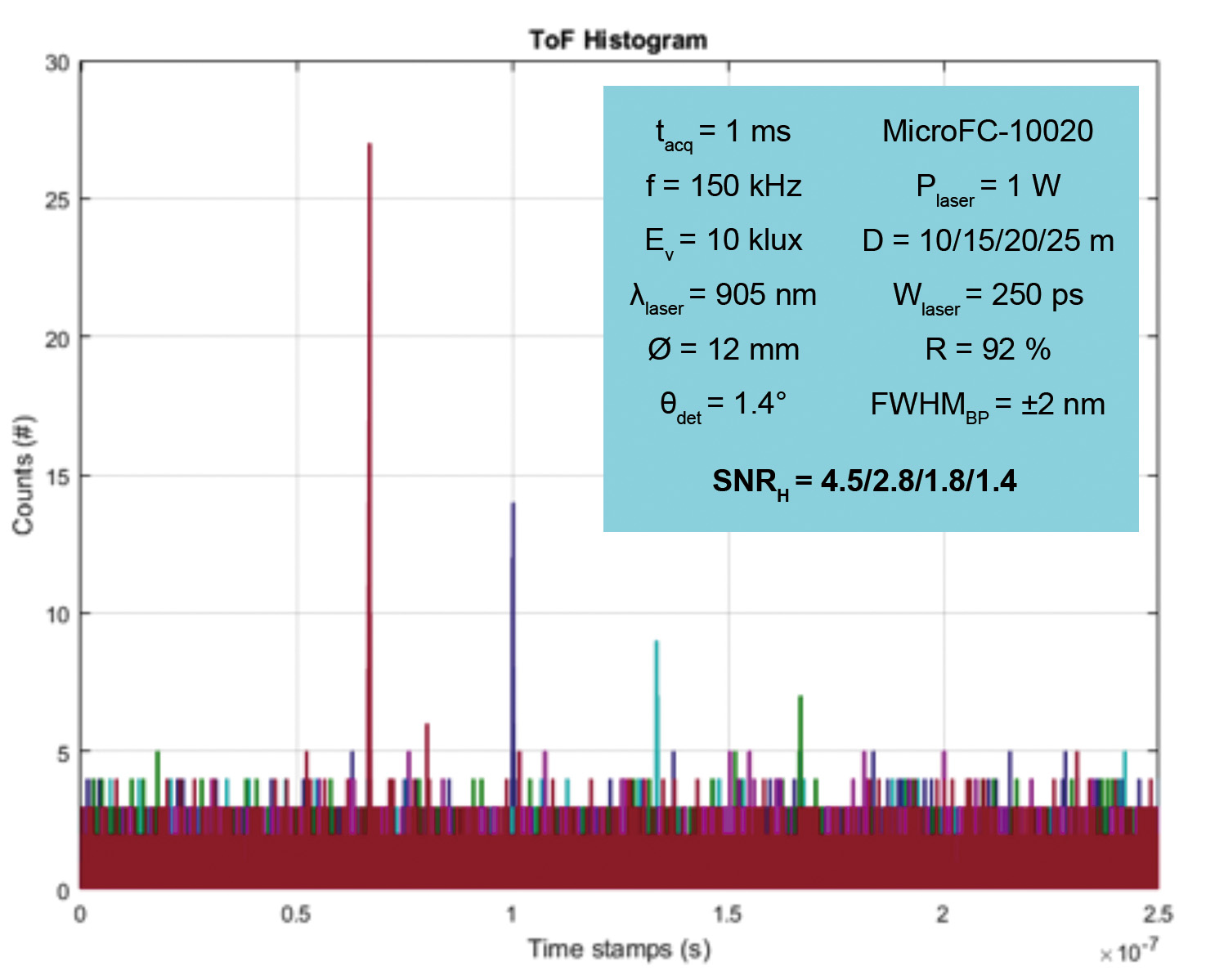 圖11 增加目標距離的影響
圖11 增加目標距離的影響
環境光
接著測試將環境光增加了10倍,達到100klux。隨著打到感測器上的環境光子數的增加和所有其他條件保持不變,每一次單次測量都會獲得更多的環境光子。整個畫面上每倉的雜訊計數相應增加,SNRH受到負面影響。10公尺處的峰值仍可辨認,因此在此光照水準下,使用這種配置仍可進行測距,但現在的測距能力將被降低。相反,在低環境光下,由於雜訊計數較低,SNRH將得到改善。
第一代測距展示器說明
