對於正在為新興物聯網應用領域開發智慧感測器的業者而言,其中一項最難以取捨的決定,就是效能與電力消耗。在更廣泛的效能範疇中,雜訊經常是一項重要的考量屬性,因為它會限制智慧感測器中關鍵功能模組的零件選擇,因此進而提高功耗的負擔。此外,不同雜訊行為會催生出不同的濾波需求,這些需求除了會影響感測器對於快速變化狀況的反應能力外,還會延長發展量測品質方法的時間。
在許多支援持續觀察(取樣、處理、通訊)的應用之中,系統架構通常必須因應包括雜訊與電力兩難的取捨,因為雜訊最低的解決方案如鳳毛麟角,但卻又得提供最低的功耗(並歸屬在特定功能類別的元件)。舉例來說,微機電系統(MEMS)加速計一般在傾斜量測系統中都擔任核心感測器。
表1顯示兩種不同的產品:低雜訊感測器(ADXL355)以及低功耗感測器(ADXL362)。表中4個項目的下面3個,代表了低功耗感測器的三種可選擇運作模式,而第1個項目,則是低雜訊感測器的關鍵規格。從這項商業規格的關鍵邊界開始,低雜訊感測器提供比低功耗感測器最低功耗模式還要低27倍的雜訊,但耗電就明顯高了許多。對於效能要求較為嚴苛的應用,可能須考慮低功耗感測器的最高效能模式,低雜訊感測器的雜訊低了9倍,但低功耗感測器的功耗則低了13倍。
智慧感測器架構
對於並不須要持續觀察與量測的應用而言,平均功耗與雜訊之間的關係就更有意思了。雜訊與功耗之間的關係變得更為互補,有些人可能會感到意外。這對一些應用可能是好事,因為先前世代的設計可能已經延遲,開發者遲遲無法判斷功耗或效能是否可以符合設計的要求。但是,現在開發者不必等候有人來答覆這個陳年問題,因為智慧感測器架構定義了自身的運作模式,在這個自己開拓出的商業領域中提供各種明確量化的選項。
為特定應用提供量化的相關選項,一開始須針對訊號鏈路設立一些假設,並從概念性架構著手。圖1顯示一個通用的智慧感測器架構例子,架構中包含各種最常見的功能。
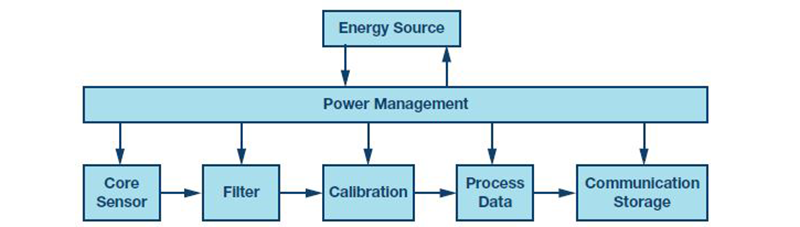 圖1 智慧感測器架構
圖1 智慧感測器架構
感測器核心
智慧感測器內的訊號鏈路起點為核心感測器的功能。在其最基本的形式,核心感測器亦稱為傳感器,功能為將物理狀態或屬性轉譯成代表性的電子訊號。感測器的尺度因子描述本身監視物理屬性或狀況的線性部分電氣響應。舉例來說,諸如AD590這樣一個擁有類比輸出端的溫度感測器,能提供單位為mV/℃的尺度因子。而像ADXL355這樣的數位加速計則提供單位為LSBs/g或codes/g的尺度因子。
濾波器
訊號鏈路(圖1)的下一個功能模組為濾波器。這個階段的目的是降低核心感測器支援各頻段所產生的雜訊,而這些頻段本身和應用並沒有關連。在震動監視應用中可能是帶通濾波器,主要是用來分離隨機震動與特定的頻譜特徵,這類特徵代表的是機器健康狀況下滑。而在傾斜感測器方面,則可能是一個簡單的低通濾波器,像是移動平均(Running Average)濾波器。在這個案例中,時間的長度代表在安定時間(Setting Time)以及濾波器輸出端的殘餘雜訊兩者之間的一項重要取捨。圖2提供了低雜訊感測器的艾倫偏差(Allan Variance)曲線例子,其所代表的是量測之不確定性(雜訊),而所對應的是產生量測結果的平均時間。
