對用於開啟車庫門等應用的小型交流感應馬達而言,使用三相變頻器電路可以以低成本來實現速度控制和軟啟動。目前固定分相電容式(PSC)馬達在所有馬達類型中可謂是最簡單的,也是上述應用領域中使用最廣泛的馬達類型。這類型馬達的啟動轉矩和啟動電流都小,且因為採用無極性電容方式來運行造成效率低落,由以往的經驗證實這些電容在馬達中會是最先損壞的元件。
如果兩個線圈繞組(Windings)之間的相位差不足,這類單相馬達就無法運行,因此它們也常被稱為雙相馬達。而在輸入訊號和繞組之間會放置一個無極性電容以便可以產生接近90度的相位差。
開關通常使用繼電器來代替,通過切換兩個相位(超前變為落後,落後變為超前)來實現方向控制。電容值通常由馬達製造商規定,對功率低於0.75kW也就是我們正在討論的這種馬達類型而言,電容值一般介於5至50μF範圍內。盡量慎重選擇電容是很重要的,這可以修正功率因數來獲取最大的功率效率。圖1展示的是一個傳統交流感應馬達的拓撲結構。
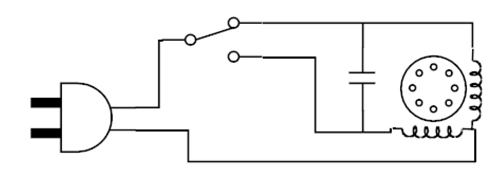 |
| 圖1 傳統交流感應馬達的拓撲結構;電容提供所需相位差以產生旋轉磁場。 |
額定電壓通常很高,大約為220至450V,具體取決於輸入電壓。由於兩端接的是交流電壓,因而不允許電容有極性。如果電容出現故障,馬達也會隨之停止轉動。基於這個因素,能否選擇正確的電容也是至關重要的。
在實際情況下,電容也是具有電阻的,當均方根(RMS)交流紋波電流流過時,由於電容的等效串聯電阻,會產生熱量。在選擇固定電容時,應權衡靜止狀態的啟動轉矩性能和運行時的轉矩振動抑制性能。由於電容的額定伏安值較高,它通常會被選擇來滿足最低的啟動性能要求,但這也導致了運行效率低下。
對於兩個繞組不同的馬達,就需要給兩個相位提供不同的電壓。這種不對稱是由於電容和馬達的電感形成了諧振電路。這樣就造成了其中一個繞組電壓升高,導致了電流不平均。
現今,經常使用三相變頻器來代替固定電容,如圖2所示。這使得我們可以透過給各個繞組施加適量的電壓來調整馬達的轉速,從而避免有些較弱的繞組出現超載現象。
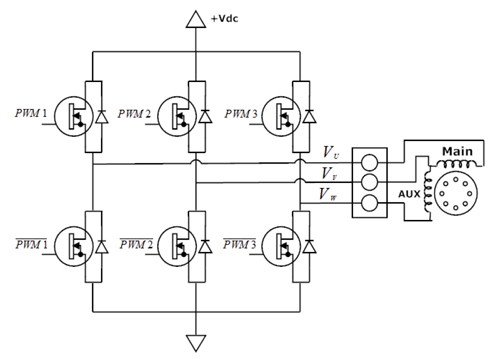 |
| 圖2 有三個半橋的單相變頻器;6個PWM訊號被用於驅動相連的鼠籠式PSC馬達。 |
若非同步驅動線圈,即使沒有電容馬達也仍然可以旋轉。這可以透過在軟體中建立三個相位來實現。這些三相電壓可以互為基準,由此分別在兩個馬達繞組上產生兩個波形。只需取其中一個的相位作為基準或中性相位,即可建立出兩個波形。這三個相位的建立可以借助脈衝寬度調變(PWM)技術在軟體中輕鬆實現。
透過下面這些測試,將PSC傳統運轉方法和不用電容的變頻器運轉方法做個比較。它們是:轉矩測試,描述馬達變頻驅動的效果;加速和速度測試,確定哪種方法可以使馬達軸轉動最快以及負載加速到底有多快;效率測試,比較輸出功率和輸入功率的實際分量,並測量功率因數和其他導致低效的因素。
比較PSC與變頻器運轉方法
這三個測試涵蓋了馬達控制領域最廣泛的設計考量。所有測試都無須使用有別於其他測試的特殊裝置。針對三個獨立測試所做的各個分析可以使用相同的資料子集。測試裝置如圖3所示。
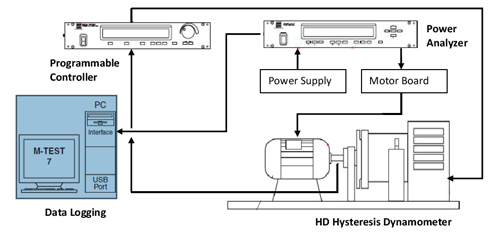 |
| 圖3 測力計上的測試裝置 |
該測試使用0.19kW、布線配置均衡的單相馬達。兩個繞組具有相同的電阻和電感。一個霍爾效應感測器被用於測量馬達軸的轉速。輸入是單相兩線制220V/60Hz電源。輸出被饋送到變頻器上的兩個端子。
PC介面運行Magtrol的M-Test 7軟體。可程式設計控制器把軟體中的測試設置應用到測力計(Dynamometer)上,並讀取所施加的轉矩。功率分析儀讀取和記錄所有其他讀數。