第一代測距展示器(Gen1 Ranging Demonstrator)是個評估系統,用於介紹使用SiPM感測器進行直接ToF測距。Gen1的特點是:光學介面,包括雷射準直透鏡、感測器採集透鏡和帶通濾波器;雷射二極體和驅動電路;SiPM感測器和鑑別器電路;使用FPGA的TDC,讀取和通訊介面;使用PC的軟體。
圖12顯示了系統框圖。該展示器使用了一個905奈米的雷射二極體,脈波寬度為150ps,雷射峰值功率高達2W,雷射脈波重複率為150kHz。雷射輸出訊號由一個發散角為0.06度的透鏡準直。在接收器處,反射的訊號透過一個40毫米焦距的採集透鏡聚焦到感測器上,該透鏡的孔徑為11.4毫米。感測器的視角為1.4度。該訊號還被一個FWHM為10奈米的光學帶通濾光器過濾。偵測訊號鏈包括SensL MicroFC10020-SMT SiPM、一個增益級和一個高速比較器,執行前緣辨識,以及脈波發生器電路。產生的脈波使用獨立的TDC或使用FPGA的TDC和數據採集系統進行時間標記。採集的數據透過高速USB鏈路傳輸到PC軟體。系統軟體從獲得的數據中建立直方圖,並將其繪製出來進行分析。除了以曲線擬合演算法提取ToF之外,用軟體可調設置可選擇一系列的配置,以優化系統用於各種應用。