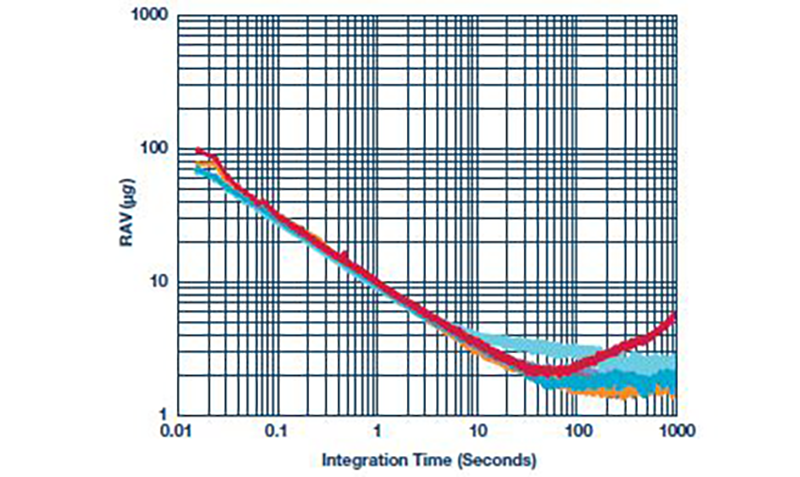 圖2 低雜訊感測器艾倫偏差曲線
圖2 低雜訊感測器艾倫偏差曲線
校正
校正功能的目的是透過套用校正公式來改進量測的精準度。在要求最嚴苛的應用中,這些校正公式通常來自於直接觀察感測器的回應,所得到的結果是在嚴格控制的條件下量測到的數據。舉例來說,在一個傾斜感測器應用中,校正程序涉及到觀察MEMS加速計在多個不同方位上的輸出,這些結果都和重力有關連性。
這些觀察的整體目的,是要觀察感測器對足夠多方位的反應,藉以在以下關係中(參見公式1)解算所有12個校正因素(m11, m12, m13, m21, m22, m23, m31, m32, m33, bx, by, bz)。公式1的修正因素解決了偏移、靈敏度以及對準等誤差。這個公式亦可擴展,用在更高階的感測器行為(非線性)或環境相依性(溫度、物料量)。
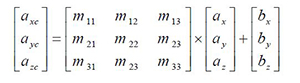
......................................................公式1
資料處理
資料處理功能負責將校正與過濾後的感測器資料轉譯成量測結果,並轉換成應用所支援的格式。在一個震動監視系統中,這方面的程序可能是簡單的RMS-to-DC轉換或高速傅立葉轉換(FFT)加上光譜警報器。在一個傾斜感測應用中,智慧感測器則會將加速計對重力的反應,透過公式2、公式3或公式4,轉換成方位角估算值。
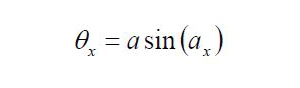
................................公式2
.............................公式3
....................公式4
這三個關係分別代表一、二、三個加速計量測結果的傾斜估算數據,且認定每個加速計之間的方位都維持完美的直角正交。
通訊/儲存
通訊/儲存功能支援資料分級(Data Staging)以及與物聯網雲端服務的連結能力(加密/安全、儲存以及分析)。
電力循環運作
電源管理(PM)功能為典型智慧感測器提供三種不同功能。PM第一項功能是為訊號鏈路中所有元件管理電源順序需求。PM的第二項功能則是將電源轉換成適合的電壓,藉以讓訊號鏈路中所有元件達到最佳化的運作。最後,在固定時間間隔進行量測的系統中,PM系統提供排程機制來觸發每次量測事件。
電力循環是用來在智慧感測器節點中辨識這類非連續運作。這種技巧在兩次量測事件之間讓元件維持在低功耗(或零耗電)狀態,協助節省智慧感測器的用電。圖3顯示一個智慧感測器運用這種技巧在一個完整量測週期中的瞬時功耗。
