先進駕駛輔助系統(ADAS)是指利用安裝於車上各種不同的感測器(包括超聲波雷達、毫米波雷達、攝影鏡頭等)在第一時間收集數據,進行車內外環境、物體辨識和檢測,讓駕駛盡快察覺潛在危險以採取相應的行動,從而提高行車安全。在汽車行業由被動安全轉向主動安全,並最終實現自動駕駛的發展進程中,先進駕駛輔助系統不可或缺。
ADAS市場持續加溫 視覺解決方案紛出籠
基於視覺的先進駕駛輔助系統應用包括主動式巡航控制、先進的照明系統、盲點檢測、防撞、路口交通警報、緊急制動、車道保持系統、追尾預警、環視、停車輔助、行人檢測、訊號檢測等,透過前視、後視、360度環視等攝影鏡頭來實現。受到政府指令、消費欲望及自動駕駛的趨勢推動,預計汽車內的攝影鏡頭將從當前的一至四個激增至未來的五至八個,甚至有些汽車的內置攝影鏡頭還將達到十二至十五個。
目前已有廠商提供全面的攝影機模組方案,包括高可靠影像感測器、影像訊號處理器(ISP)、影片放大器、二極體、直流對直流(DC-DC)、低壓降穩壓器(LDO)、控制區域網路(CAN)收發器等元件,乃至模組化的成像平台,用於VGA攝影機和高解析度攝影機。
倒車視覺/前視攝影機方案需求大增
倒車應用方面,半導體元件供應商針對類比攝影機提供ASX340AT/342AT/ 350AT、ASX344AT和結合影像訊號處理器使用的百萬畫素感測器AR0140AT。
ASX340AT是當前標準解析度市場的解決方案,具備四分之一吋光學格式,VGA解析度(640×480),整合影像串流處理器(IFP)、影音編碼器、微控制器(MCU),提供複雜的處理如色彩恢復和校正、銳化、灰度、鏡頭陰影校正、自動白平衡和自動曝光,靈活且功耗低,無需額外處理晶片就能設計汽車後視影像系統。
而ASX342AT/350AT定位為高成本效益,ASX344AT則帶有魚眼矯正功能。AR0140結合影像訊號處理器AP0100AT可用於類比方案,結合AP0102AT可支援RGB888的輸出,而針對高解析度數位的低壓差分訊號(LVDS),可採用AR0140AT結合AP0101AT或AP0102AT。AR0140採用DR-PIX技術,適用於微光和高動態範圍場景。影像訊號處理器AP0100AT、AP0101AT和AP0102AT分別支援100萬、120萬和200萬畫素。
除此之外,還包括前視攝影機的應用,其主要用於先進駕駛輔助系統和數位視訊錄影機(DVR)。針對先進駕駛輔助系統,包括正向碰撞警告、車道偏離警告、自動遠光燈控制、交通訊號識別、行人檢測、主動巡航控制、盲點檢測、夜視等。
MT9V024方案可用於VGA,AR0132/AR0136用於720p影像,AR0231用於1080p影像。MT9V024是三分之一吋全域快門互補式金屬氧化物半導體(CMOS)感測器,提供出色的高動態範圍(HDR)性能,增強的近紅外線(NIR)性能提供微光下卓越的成像品質。而AR0132和AR0136是百萬畫素CMOS感測器,同樣提供出色的高動態範圍和微光性能。
AR0231是230萬畫素CMOS感測器,3.0微米(μm)背照式(BSI)畫素和DR-Pix技術提供高靈敏度和低暗電流,高動態範圍達120dB,可消除高頻率發光二極體(LED)閃爍,支援ASIL-B。針對數位視訊錄影機,有200萬和300萬畫素1080p感測器AR0230/AR0237和AR0331可供選擇。
全景停車目前在中國大陸的汽車應用中越來越廣泛,一般使用四個攝影鏡頭,再進行拼接處理。全景停車的開始階段以類比攝影鏡頭為主,成本效益比較高。現在,車廠在類比方案中很多都使用到ASX340AT(其特性見前述的倒車視覺攝影機方案),也可使用相類似的MT9V127。
全景停車影像市場火熱 高動態範圍應用擴張
此外,還可採用AR0140AT搭配可輸出類比訊號的AP0100AT。用於全景停車的高解析度數位攝影鏡頭主要有低壓差分訊號和乙太網路兩種傳輸方式。對於低壓差分訊號,可採用AR0140AT、AR0132AT結合AP0101AT。對於乙太網路的傳輸方式,則可採用AR0140AT、AR0132AT配合支援乙太網路輸出的AP0201AT。