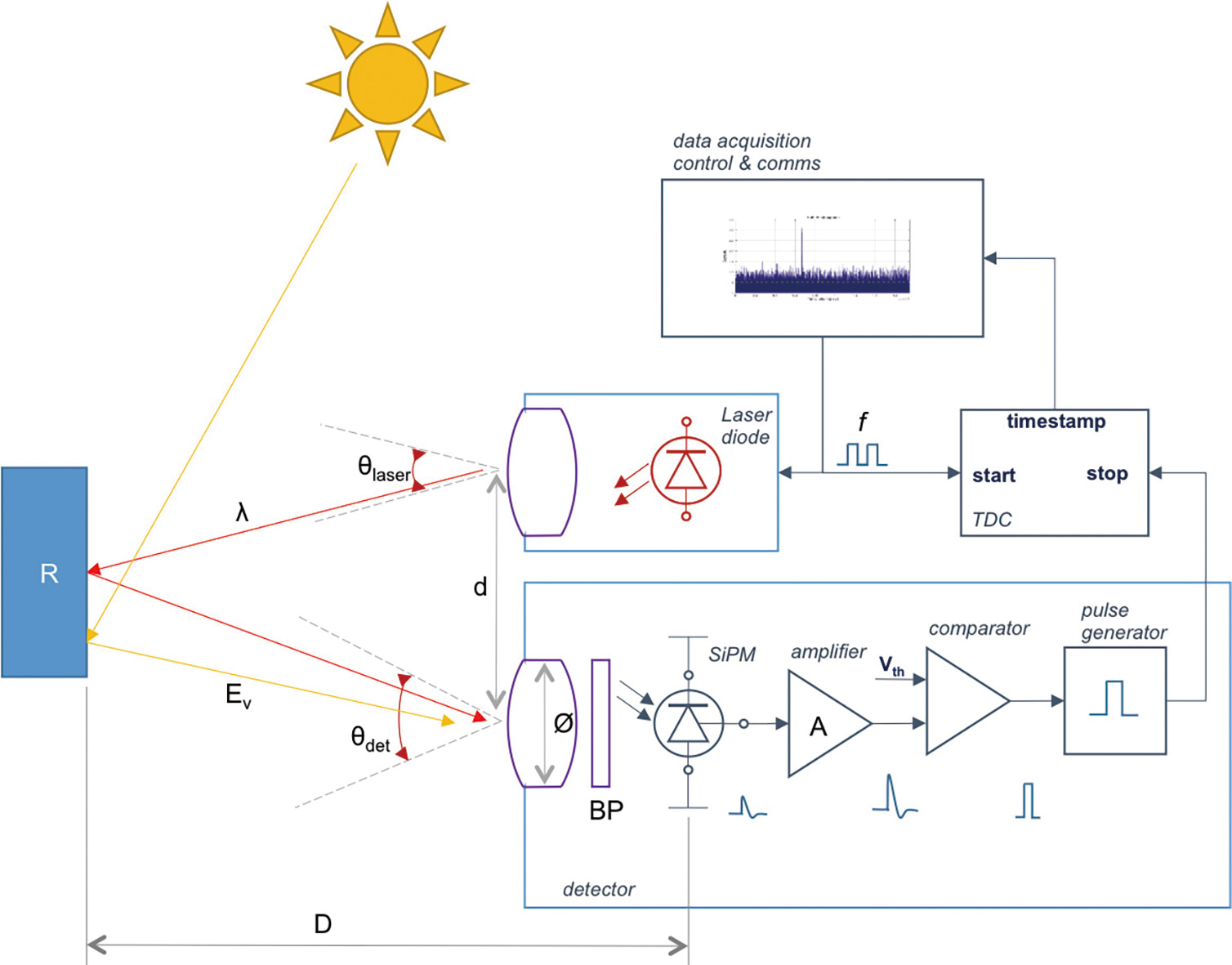 圖12 Gen1測距展示器原理框圖
圖12 Gen1測距展示器原理框圖
第一代測距展示器的性能
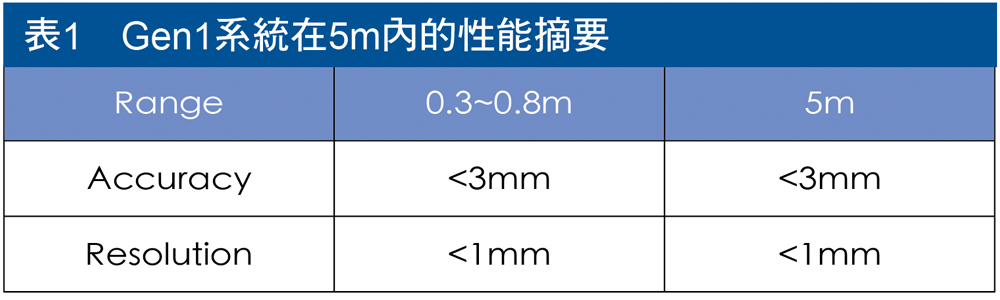
第一代測距展示器的性能已測量了一些有著不同的目標距離和環境光條件的應用案例。從0公尺到5公尺的實際測距數據如圖13所示,採用測距數據直方圖的形式,對比由此產生的測距和實際測距特性以及相關的測距誤差。表1總結了Gen1系統在實驗室250lux環境光條件下,5公尺以內的性能。
