自從物聯網和工業4.0首度被論及以來,機器視覺、人工智慧(AI)、機器學習(ML)、深度學習(DL)和無線感測器等技術之進步,正持續打造從自動化到自主化的前進之路。
過往工廠網路以有線的工業乙太網路為主,安裝成本高昂且不具彈性化製造的可能,無線網路解決方案如Wi-Fi和4G可提供彈性,但速度和頻寬居於劣勢,而4G LTE雖然符合多方條件,延遲性仍過高。
本文著眼於5G企業專網(P5G),以及它如何支援包括AI相機在內的先進技術,進而使製造商能夠將更多功能推向邊緣。5G企業專網的低延遲性、高頻寬,可為生產作業帶來接近於即時(Near-Real-Time)的深刻洞見。例如從自動導引車(AGV)轉變到具有群體智慧的自主移動機器人(AMR)。本文包含一些使用案例,其中5G連接的AI裝置可以感知環境並相互操作,進而做出分散式的決策,協助智慧工廠從自動化走向自主化。
物聯網發展4階段
互聯、儲存、運算能力是實現物聯網的基礎。欲將傳統工廠作業轉變成智慧工廠,過程中遇到的第一個障礙便是「既有機器可能使用不同種類控制器」,例如PLC、PC、MCU和各種機器通訊協定,例如Modbus、DeviceNet、CAN甚至專有協定。許多更老舊的機器甚至不具備通訊能力。第二個障礙是「機器製造商可能自行開發專有原始碼」,使得工程師難以針對特定工廠之需求進行更改或升級,以達成營運最大化。最後則是「許多工廠經理並不允許讓系統整合商就他們目前已安裝的機器增加、刪減或修改應用程式」。
透過專門廠商如凌華科技的資料擷取系列,可從遠端控制和提取未連線設備之資料,將無輸出設備的基本資料轉送至網路,有效連接未聯網的舊機器。最初的物聯網部署是被動的,使用功能簡單的嵌入式控制器,運算能力有限。從感測器和其他裝置收集而來的資料被儲存在一個集中位置,例如資料湖,基於大數據架構進行處理和分析,透過數據分析可將現場端資料視覺化,以了解營運模式和關聯性。許多數據分析資料也被用於預測性維護,以極大化機器正常運行時間,進而提高生產力並節省成本。
物聯網發展的第二階段是將工廠帶至更主動的環境,以邊緣裝置和網路連接,並與其他邊緣裝置分享結果。透過人工智慧,工業物聯網裝置不再只是呈現已發生的事實,而是自動採取行動。
隨著群集智慧(Swarm Intelligence, SI)的導入,簡單的邊緣裝置可以在本地彼此互動。群集智慧的概念是從昆蟲群落中發現的,例如螞蟻和蜂群是實體之間的集體互動,為了適應製造環境中的動態演變,這實體群可以自我組織,以互相協調方式快速部署。雖然目前群機自主應用在廠域中的規模有限,卻因使用認知AI和機器學習科技建立起低度的自主性。
