本文將探討發展二輪車道路相關安全輔助服務,透過號誌、偵測器及事故統計資訊,將周圍環境可能發生的危險通知駕駛,降低車禍事故的發生。實驗情境採用陀螺儀的三軸旋轉角度量測,收集駕駛行為數據,做為未來分析駕駛行為大數據資料與駕駛行為-回饋系統調整方法,建立車聯網服務系統的發展基礎。
二輪車事故頻仍 納入CVSS勢在必行
車聯網服務系統(Connected Vehicles Support Systems, CVSS)主要以車輛與車輛之間的通訊協定與緊急車輛通知為目的所設計的一套系統,在CVSS中以車輛中設置通訊用射頻感測器來與前車進行通訊,當通訊用射頻感測器將兩車通訊連線建立後就會收到前車的行車資訊,藉由這些行車資訊能夠得知前車的車速並依據其車速來保持安全距離,並且會隨著前車的加減速的行車資訊來控制自身車速以保持安全距離。
CVSS亦包含有緊急車輛的存在通知系統,其系統是根據緊急車輛的鳴笛聲來確認其車輛的距離、方向以及行進方向,以判斷是否往自身接近,同時顯示其車輛與自身的距離,即使被後方車輛阻擋住視線,也能讓駕駛人知道其緊急車輛的位置。
目前的安全輔助系統,都是以四輪車為主要服務對象,然而,在台灣、大陸、印度與東南亞國家的交通工具,仍以二輪車為大宗,在交通事故上,二輪車的事故數量居高不下;而這些交通事故原因主要都是未與前車保持距離、障礙物阻隔或大型車輛視線死角。
由於二輪車的事故頻率增加以及造成重大傷亡,將二輪車納入車聯網的服務系統,對國內交通安全來說極為迫切。而最近光陽(Kymco)在2016年義大利米蘭國際車展對全球所發表的「Noodoe車聯網」,是屬於一種社群網路服務的延伸,並不含有車間的通訊協定。
為了發展國內的車聯網服務系統,資策會承接與執行「聯網智慧車載服務系統與應用發展計畫」,發展車間相關安全輔助服務,透過號誌、偵測器及事故統計資訊,將周圍環境可能發生的危險通知駕駛,其中「車聯網核心大數據分析平台」負責CVSS系統室內驗證、情境警示人機介面(HMI)系統規劃、程式撰寫與測試、V2X情境規劃與實驗場域配置、場域測試與大數據資料建置與蒐集、駕駛行為問卷設計、資料蒐集、分析與研究。以下主要探討場域情境的測試與結果分析。