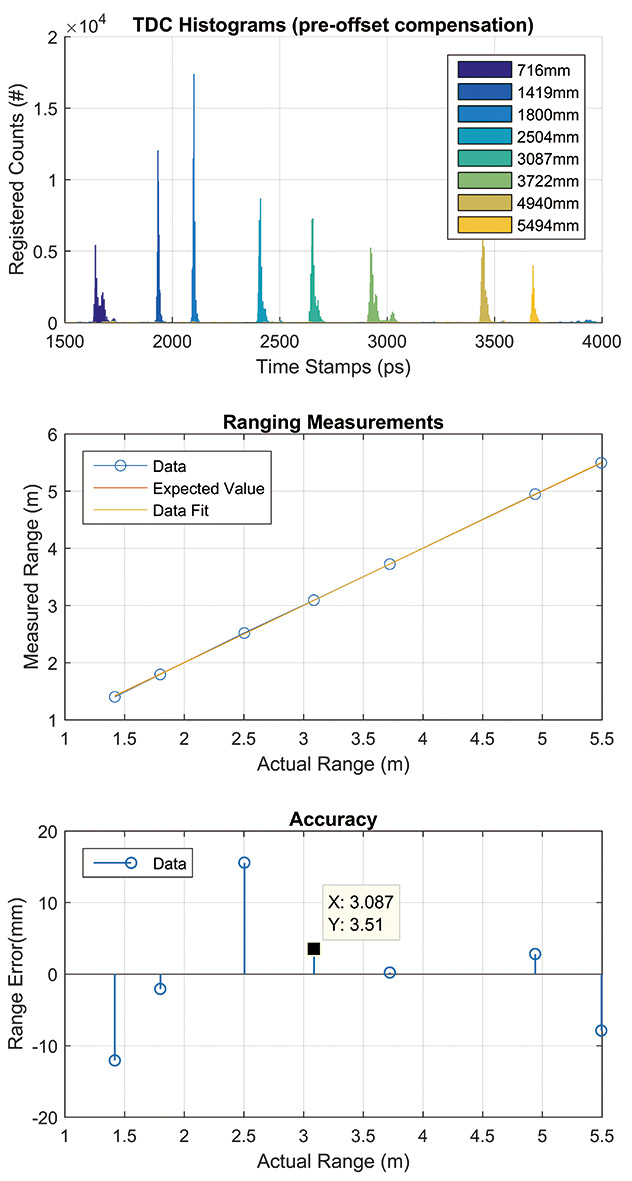 圖13 Gen1系統在5m內的基準性能數據
圖13 Gen1系統在5m內的基準性能數據
使用Gen1系統測量結果對模型進行驗證
用展示器的系統參數對模型進行配置,並在與目標有相同距離和環境光的條件下進行擬真。然後將擬真結果與測距展示器的測量結果進行比較,如圖14和圖15所示,具有良好的相關性。這驗證了該模型,並提供了為不同應用案例設計系統的方法。