為了讓物聯網真正普及─也就是進入第四階段,網路延遲性必須降低以達成即時的決策,相關設備也必須以更高自主性的方式運作。5G企業專網被視為是解決網路通訊的答案,可將更多智慧推向資料網路的邊緣並降低延遲。同時,人工智慧聯網(AIoT)正逐漸減少許多在物聯網生態系統中「人為決策」的角色。
無線連接速度/頻寬有限
大多數的物聯網系統目前都是處於第二階段,混合使用工業乙太網路線、Wi-Fi、4G以及更晚近的4G LTE等技術,作為現場端設備的連接骨幹。這些無線連接科技速度和頻寬都有限,更重要的是延遲性,也就是資料在兩點之間旅行所需的時間,正成為關鍵焦點。考量到即便是最快的4G LTE,延遲性仍達到200毫秒,對於某些決策行動是夠「即時」,但對於與安全攸關的決策,例如關閉某個設備以避免意外發生,是不夠快的。
5G企業專網前景大有可為
雖然公共5G的問世對於資料安全可能帶來風險,且延遲性不一致,5G企業專網卻正加速發展中,其擁有低延遲優勢,證諸4G的200毫秒延遲性,P5G的延遲性只有1毫秒,其高速和高頻寬特性,加上人工智慧/機器學習等智慧科技,讓工廠製造人員得以獲取近於即時的見解,可透視製程作業,不僅是對事件產生回應,而是洞燭問題於機先並主動處理。這可應用於機器人、相機、車輛,和所有需要可靠安全之即時網路連接以分享資訊之邊緣AI應用。自主移動機器人和機器視覺都是結合這些科技應用的好例子,可提升生產力和工作人員作業安全。
從自動導引車到自主移動機器人
透過群集智慧,自動導引車轉變成自主移動機器人,這是個開始轉變的起點與範例。但這意謂著什麼?自動導引車是隨著規畫軌跡運行,需要昂貴的基礎設施和額外的個人安全措施。而一群自主移動機器人,相對可以自主執行工作,不需要人工作業員看管,便可察覺它們所處環境並與其他機器人相互操作,作成分散式的決策。
用來實現群集自主性的科技,除了人工智慧聯網,還有第二代機器人作業系統(ROS 2)。機器人軟體開發的開源架構整合了分散式資料服務(DDS),提供一致的資料交換環境,有如資料河般地共同分享資料。ROS 2允許多台機器人協作,並提供可靠的、容錯的即時通訊。
使用一群自主移動機器人將加工中的半成品運送到下一個工作站是一個典型的情境,如果物件要搬到不同地點,一台AMR可以搬運一半到A工站,另一台AMR搬運30%到B工站,最後一台將剩下的搬到C工站。由於AMR是以協作方式運作,並且使用AI相機看見現場的資料,它們知道要按照什麼樣的比例優先送到哪裡,這個機器人群集具有自動設計和決定順序的能力,唯有結合科技,才有可能成就智慧工廠,提升工安、效率和產量。
SOP監測節省大量時間