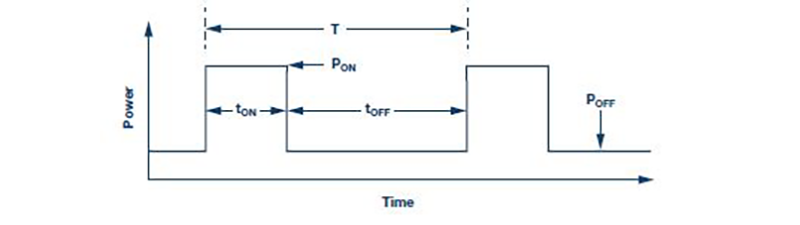 圖3 基本電力循環圖
圖3 基本電力循環圖
公式5顯示其簡單的關係,根據此公式再配合圖3的操作屬性即可估算平均功耗(PAV)。PON是智慧感測器節點在取樣與處理資料以產生及傳輸相關量測結果的平均功耗。POFF是智慧感測器節點支援低功耗睡眠模式的平均功耗。tON是智慧感測器啟動、產生量測結果、將結果傳至物聯網雲端、然後關閉電源所花的時間。tOFF是智慧感測器休眠(睡眠模式或完全關閉電源)的時間。T為平均量測週期時間。
................公式5
量測程序
在啟動時間On Time(tON),智慧感測器通常會經過多個不同的運作狀態。圖4與公式6提供一個範例程序,將啟動時間切分成4個不同段落:初始化(Initialization)、安定(Setting)、處理以及通訊。
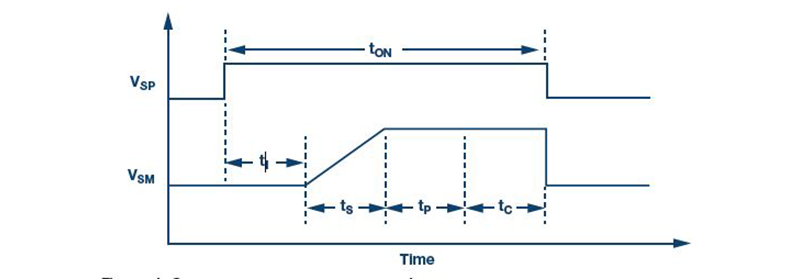 圖4 智慧感測器量測週期程序
圖4 智慧感測器量測週期程序
.......................公式6
tI是初始化時間,代表從上電Power Application(VSP)開始,一直到訊號鏈路中每個元件準備好支援資料取樣與處理,這兩點之間的時間。tS是安定時間,代表從第一次資料取樣,一直到濾波器的輸出(VSM)訊號穩定到精準度足夠,這兩點之間的時間。tP是處理時間,代表在濾波器安定之後產生量測結果所耗用的時間。其中包括套用校正公式、應用相關的訊號處理以及為物聯網安全協定執行資料加密。tC是通訊時間,代表連至雲端服務、傳送加密後的刪除以及支援任何錯誤檢查或驗證服務等步驟所耗用的時間。
安定時間的影響
藉由對量測週期區分不同階段(圖4),濾波器的安定時間屬於一個觀察區域,在這個區域中雜訊會影響智慧感測器節點電力循環的功耗。一般而言,藉由平均化(Averaging)的雜訊降低幅度,會和平均時間的平方根成比例,而耗電減少幅度則會和平均時間成比例。因此雜訊幅度減少10倍,會造成能源消耗(在濾波器安定期間)提高100倍。這種不成比例的取捨,會讓人很快速地選擇最少濾波器的感測器(最低雜訊)。
應用範例
考量圖5所示的微波天線平台,此平台安置在一個天線塔基座上。在這類通訊系統中,資料鏈路的可靠度取決於天線指向角的精準度。維持指向角需要人工調整,尤其是在地震其他以及干擾天線基座的事件之後。由於派員前往維護不僅成本昂貴,反應時間也會受到限制,因此市場上有些天線營運業者正投資研究採用MEMS加速計監視天線本體方向變化的可行性,作為其維護應變策略的一部分。
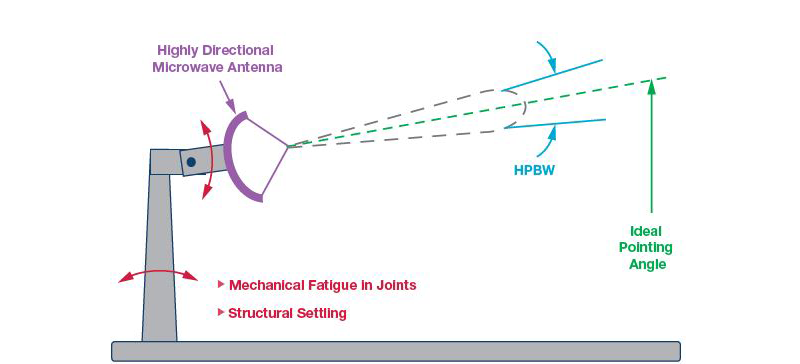 圖5 微波天線平台
圖5 微波天線平台