場域規劃/情境配置 經實驗找問題癥結
首先說明量測裝置部分,本實驗採用陀螺儀的三軸旋轉角度量測情境,收集駕駛行為數據,經由分析駕駛行為大數據資料,建立駕駛行為-回饋系統調整方法,作為未來車聯網服務系統的發展基礎。於國立高雄第一科技大學校園內規劃三個地點,執行六種情境。
本平台的環境設置包括三軸旋轉角度量測陀螺儀,該陀螺儀所量測的旋轉角度以Sensor Log蒐集顯示,並將原始資料輸出以csv檔格式儲存,由此可進行原始資料統計與分析作業,圖1所示為所擷取的Orientation資料,其取樣時間為0.2秒。
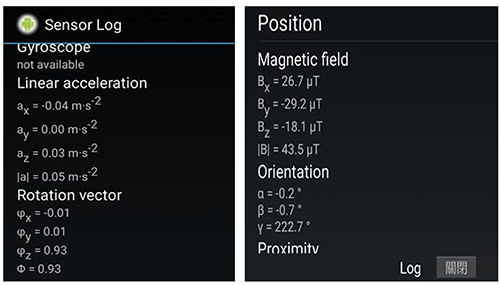 |
| 圖1 三軸旋轉角度量測陀螺儀所收集的資料 |
另外,Orientation數據資料包含α、β以及γ三個參數,分別代表pitch、roll以及yaw。在本場域實驗中,此三軸角度定義為仰俯角、傾斜角與轉角(圖2)。
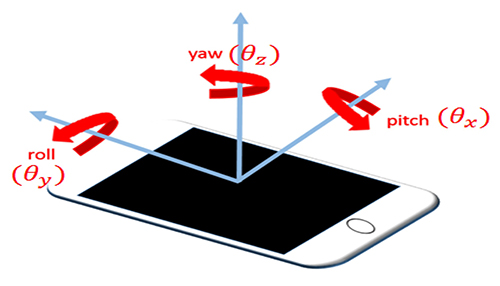 |
| 圖2 手機三軸旋轉定義圖 |
在場域規劃方面,本計畫實驗場域,位於國立高雄第一科技大學東校區校園內。根據實驗所需不同情境,規劃3個地點(圖3),其中各情境與實驗場域規劃位置如圓圈標示。本實驗的交通工具包含4輛汽車、3輛機車與3輛自行車,設備包括車機10台以及實驗人員34位,實驗進行方式以分批在3個實驗地點同時進行,如圖4、表1、表2所示。
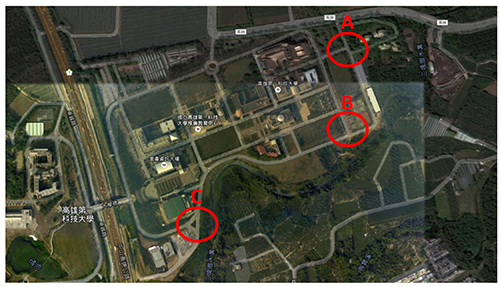 |
| 圖3 校園地圖與情境與實驗場域規劃位置圖 |
 |
| 圖4 六種情境模擬 |
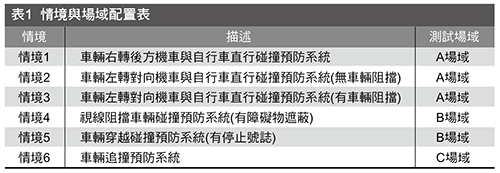 |
| 表1 情境與場域配置表 |
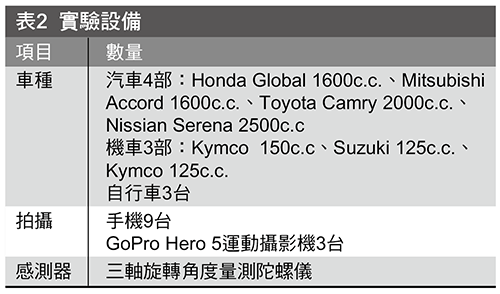 |
| 表2 實驗設備 |
此次的實驗測試規劃共分為6種情境,其中實驗場域A接近雙T路口,此場域規劃進行路口左轉碰撞與右轉碰撞的情境(圖5),在此場域進行3種情境,包括:情境1-右轉碰撞預防系統、情境2-左轉碰撞預防系統(無車輛阻擋)以及情境3-左轉碰撞預防系統(有車輛阻擋)。