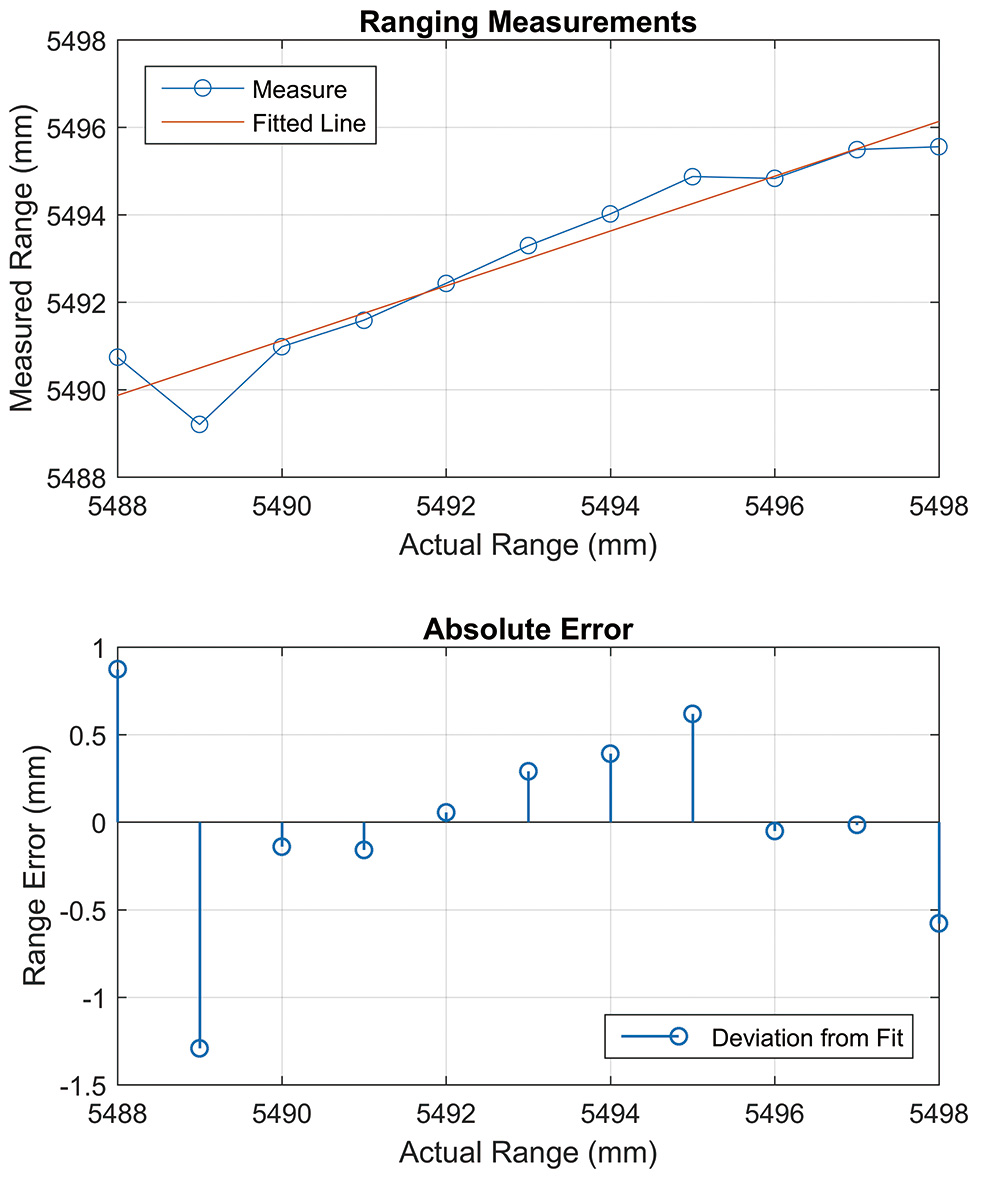 圖14 用Gen1 Ranging Demonstrator採集的數據
圖14 用Gen1 Ranging Demonstrator採集的數據
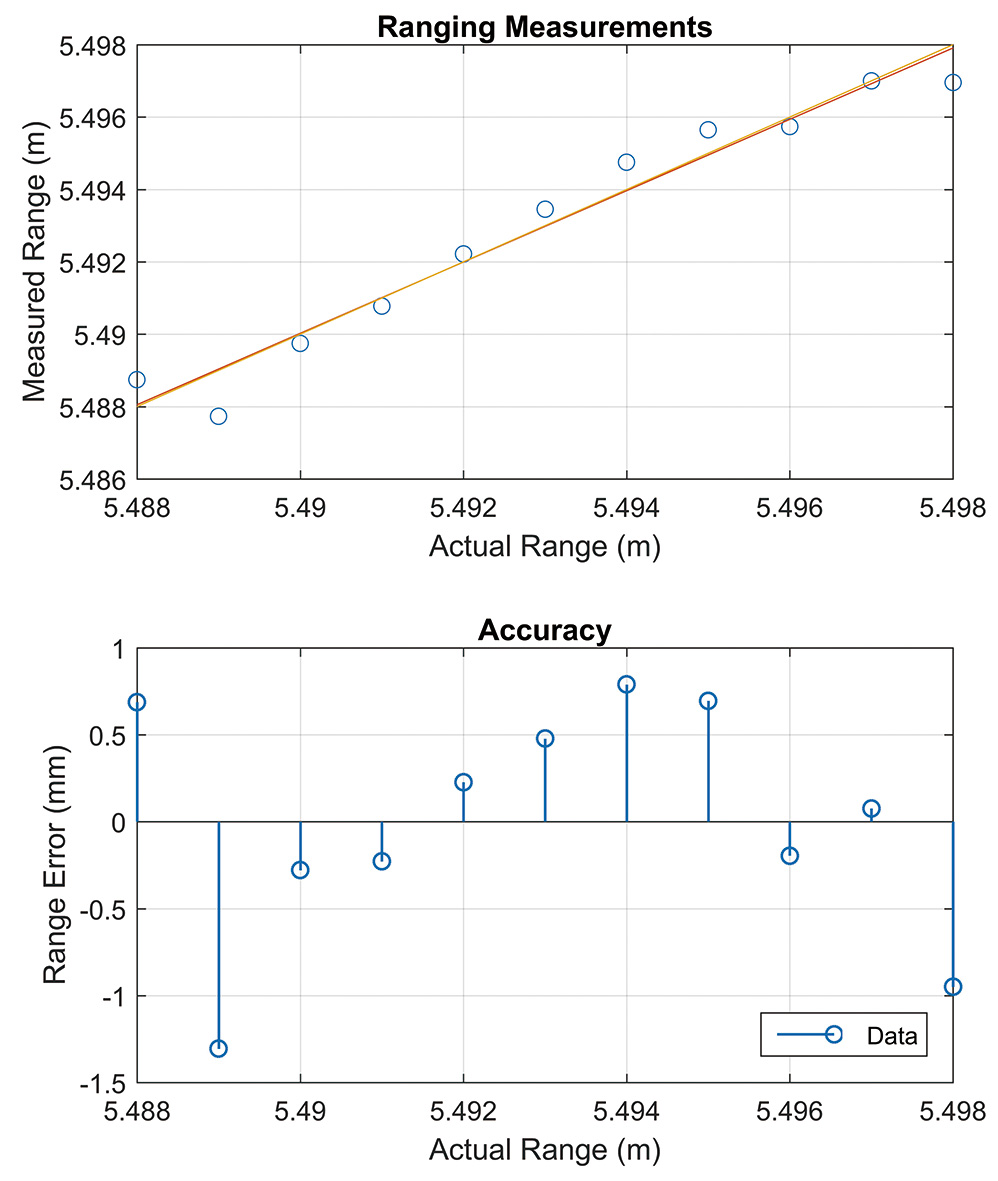 圖15 MATLAB模型擬真數據
圖15 MATLAB模型擬真數據
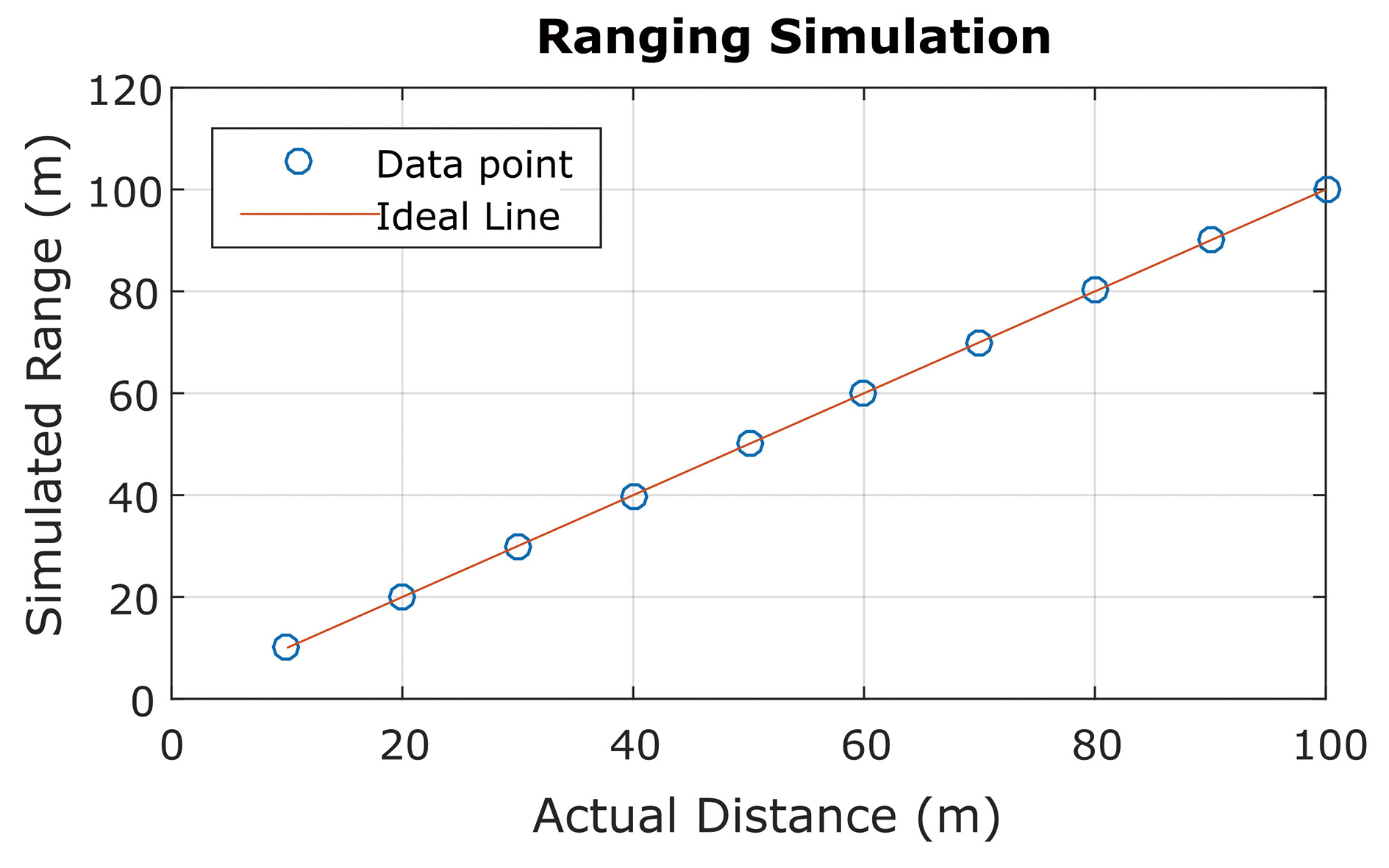 圖16 使用Gen2系統參數仿真對10公尺至100公尺目標的測距數據,顯示出良好的線性度
