汽車自駕、聯網、電動化與共享發展不斷超前演進,人類理想中的未來汽車已經逐漸可見雛形。感測器質與量大幅成長,亦助力車用晶片與人工智慧(AI)的應用發展。
隨著越來越接近真正全自動駕駛的理想境界,比利時微電子研究中心(imec)以先進技術140GHz雷達晶片、感測融合、AI解決技術瓶頸,布局L4及L5的自駕市場。
車用感測器各有千秋
車用感測器在自駕車發展中相當重要,其中包括毫米波雷達、超音波、攝影機與光達等感測器,上述感測器具備不同特性因應各類場景。imec R&D VP Kathleen Philips(圖1)表示,每種感測器技術都有其優點和缺點,透過雷達技術能實現感測跟車,攝影機則為駕駛者的第三隻眼,協助捕捉盲角與提醒道路是否安全,而光達則是偵測行車距離的主要元件。
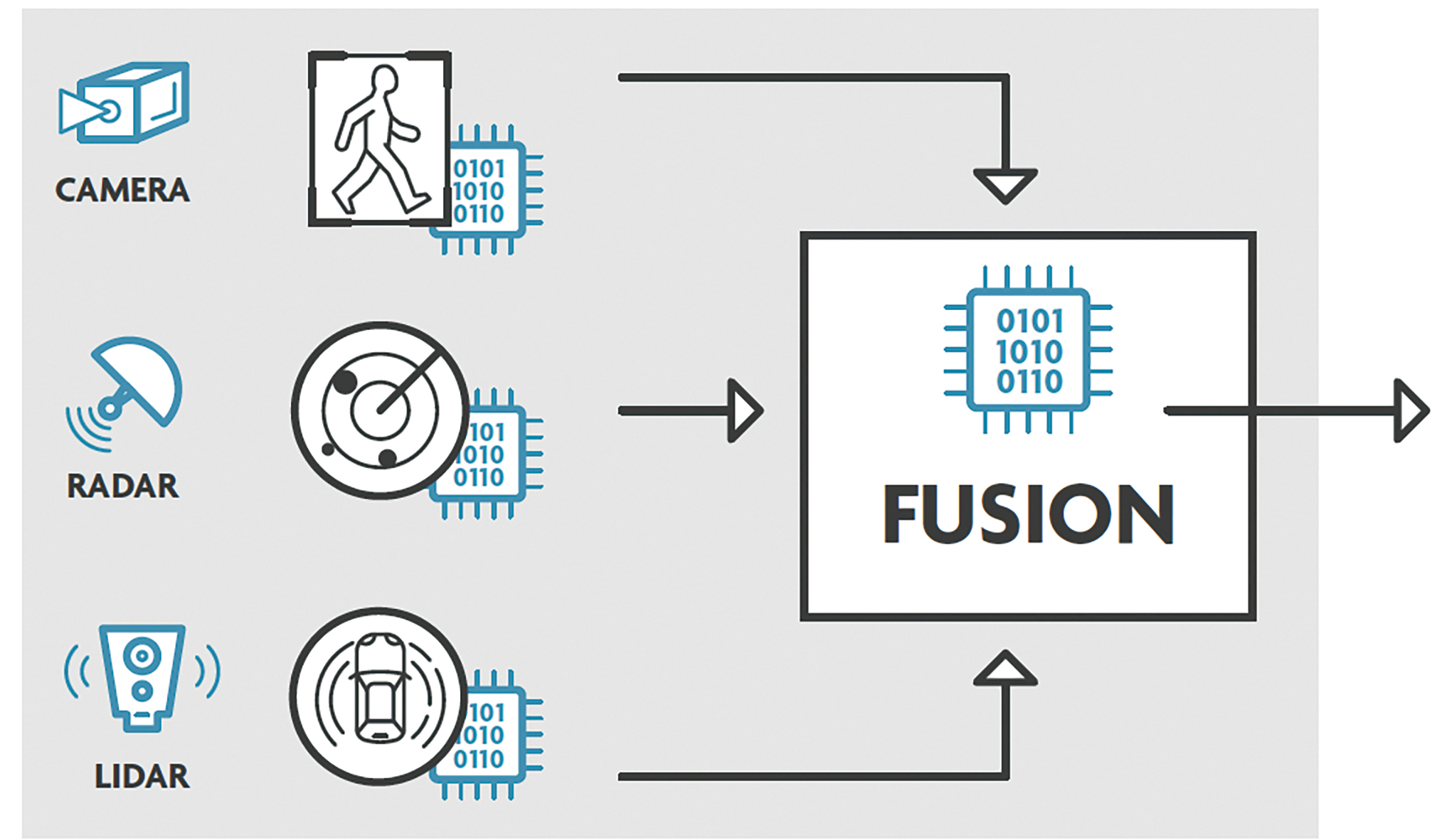 晚期融合是將資料在每個獨立感測器分別偵測物件,並做出結論後才進行融合
晚期融合是將資料在每個獨立感測器分別偵測物件,並做出結論後才進行融合
圖片來源:imec
其中,超音波雷達最早上市,並具備成本較低、短距離內測量優勢,不過缺點是易受天氣變化影響;毫米波雷達則可穿透塵、霧、雨等阻光障礙,以因應全天候環境,且具抗電子干擾特性,但探測距離和精準度相較光達仍有些差距。
廣泛用於汽車的毫米波雷達,在方位解析度和精度上仍有改善空間。因此,光達便逐漸成為市場青睞的選擇,其高效能、解析度可滿足產業對更高精準度需求。但Philips認為,目前光達最大問題仍是組件的成本,imec透過光學波束成形技術降低系統功耗,也能間接緩解散熱問題,但容易受天氣影響,需要使用額外感測器或AI來解決這項問題。
光達雖然廣受看好,但相較之下業界更多採用技術成熟的毫米波雷達。Philips表示,imec研發高解析度、更輕薄短小、更高整合功能的140GHz雷達晶片,提供10GHz頻寬支援深度解析度。利用矽(Si)技術和台積電的互補金屬氧化物半導體(CMOS)製程,開發具有小尺寸、物理穩健性和抗靜電放電特性的感測器,同時達到成本效益,有效提高雷達解析度和抗干擾能力。
