無刷直流(BLDC)馬達與傳統有刷馬達相比,具有更高的能效、更長的使用壽命、更精巧的外形、更低的噪音和更高的可靠性,這些優點使得BLDC愈來愈常出現在汽車應用中,用來取代傳送帶和液壓系統,提供額外功能以及提高燃油經濟性,並同時降低維護成本。
由於電勵磁必須與轉子位置同步,因此BLDC馬達在運行時,通常需要一個或多個轉子位置感測器。由於成本、可靠性、機械包裝的原因,特別是當轉子在液體中運行時,馬達適宜在無位置感測器的條件下運行,即通常所謂的無感測器運行。
對於汽車用BLDC控制系統來說,希望能做到印刷電路板(PCB)尺寸小、整體物料清單(BOM)成本低以及簡單可靠、低功耗等特點。針對這系列的需求,已有廠商推出針對汽車三相無刷馬達的單晶片解決方案,例如飛思卡爾(Freescale)的S12ZVM家族,此種BLDC馬達控制解決方案,有助於加快從直流(DC)到BLDC馬達的過渡。
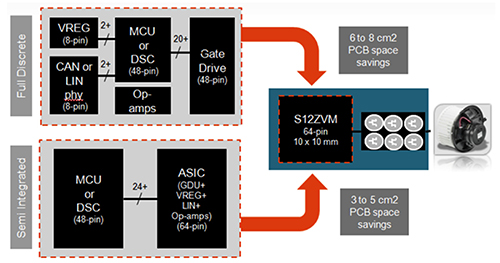 |
| 圖1 三相無刷馬達單晶片整合方案 |
S12ZVM系列將微控制器(MCU)、金屬氧化半導體場效電晶體(MOSFET)閘極驅動單元、電壓調節器和本地互聯網路(LIN)實體層這四個系統元素結合到一個單晶片解決方案中(圖1)。通常實現這四個功能需要二至四顆晶片。與其他分立式解決方案相比,此種透過晶片上整合的方式可將印刷電路板所占物理空間減少50%。除此之外,該系列也提供諸多不同的產品版本,支援控制區域網路(CAN)和LIN通訊協定,具有多種記憶體容量和封裝選項。這將允許客戶可重複使用硬體和軟體設計,為空調風機、雨刮器、燃油泵和水泵等應用開發真正的平台解決方案。
無傳感BLDC控制系統設計
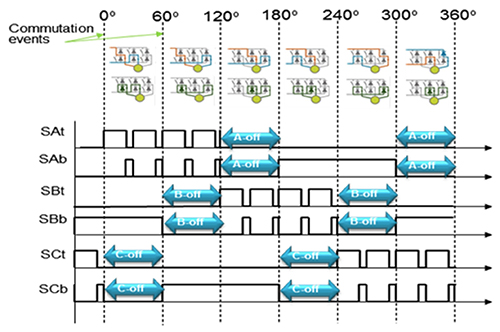 |
| 圖2 三相六拍單極性控制策略 |
如圖2所示,三相BLDC馬達控制可採用三相六拍的控制方法,每隔60個電角度進行換向控制,同時對三相橋脈衝寬度調變(PWM)控制可採用單極性控制策略,上橋採用PWM控制,下橋可直接導通與地相連,其優點在於控制簡單,較低的金屬氧化物半導體(MOS)管開關損耗及較低的電磁相容(EMC)噪音。
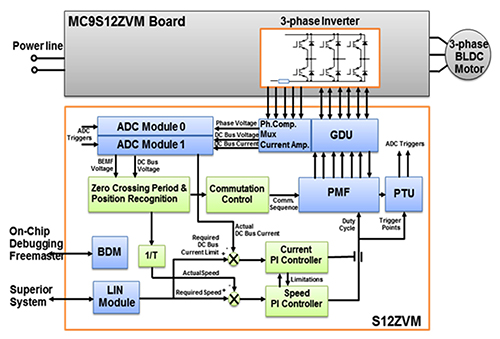 |
| 圖3 BLDC無傳感控制框圖 |
圖3為採用S12ZVM的無傳感BLDC控制系統設計框圖,除了三相橋與取樣電阻外,整個控制都可以由S12ZVM內部來實現。當採用三相六拍控制策略時,只需要一個取樣電阻來檢測電流的大小,S12ZVM內部有運算放大器可以對電流訊號進行放大並透過AD模組進行取樣,同時還可以將放大的電流訊號經過比較器與給定的電壓進行比較做過流保護。