圖16 使用Gen2系統參數仿真對10公尺至100公尺目標的測距數據,顯示出良好的線性度
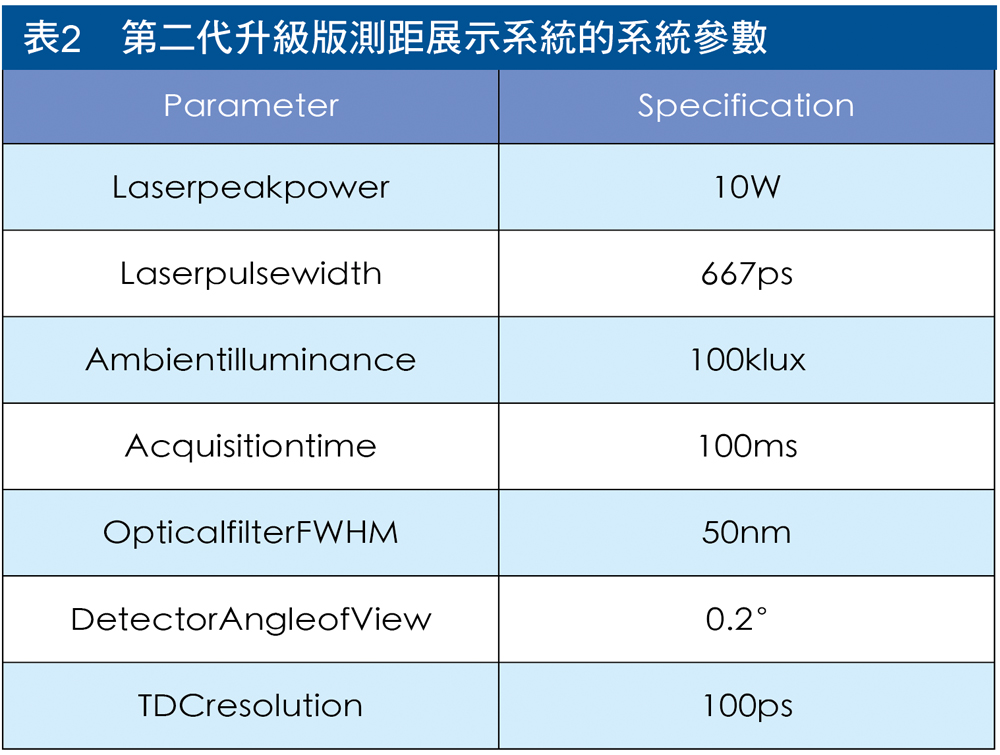
將Gen1系統升級為測距達100公尺的Gen2系統
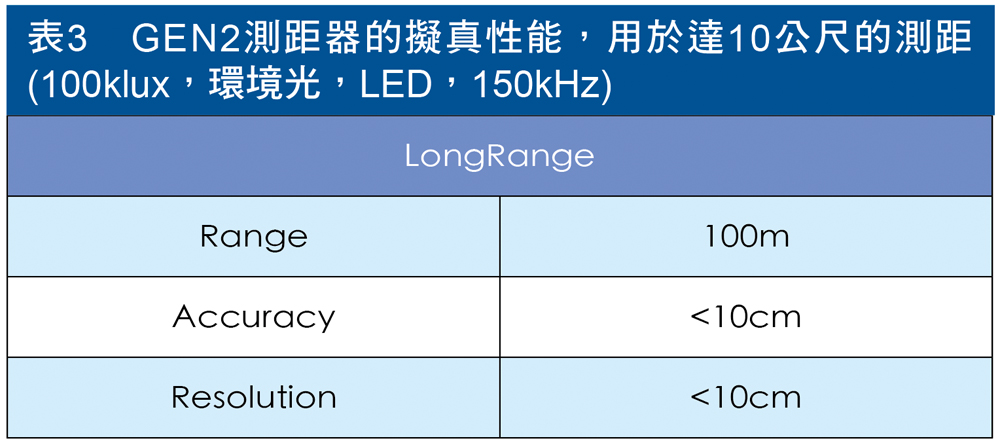
該模型隨後被用來開發一套系統參數,使Gen1系統升級到能夠達100公尺測距。這升級系統稱為Gen2系統,參數變化顯示在表2中,在10公尺到100公尺範圍內的測距,則顯示了良好的線性度。表3總結了相應的系統性能。
(本文由安森美提供)