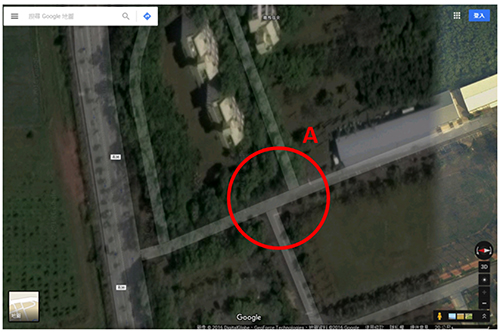 |
| 圖5 A實驗場域:接近雙T路口 |
情境1:右轉碰撞預防系統
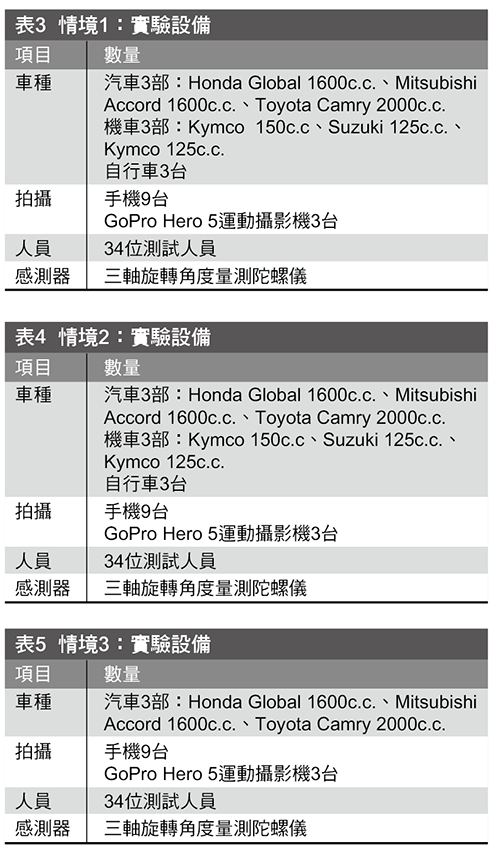
情境1的實驗設備如表3所示,這裡將分成右轉碰撞預防系統V2M以及右轉碰撞預防系統V2B兩方面來加以測試。
 |
| 表3-5 |
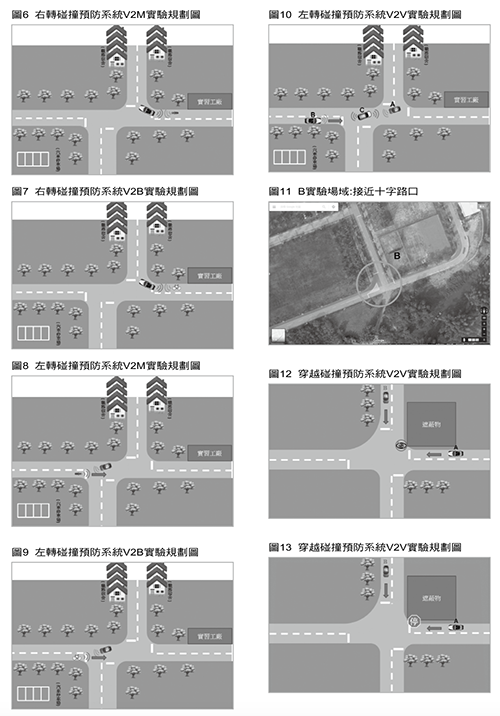
首先是右轉碰撞預防系統V2M,此情境為前方汽車右轉,後方機車直行,在未警示的狀況下,後方機車來不及煞車,與前方汽車發生碰撞;在有警示的狀況下,後方機車會先得知前方汽車將要右轉的訊號,並且提前煞車,避免發生碰撞(圖6)。
第二是右轉碰撞預防系統V2B,此情境為前方汽車右轉,後方自行車直行,在未警示的狀況下,後方自行車來不及煞車,與前方汽車發生碰撞;在有警示的狀況下,後方自行車會先得知前方汽車將要右轉的訊號,並且提前煞車,避免發生碰撞(圖7)。
情境2:左轉碰撞預防系統
情境2的實驗設備如表4所示,這裡將分成左轉碰撞預防系統V2M以及左轉碰撞預防系統V2B兩部分加以測試。
首先是左轉碰撞預防系統V2M,此情境為右方汽車左轉,左方機車直行,在未有警示的狀況下,因左方機車來不及煞車,與右方汽車發生碰撞;在有警示的狀況下,左方機車會得到右方汽車左轉的訊號,並且提前煞車,避免碰撞(圖8)。
然後是左轉碰撞預防系統V2B,此情境為右方汽車左轉且左方自行車直行,在未有警示的狀況下,因左方自行車車來不及煞車,與右方汽車發生碰撞;在有警示的狀況下,左方自行車車會得到右方汽車左轉的訊號,並且提前煞車,避免碰撞(圖9)。
情境3:左轉碰撞預防系統V2V(有車輛阻擋
)
情境3的實驗設備如表5所示,此情境(圖10)為A車與C車都要左轉,B車要直行,在未警示的狀況下,B車被C車造成視線阻擋,看不見A車的行進方向,而發生碰撞;在有警示的狀況下,B車會提前得知A車的方位,並且提前煞車,避免碰撞。