另一個值得關注的焦點則是高動態範圍,簡而言之,它是指既包含高光部分,又保留暗部細節,用於汽車視覺系統,可提高影像資訊的精確度從而提升安全性。高動態範圍技術透過採用多重曝光,使得高光部分不會過飽,暗部細節還能保留。晶片上多重曝光的感測器如AR0132、AR0140、AR0230等,而高動態範圍色彩處理晶片系列則有AP010x、AP020x,高動態範圍影像與非高動態範圍影像的效果比較,如圖1所示。
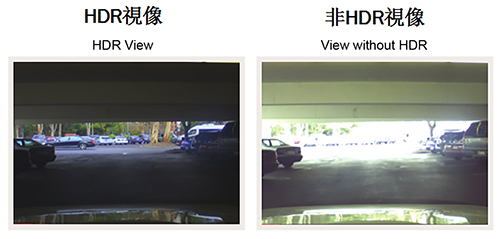 |
| 圖1 高動態範圍影像與非高動態範圍影像比較 |
ISP重要性日增 影音訊號傳輸變多元
強大的影像訊號處理器配合影像感測器,將能夠實現更出色的性能,其關鍵特性包括184oNTSC延伸、魚眼矯正(Dewarp)及縮放、左/右後視、三聯式、行跡線疊加等(圖2)。
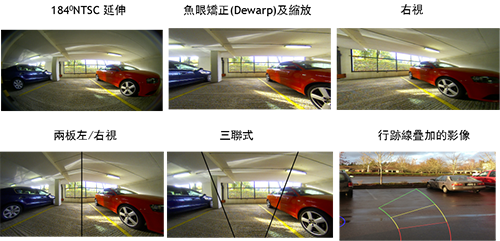 |
| 圖2 ISP關鍵特性比較 |
目前用於傳輸影音訊號的主要有複合影像廣播訊號(Composite Video Broadcast Signal, CVBS)、低壓差分訊號和乙太網路等三種方式。CVBS介面主要用於傳輸類比影音訊號。ASX340/ASX342/ASX344、ASX350和影像訊號處理器AP0100是可支援CVBS介面的感測器。
低壓差分訊號介面廣泛用於傳輸高解析度數位影音,可傳輸百萬畫素甚至更高的二百萬畫素影音,且支援多個攝影鏡頭的傳輸,可使用影像訊號處理器AP0101、AP0102、AP0202。
隨著汽車內娛樂和視覺等系統的增加,大數據的傳輸需求不斷上升,乙太網路被視為將來車內主流的傳輸方式,它可支援多個百萬甚或二百萬畫素高解析度影音的傳輸。乙太網路介面用於傳輸H.264/MJPEG影音,影像訊號處理器AP0200、AP0201可支援乙太網路的影音傳輸。
功能安全愈益重要 多晶片方案成主流
現代汽車內的多個應用都須要符合汽車行業功能安全標準ISO 26262,尤其是先進駕駛輔助系統。
根據不同的先進駕駛輔助系統的子應用,須要實現ASIL B至ASIL D的不同等級,而影像感測器AR0231已符合ISO26262 ASIL。
在傳統的設計中,影像感測器與影像訊號處理器是分開的,以減少功耗。為均衡先進駕駛輔助系統方案的性能、功耗和尺寸,多晶片方案因而誕生。將AR014xAT感測器和影像訊號處理器AP010xAT封裝在單一iBGA封裝內(圖3),大幅節省空間,具備系統單晶片(SoC)特性和高動態範圍、STE及疊對(Overlay)等豐富的特性和功能。
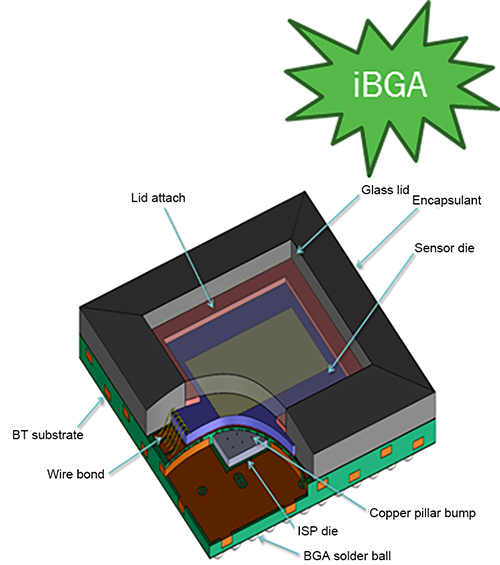 |
| 圖3 iBGA封裝示意圖 |
提供開發廠商參考設計 推模組化汽車參考平台
開發廠商不僅可提供全面的高性能元件,還提供全系列的技術支援,以幫助客戶加快開發及測試進程。
例如模組化的MARS參考設計,主要包含鏡頭、感測器、協同處理器和介面等四部分,客戶可根據應用需求,靈活選用不同的感測器和協同處理器,直接嵌入其攝影鏡頭系統中(圖4)。
 |
| 圖4 MARS可直接嵌入客戶的攝影鏡頭系統 |
如此一來,簡化和加速概念驗證和開發,並提供可擴展性,使實驗室的概念可在真實條件下隨車測試。MARS可用於全系列的汽車攝影機應用,包括環視、後視、前視、車艙內手勢識別、駕駛眼睛監控等。
ADAS勢不可擋 相關技術看俏
先進駕駛輔助系統在汽車由被動安全轉向主動安全並最終實現自動駕駛的發展過程中,發揮了舉足輕重的作用。汽車視覺先進駕駛輔助系統半導體廠商,憑藉於汽車攝影機感測器領域的技術優勢和市場經驗,為汽車前視、後視、環視及車艙內應用提供全面的高性能元件和全系列技術支援,而最新推出的MARS參考設計以簡潔的外形提供,協助設計人員加速開發進程和顯著減少投放工程資源。