系統規畫一開始要研究最基本功能需求:在每個天線平台上維持可靠通訊。在這個系統中,可靠的資料通訊要求天線指向角必須全程維持在天線的半功率波束寬度(HPBW)。因此,他們決定在較短的週期內,一旦天線的指向角偏移量超過天線HPBW的25%,就立即派員進行維護。
在支援這項目標的誤差範圍(Error Budget)內,架構允許傾斜量測的尖峰雜訊落在量測目標(HPBW的25%)10%的範圍。為簡化之,架構亦會設定雜訊的尖峰值等於雜訊值均方根(RMS)的3倍。公式7納入所有這些定義輸入,並將之簡化成一項關係,敘述傾斜量測的雜訊必須比HPBW低120倍。
.......................公式7
為將這項角度雜訊要求值連結到MEMS加速計的效能標準,公式8將公式7的結果帶到公式2內基本加速計與傾斜之間關係的公式。於是一個擁有HPBW為0.7度的天線而言,加速計內的雜訊必須低於100μg,才能符合現有標準。
.....................公式8
.....................公式9
這項結果建立一個標準,用來判斷每個候選感測器平均時間的數值(表1),藉以達成一次量測的100μg不確定性。從圖2可看出該款低雜訊感測器會需要約0.01秒的平均時間(tS355=0.01,詳見公式10)才能低於這個值。
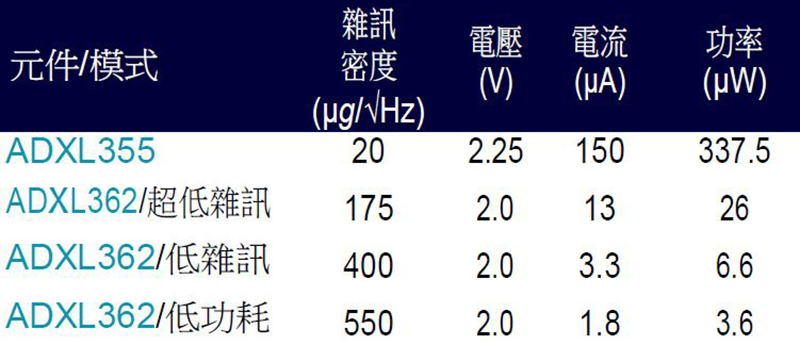 表1 MEMS加速計比較
表1 MEMS加速計比較

....................................................公式10
為快速求出約略值,可假設既然低功耗感測器的雜訊比低雜訊感測器高9倍,它需要的平均時間會比低雜訊感測器多81倍(tS362=81×tS355,詳見公式11)才能達到相同目標。公式10從低雜訊感測器的平均時間算出耗電量,而公式11則從該款低功耗感測器的安定時間算出耗電量(表1)。
....................................................公式11
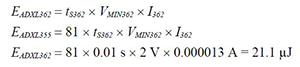
諷刺的是,在這個水準雜訊效能下,最低的功耗卻來自於使用最低雜訊的加速計,而不是最低功耗的加速計。公式12提供公式10與公式11中每個感測器的能源推估值,在量測時間間隔(T=10秒)內,藉以估計安定時間對功耗的影響。
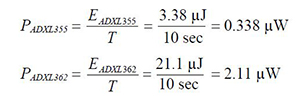
...公式12
結論
本篇文章特別經由討論來揭示一種情況:功耗最低的解決方案採用的是雜訊最低的核心感測器,而不是功耗最低的感測器。對於正為新類別物聯網應用發展智慧感測器概念的業者而言,面臨著嚴苛的效能要求以及有限的能源,而這類解決方案為此挑戰提供了一個重要的方向。其實聰明的解決辦法就是願意率先理解,然後願意挑戰最根深蒂固的舊模式。有時候,最佳效能以及最低功耗,實際上是來自同一個感測器。
(本文作者任職於ADI)
首圖來源:ABB