感測融合與互動
雖然感測器各有千秋,但感測融合(Sensor Fusion)目的是獲得不同感測器和感測器種類的輸入內容,並且使用合併勾連的資訊來更加準確地感知周圍的環境。正因為感測融合的複雜程度更高,融合方式以往分為兩種過程:早期融合(Early Fusion)與晚期融合(Late Fusion)。
 圖1 imec R&D VP Kathleen Philips表示各類感測器各有優缺點,因此,ADAS推進源自於感測融合(Sensor Fusion)和人工智慧(AI)。
圖1 imec R&D VP Kathleen Philips表示各類感測器各有優缺點,因此,ADAS推進源自於感測融合(Sensor Fusion)和人工智慧(AI)。
「晚期融合」是感測器得出所產生的資料後,與其他感測器同時傳送原始資料到主處理器。因此,大多數感測融合的結果是融合目標資料而非原始資料。相對而言,「早期融合」或「低階資料融合(Low-level Data Fusion)」, 則是將每個感測器蒐集而來的低階資料,整合在同個智慧系統以處理所有資料。
未來車用感測器倍數增加,因此需要大量的運算力及頻寬,感測融合與日益嚴格的硬體也都要求齊頭並進。Philips表示,為此imec提出新的感測融合概念「協作感測融合」,以回饋迴路方式協助不同感測器交換訊息,進而可在失靈的感測器狀態下提供備援。例如車用雷達突然出現反射,便透過攝影機的臨界值自動調整以進行補償。可有效地發現難以檢測物品,減少感測誤差情形發生。
AI實現精準判斷
為了讓汽車的先進駕駛輔助技術提升至另一個層次,具備像人類水平的認知系統,除了感測器之外,人工智慧(AI)是自駕車關鍵技術,在資料擷取蒐集後需要透過大量的雲端運算,並且在深度學習演算法與神經網路架構底下,預判行車時的突發狀況。
Philips指出,從人工智慧的角度來看,感測器需要配備邊緣運算能力,也因為下一代自駕車無法接受延遲情況產生,邁向極端邊緣運算是自駕車接下來所欲達到的目標,才可最大程度降低反應延遲的時間,因此,將運算能力嵌入感測器,能使自駕車能夠更快地對危險情況做出反應。