實驗場域B接近十字路口,此場域規劃進行十字路口穿越碰撞的情境(圖11),在此場域進行兩種情境,包括:情境4-穿越碰撞預防系統(有遮蔽物阻擋)、情境5-穿越碰撞預防系統(有停止號誌)。
情境4:穿越碰撞預防系統V2V(有遮蔽物阻擋)
情境4的實驗設備如表6所示,此情境(圖12)為A車與B車都是直行方向,在未警示的狀況下,A車會被遮蔽物阻擋,看不見B車而發生碰撞;在有警示的狀況下,A車會提前得知B車的方位,並且提前煞車,避免碰撞。
 |
| 圖6-12 |
情境5:穿越碰撞預防系統V2V(有停止號誌)
情境5的實驗設備如表7所示,此情境(圖13)為A車與B車都是直行方向,在未警示的狀況下A車無視停止號誌減速與B車造成碰撞;而在有警示的狀況下,A車感知停止號誌而停車後再開,並與B車相會。
在實驗場域C中,視線屏蔽急下坡彎道三角叉路(圖14),此場域規劃進行彎道追撞的情境,在此場域進行一種情境,即情境6-追撞預防系統。
情境6:追撞預防系統V2V
 |
| 表6-8 |
情境6的實驗設備如表8所示,此情境(圖15)為A車與B車都要行進彎道,在未有警示的狀況下,B車未注意A車的減速而發生碰撞;在有警示的狀況下,B車會先得到A車將要減速的訊號,與A車保持安全距離。
檢視實驗結果 作為改進依據
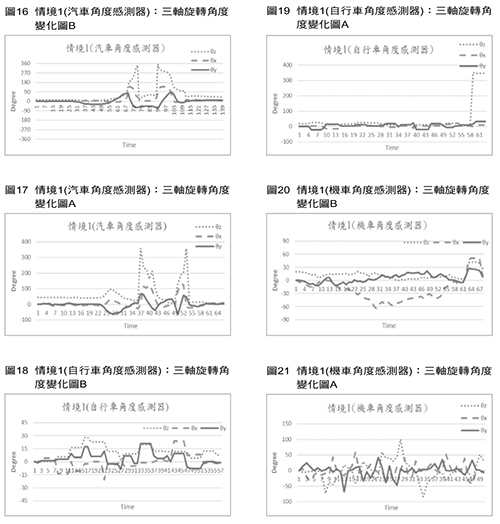
分析情境1中汽車、機車與自行車的量測數據(圖16∼21),、與分別代表仰俯角、傾角與轉角,當Time值為67時,值遞增代表車輛進行右轉。值上限為360度,當值超過360度,會從0繼續往上遞增,由圖16可知,值有兩次超過360度,這也代表方向盤往右方轉動兩圈;機車與自行車的部分,由於是直行方向,、與不會有劇烈變化(圖18、圖20),其中圖B代表未警示狀況,圖A代表警示狀況。
 |
| 圖16-21 |
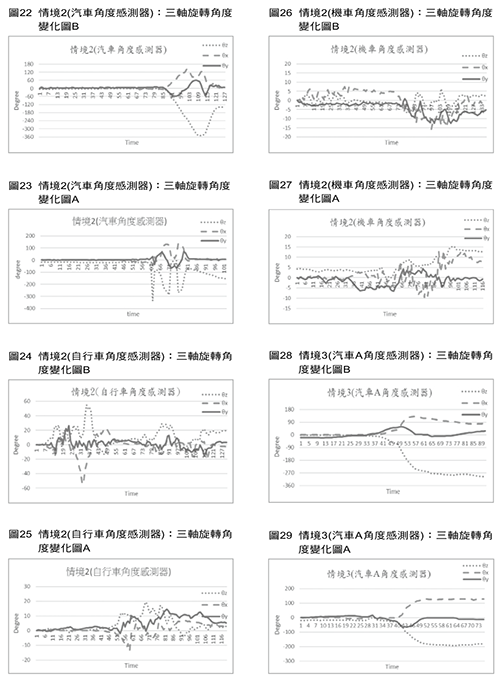