在圖3中,深色部分為S12ZVM的硬體模組,而淺色部分則由軟體來實現功能。AD模組取樣相電壓,DC BUS電壓和工作電流,經過過零點檢測演算法來確定換向控制並計算BLDC實際速度,速度環的PI控制器對實際速度和設定速度差值進行計算,從而決定PWM的工作週期(Duty Cycle)來控制BLDC馬達轉動力矩,保證實際速度按照設定的速度運行。
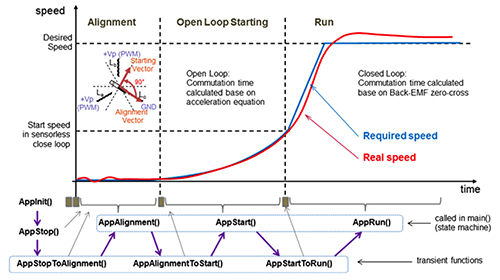 |
| 圖4 BLDC無傳感控制啟動流程 |
由於無法確切知道BLDC無傳感馬達的初始位置,其啟動過程要比帶霍爾(Hall)感測器BLDC馬達的啟動過程複雜。如圖4所示,啟動過程包括Alignment階段、Open Loop Starting階段,以及最終的Run階段。在Alignment階段,控制器同時施加相同工作週期的PWM給A相與B相,C相則與地相連,這可將BLDC馬達穩定在一個已知位置。工作週期大小與持續時間取決於BLDC馬達特性和負載大小,通常持續時間在100毫秒(ms)到500毫秒之間。
當Alignment過程結束後,就進入Open Loop Starting階段,由於反電動勢與轉子轉速成正比,在極慢的轉速下,反電動勢的幅值將非常低,所以很難檢測到過零點。
因此,當馬達從靜止狀態啟動時必須採用開環控制,待有足以檢測到過零點的反電動勢時,才轉而採用反電動勢檢測控制並進入Run階段。當進入到Run階段後,BLDC就採用速度閉環控制,過零點由反向電動勢檢測所得。
依靠霍爾感測器的運行實現起來非常容易,但除去霍爾感測器可降低系統成本並提高可靠性。
無傳感位置檢測實作
BLDC馬達轉動時,每個繞組都會產生名為反電動勢的電壓,根據楞次定律(Lenz Law),其方向與提供給繞組的主電壓相反。
反電動勢主要取決於三個因素:轉子角速度、轉子磁體產生的磁場、定子繞組的匝數。
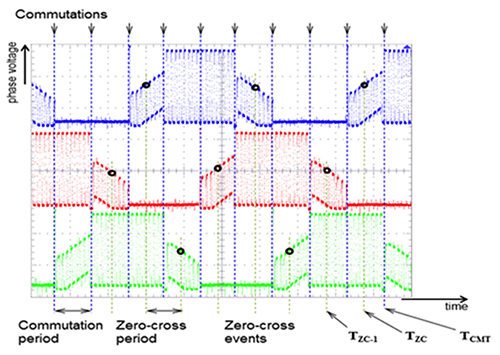 |
| 圖5 BLDC反電動勢過零點 |
當採用感測器時,微控制器會根據霍爾訊號來決定BLDC換向點。當採用無傳感控制時,則可以採用反電動勢過零點檢測來決定正確的換向點(圖5)。
當在一個恆速情況下,切換週期等於過零點週期,途中圈圈代表著過零點發生的地方,一般處在兩個切換點的中間。所以通過timer得出上一次過零點時間以及本次的過零點時間,就可以計算出正確的換向點(公式1)。
......................................................公式1
其中,TZC:實際過零點時間,TZC-1:上次過零點時間,TCMT:下次換向點時間,AdvanceAngle:範圍在0.3~0.5的常數(取決於馬達參數)。
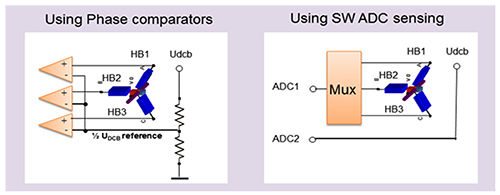 |
| 圖6 BLDC反電動勢過零點檢測方法 |