另一個利用AI機器視覺的情境是標準作業流程(SOP)監測。SOP是為了優化產品品質和週程時間而設計,同時也能保護工作人員免於危險、降低傷害的風險發生(圖1)。
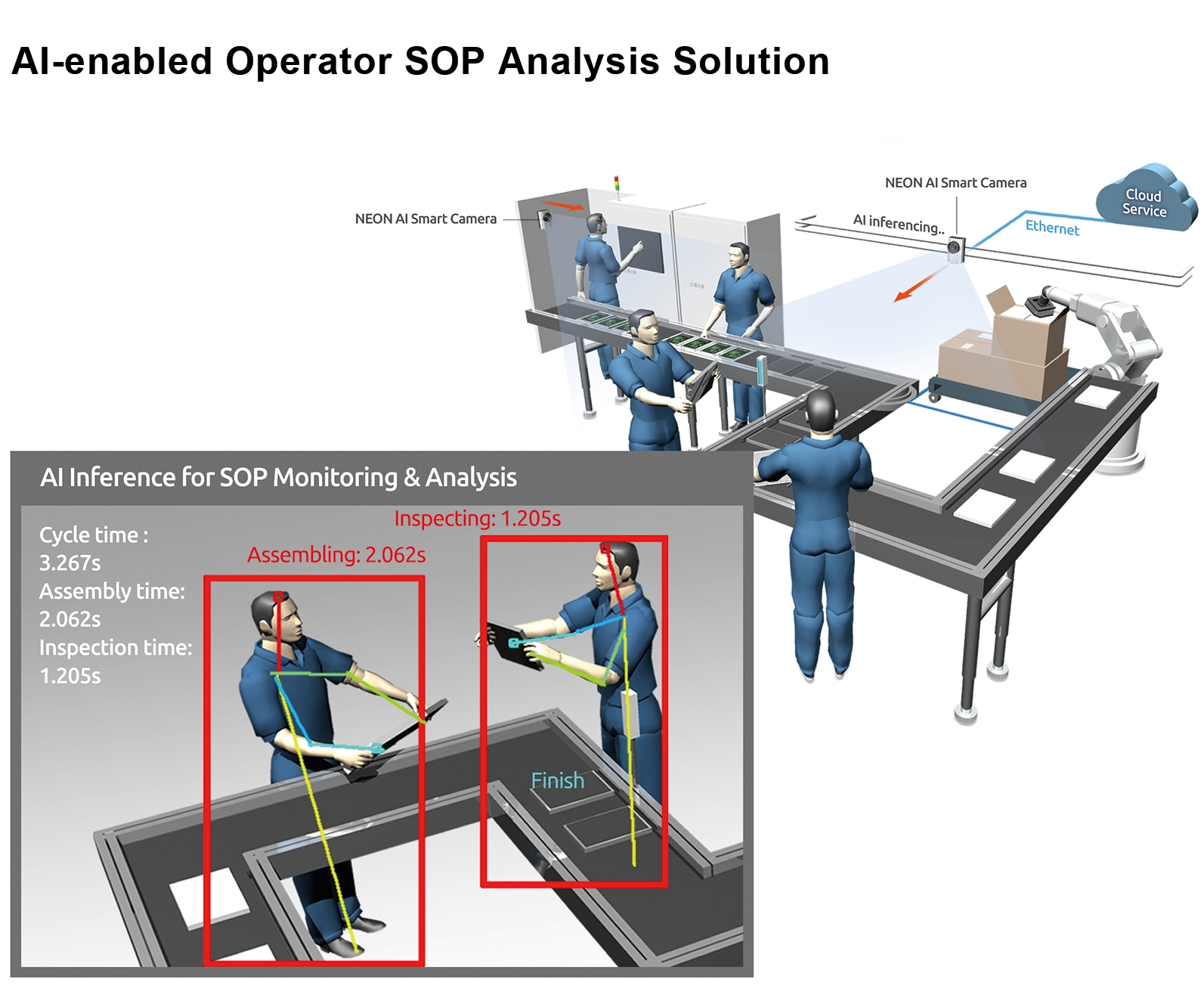 圖1 利用AI機器視覺輔助標準作業流程(SOP)監測
圖1 利用AI機器視覺輔助標準作業流程(SOP)監測
然而,人為錯誤是最主要的失敗因素。傳統上,工業製造業是以人工監測方式稽核是否符合SOP,人工監看常會因人而異,監察的時間也僅止於特定時段。從頭到尾監看生產線上每一作業員之每一步驟是否符合標準太耗費時間,工作流程資料也因此不完整,需要花時間強化資料才能進行分析。這種修正不正確程序的延遲反應可能導致品質問題、較低的生產力,甚至工作場所的工安事故。
台灣LCD面板製造商友達,目前正使用AI智慧相機和行為分析深度學習演算法來滿足這些需求。該解決方案是基於凌華提供的NEON AI智慧相機,整合Intel Movidius或NVIDIA Jetson人工智慧視覺處理核心和各種影像感測器,預先安裝最佳化之作業系統和軟體。低編程需求的邊緣視覺分析(EVA)軟體開發套件支援Intel OpenVINO AI和NVIDIA TensorRT,以及現場就緒之外掛應用程式,可精簡AI視覺專案之開發流程和時間。
這些技術實現一致性、持續優化的SOP監測和評估,讓製造人員可將寶貴時間用於更具生產力的工作。AI視覺即時分析的同時,也讓製造人員得以立即針對不正確的流程步驟作出反應,減少重工成本和物料損失。此外,可避免作業員因操作程序不正確而招致危險。如此面面俱到的SOP監測,同時可協助確認哪些作業員需要加強訓練,以改善週程時間,製造人員現在可將時間用於更具生產力的工作。
5G專網/AI科技成就智慧工廠
製造業者渴望邁向可以處理大量客製化的智慧工廠。為達此目標,必須徹底改變傳統的生產概念。數位轉型將可實現智慧工廠,可在不更動產線、布局、員工配置情況下生產各種不同產品。自主移動機器人會撿取生產所需的零件和工具,送交到工作站。在工作站,自主性機器人會組裝產品,一旦完成時,會撿取成品並透過自主性物流管道直接將產品交件給客戶。人們的工作型態也將可能改變。例如工人將毋需再進入危險區,而是坐在辦公室使用擴增實境(AR)和數位對映,即時監看作業情形。
P5G所實現的物聯網連接性是智慧製造的數位骨幹,AI則是進行決策、控制全局的大腦,AI和物聯網結合帶來智慧、連接的系統和具備自我修正和自我診療的能力,未來產業將繼續協助加速邊緣AI解決方案的部署,以達成智慧製造─也就是從自動化走向自主化。
(本文作者為凌華科技智能視覺事業中心協理)