分析情境2中汽車、機車與自行車數據(圖22∼27),、與分別代表仰俯角、傾角與轉角,當Time值為85時,值遞減代表方向盤往左轉方向轉動(圖22);機車與自行車的部分,由於是直行方向,、與不會有劇烈變化(圖24、圖26),其中圖B代表未警示狀況,圖A代表警示狀況。
 |
| 圖22-29 |
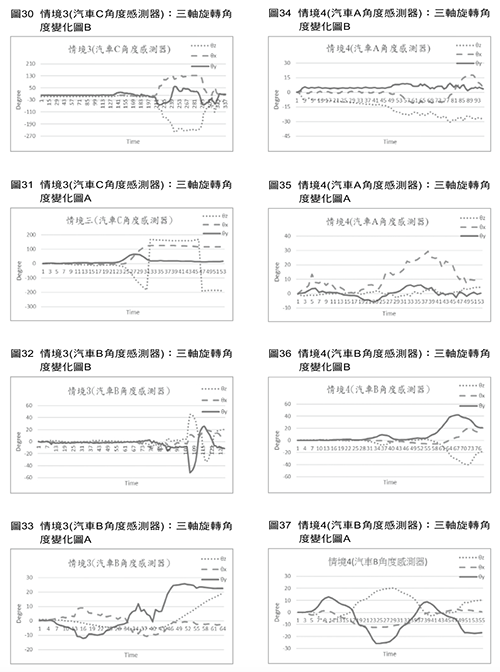
分析情境3中汽車A、汽車B與汽車C的數據(圖28∼33),、與分別代表仰俯角、傾角與轉角,當A車數據中Time值為37時,值遞減代表方向盤往左轉方向轉動(圖28);C車數據中Time值為197時,值遞減代表方向盤往左轉方向轉動(圖30);由於B車為直行方向,數據不會有太大變化(圖32)。其中,圖B代表未警示狀況,圖A代表警示狀況。
分析情境4中汽車A與汽車B的數據(圖34∼37),、與分別代表仰俯角、傾角與轉角,A車與B車都是直行方向,、與不會有劇烈變化(圖34、圖36),其中圖B代表未警示狀況,圖A代表警示狀況。
 |
| 圖30-37 |
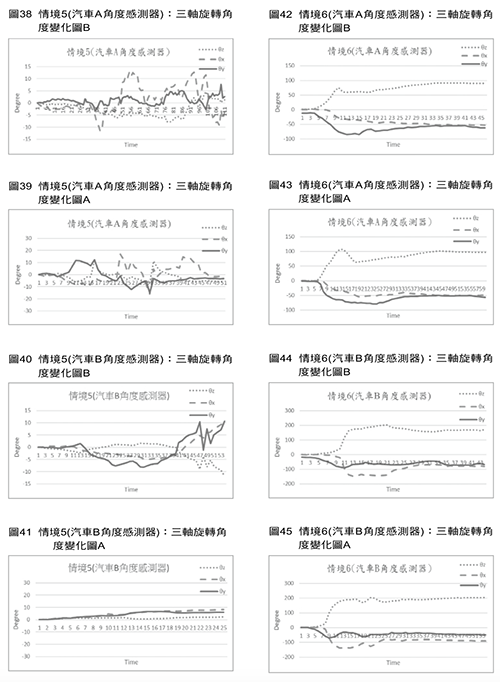
分析情境5中汽車A與汽車B的數據(圖38∼41),、與分別代表仰俯角、傾角與轉角,A車與B車都是直行方向,、與不會有劇烈變化(圖38、圖40),其中圖B代表未警示狀況,圖A代表警示狀況。
分析情境6中汽車A與汽車B的數據(圖42∼45),、與分別代表仰俯角、傾角與轉角,A車與B車都是行進右彎彎道,在圖42中,當Time值為4時,值遞增代表方向盤往右轉方向轉動;而圖44中,Time值為5時,值遞增代表方向盤往右轉方向轉動。其中,B代表未警示狀況,A代表警示狀況。
 |
| 圖38-45 |
完善車聯網服務系統 徹底改善台灣交通安全
二輪車道路相關安全輔助服務,透過號誌、偵測器及事故統計資訊,將周圍環境可能發生的危險通知駕駛,可降低車禍事故的發生。採用陀螺儀的三軸旋轉角度量測,收集駕駛行為數據,可做為未來分析駕駛行為大數據資料與駕駛行為-回饋系統調整方法,建立車聯網服務系統的發展基礎,提升台灣的交通安全。
(本文作者郝敏忠、林壽煦皆為國立高雄第一科技大學電腦與通訊工程系教授,林啟盛為資訊工業策進會智慧網通系統研究所組長)