從轉矩測試開始明顯發現,若滿足馬達設計標準,則頻率在50至60Hz之間時馬達擁有約0.75Nm的最高啟動轉矩。頻率高於和低於60Hz時轉矩較低。然而,低頻率並不能產生恆定的轉矩曲線。頻率低於60Hz就需要微調電壓頻率比,以避免造成馬達損耗和馬達驅動的不準確。在最大電壓下,應保持頻率低於60Hz。
低頻會導致電感阻抗減小。對這一降低的阻抗施加高電壓,則會提高定子電流,從而產生更高的轉矩。此時需要進行微調來確保轉矩曲線為線性。
兩種方法產生的曲線形狀大有不同。電容方法的啟動轉矩更大一點,而且在60Hz時比變頻器加速更快。變頻器產生的是類似於D類設計馬達的曲線,而PSC運行拓撲產生的是類似於A類的轉矩曲線。由固定電容引起的不等電壓幅度又會造成了定子內磁通不等幅度(Unequal Magnitude of Magnetising Flux Within The Stator)的變化。由於這種特殊馬達各個繞組的阻抗相同,變頻器試圖在各個繞組創建等量的電流。因為驅動拓撲存在這些差異,轉矩曲線的形狀並不相似。
現在來看看當轉子被鎖住時的啟動轉矩,如果設置變頻器只在調變頻率為60Hz時轉動馬達,那麼變頻器就無法帶動與PSC方法相同大小的負載。然而,變頻器可以使用變頻方式來驅動更大的負載。設計人員必須還要權衡大的啟動轉矩與效率和速度之間的關係。
控制電壓和頻率最明顯的好處就是設計人員可以控制馬達軸的轉速。它旋轉的越快,負載就能越早被推挽至最終值。對於車庫門或閘控系統應用而言,這將是一個關鍵的設計亮點。
變頻器
因此,變頻器使得馬達的性能優於採用PSC方法驅動的相同馬達。PSC方法只能以一個頻率驅動馬達,所以轉速無法超過其同步轉速。
變頻器可以被構建成一個特定於應用的平台而非一個通用展示板。然而,它提供了很多輸入和輸出(I/O)介面以便使用者操作和修改。變頻器被設計成可以驅動單相或三相交流感應馬達。本文以微芯(Microchip)的PIC16F1509微控制器為例,概觀圖4所示。
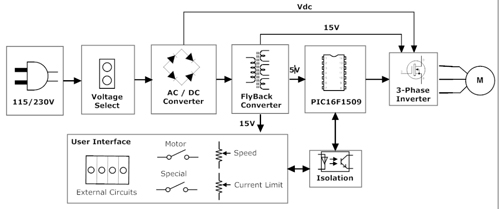 |
| 圖4 整個系統的頂層概觀 |
在設計時考慮到了靈活性,因此可以選擇使用或不使用其中的某些特性來達到最優化的目的。大部分I/O介面使用預設程式碼,但是仍然有足夠的空間允許開發人員進行自訂修改。I2C線路也可以自由添加任意從屬設備。
部分I/O介面可以通過多工方式共用一個接腳,如此可增加可以使用的I/O介面數量。通過兩個四通道光電耦合器和一個單通道光電耦合器,可獨立滿足各使用者介面的要求。
提供兩個開關按鈕和兩個電位器。同時,另有連接插頭用於連接外部I/O,比如車庫門開啟觸發感測器。這兩個電位器光電耦合電路中的電晶體工作在其放大區。由於光耦LED不具有線性I-V曲線,因此輸出是近似線性的。每個電位器會消耗30mA範圍內的大電流。
數位按鈕和輔助輸入均已配置為「輸入準位改變的中斷」(IoC)。這使得中央處理器(CPU)無須不停檢查接腳的電壓準位。無論何時檢測到一個IoC,都必須讀取類比數位轉換器(ADC)讀數來確定是哪一個輸入接腳的中斷。
運行
當PIC16F1509微控制器進行接腳初始化並停止馬達時,馬達處於空閒狀態。當啟動按鈕被按下時,馬達使用軟啟動方法開始運轉,以線性方式調節頻率和電壓,以便馬達可以先緩慢的提升到運行速度。當軟啟動操作完成時,馬達便進入一般運行狀態。
在主控制迴圈內,馬達速度和電流跳變點會被不斷查詢。一旦檢測到過流現象,馬達就會被停止,而LED狀態燈會閃爍以提示出現故障。通常會使用剎車按鈕或軟停止來使馬達停止運行返回到空閒狀態。
用於車庫門等應用的交流感應馬達可選擇由變頻器代替傳統電容來驅動。這使我們只需要較低的成本就可以為馬達添加速度控制和軟啟動功能。
(本文作者任職於微芯)