所以,成功檢測反電動勢過零點就決定了無傳感控制BLDC成功的關鍵。通常有硬體和軟體兩種方式能檢測到反電動勢過零點(圖6)。第一種是採用三個硬體比較器,在某切換週期中不加電的一相可以透過相應的硬體比較器與1/2的Udcb電壓進行比較,在PWM週期中On有效時,比較器能夠檢測到反向電動勢電壓變化從而得出過零點的位置。第二種方式可以用軟體AD取樣來實現,在BLDC馬達運行過程中,使用類比數位轉換(ADC)對不加電的一相進行取樣,與此同時Udcb會被另一路ADC模組同時取樣,然後軟體可以即時的根據兩個取樣數值進行過零點判斷。
採用比較器的方式可以降低中央處理器(CPU)的負擔,但軟體取樣的方式更加地靈活,可以更加精確地檢測出過零點的位置。以S12ZVM為例,其同時整合了實現上述兩種方式的硬體模組,內部包括三個相位比較器來實現硬體比較,AD模組包括兩個獨立的類比數位轉換器(AD Converter)來實現軟體取樣,兩個AD Converter可以對反向電動勢電壓與Udcb電壓的同時取樣,確保過零點檢測更加的準確。
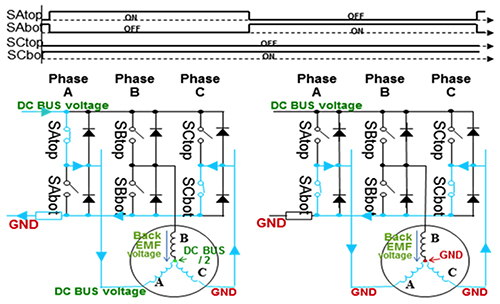 |
| 圖7 BLDC反電動勢取樣點 |
當採用軟體取樣的方式時,必須要選擇合適的取樣點。圖7顯示在一個PWM週期中通電情況下,反向電動勢電壓的變化情況。在PWM週期中ON有效時,SAtop管被打開接DC BUS,SCbot也打開與地相連,所以電流會從DC BUS經過SAtop管流過A相與C相,再經過SCbot管流入地,由此可見三相的中間點電壓可以近似為DC BUS/2的數值。
此時在B相上產生基於DC BUS/2電壓的反向電動勢就可以被檢測出正向與反向,如此一來,也意味著過零點的電壓能夠被成功的檢測到。在PWM週期中處於OFF時,此時A相與C相的下橋分別與地相連,三相的中間點也就近似於與地相連,在這種情況下,工程師很難檢測到B相反電動勢的過零點。
由此可以發現,對反向電動勢的檢測只有在PWM週期中處於ON狀態時才能實現。對AD模組來說,就須要與PWM進行同步,配合定時延遲模組,可以在PWM週期中ON狀態即將結束之前進行精確取樣。
S12ZVM有PTU可程式設計觸發單元模組,其內部包含一個16位元(Bit)計數器,兩個獨立的觸發發生器,可以配置高達32個觸發事件,同時可以根據PWM模組的Reload事件來啟動PTU觸發過程。
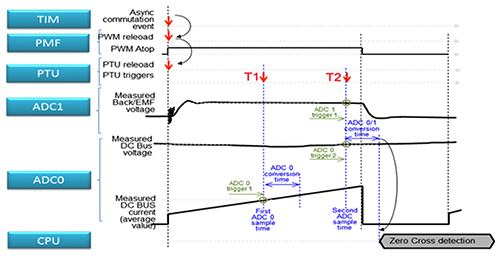 |
| 圖8 BLDC反電動勢取樣策略 |
圖8可以具體地理解無傳感檢測反向電動勢的取樣過程,PMF/PWM產生一個PWM Reload訊號給PTU單元,PTU單元中的16位元計數器(Counter)開始計數,PTU會在T2這個時間點產生一個觸發事件來觸發ADC0與ADC1分別對反向電動勢與DC BUS電壓同時取樣,當ADC取樣轉換結束後就產生一個ADC中斷,在ADC中斷服務副程式中就可以做反向電動勢過零點的判斷等操作。
(本文作者任職於飛思卡爾)