在上期文章中,主要是提出一種新穎的無線網路控制系統架構,運用一種TCP-Like模糊流量控制(Fuzzy Flow Control, FFC)演算法與控制傳輸協定(Control System Transfer Protocol, CSTP),改善控制系統在網際網路環境中系統的控制穩定度。
而在本期文章中,則是試著引入新的技術--Type-2模糊控制技術來設計馬達控制器,此控制器最大特色是引入Type-2模糊控制改善網路不確定因素造成的影響,原理為利用網路端點對端點延遲時間(End to End Delay, EED)及其變動量來推論傳送端傳輸速率,最後由網路模擬軟體NS-2(Network Simulation ver.2.27)比較傳輸控制協定(Transmission Control Protocol, TCP)、使用者資料段協定(User Datagram Protocol, UDP)、即時傳輸協定(Real-Time Protocol, RTP)、應用層為Type-1模糊控制器(Type-1 Fuzzy Flow Controller)之CSTP協定與本文所提出應用層為GA-Type-2模糊控制器的CSTP協定,比較最後的結果,顯示本文提出之應用層為GA-Type-2模糊控制器的CSTP協定,綜合性能指標效果較好。
網路技術與馬達控制發展息息相關
網路基本概念於1980年被提出,至今已20多年,隨著網際網路技術越來越純熟,透過網路發展的各種應用也不斷被開發出來,如網際網路控制系統(Networked Control System, NCS)、遠端操控系統、視訊會議、遠距教學、影音串流傳輸等。而透過網際網路進行控制最大的優點為降低線路的複雜度和毋須親自到現場就可以進行遠距離操作,但是利用網際網路進行控制時,會有封包延遲及封包遺失的問題,若控制器本身未考慮上述問題,一旦封包發生遺失或者封包延遲時間過大時,閉迴路控制性能會大受影響。若將時間延遲及封包遺失問題考慮在控制器內,則會讓控制器設計方面更加困難,甚至難以實現。
根據上述問題,本文將設計一個架構在網路協定應用層裡的控制器來改善。利用控制系統傳輸協定結合適用於網路流量控制的基因Type-2模糊控制器,來降低封包延遲時間、封包延遲時間抖動率及封包遺失率,達到好的流量控制服務品質(Quality of Service, QoS)。
在模糊控制方面,則使用有別於以往的Type-2模糊控制,因為網際網路傳送封包的時候,會發生封包順序錯誤及時間漂移(Clock Drift)等問題,這些不確定因素可能會影響傳統Type-1模糊控制器的強健性。因此,引入Type-2模糊控制,藉由Type-2模糊控制能容忍不確定因素存在的優勢,增強當網路不確定因素存在時控制器的強健性。
Type-2模糊控制過程中的「模糊化」會得到上界、下界兩個模糊歸屬度,有別於傳統Type-1模糊控制只有一個模糊歸屬度,而影響「上下界模糊歸屬度」的關鍵在於「Type-2模糊集合Uncertainty」大小的設計,因此在這個地方引入基因演算法,調整「Type-2模糊集合Uncertainty」參數,來達到較好的流量控制輸出響應。相對地,Type-2模糊控制過程中「解模糊化」得到的輸出並不是一個單值,而是一個區間論域輸出。
為了得到好的單值輸出,作法上特別加入另一組「輸出比例因子λ」的基因,其中0≦λ≦1,而本文提到的控制器「動態切換論域機制」是針對網際網路中的網路層隨著時間、頻寬、路由協定路徑、使用者多寡等因素封包延遲時間會超出預設的模糊論域而設計。最後,藉由綜合基因演算法Off-line來調整「Type-2模糊集合Uncertainty」和「輸出比例因子λ」,達到更好的流量控制QoS。
結合基因演算法 打造Type-2模糊流量控制架構
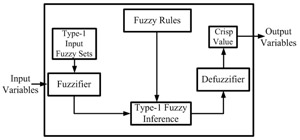 |
| 圖1 Type-1模糊控制示意圖 |
相較於Type-1模糊控制四個基本架構流程:模糊化(Fuzzifier)、模糊推論(Type-1 Fuzzy Inference)、模糊規則庫(Fuzzy Rule Base)和解模糊化(Defuzzifier)(圖1)。Type-2模糊控制的架構流程(圖2)則多了形式減速器(Type-reducer)的過程,此流程目的是將Type-2區間型輸出轉為Type-1形式的單值輸出,且Type-2模糊控制流程中,模糊化、模糊推論及解模糊運算與Type-1模糊控制也有差異,以下將介紹流程與其設計的方法。
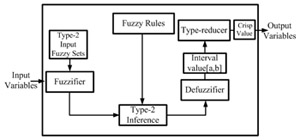 |
| 圖2 Type-2模糊控制示意圖 |
Type-2模糊化就是把輸入模糊控制器的變量數值轉變成模糊語言變量的歸屬度值。本文中兩個前件部輸入分為EED及其變動量ΔEED,相較於Type-1模糊化不同的地方是,Type-2糢糊集合是一個區間型三角模糊集合(圖3),因此當輸入變量數值經Type-2模糊化後,會得到上、下界兩種歸屬度。其中,每個「模糊集合Uncertainty」值設定將影響之後的模糊推論,即對整個控制器的性能影響甚大,在本文中也將提出對應方法來設定每個「模糊集合Uncertainty」值。
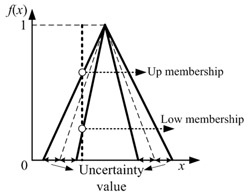 |
| 圖3 Type-2模糊控制示意圖 |
模糊推論為模糊控制器的核心,由模糊規則庫和模糊推論引擎所組成。而Type-2模糊推論是使用「Firing interval to rule output FOU」法(圖4)。相較Type-1模糊推論不同的地方,Type-2模糊推論後會得到上界、下界兩個輸出模糊集合。
前件部一、二分別使用五個語意變數共二十五條規則(表1)。其中,若EED很小(VS)且ΔEED負數很大(VN)時,表示封包在網路中傳送非常地順暢,因此設定傳送速度為最快(VF)。
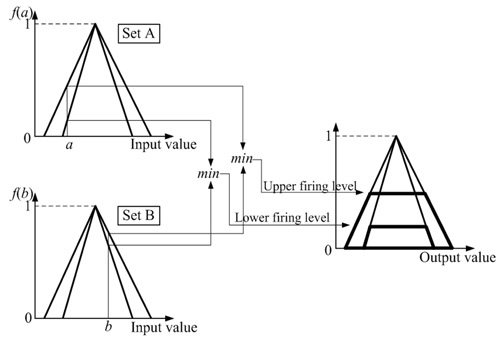 |
| 圖4 Type-2模糊推論示意圖 |
解模糊的用意在於將模糊推論所得的推論結果量化為輸出變數的歸屬函數值。Type-2解模糊化可得到區間論域如(1)式所示,而(2)、(3)式分別為論域最大值與最小值,而最大值與最小值可利用Karnik-Mendel Iterative Procedure得到。此解模糊化方法與Type-1解模糊化法的「平均中心法」(Center Of Sets, COS)如(4)式類似,差別在於Type-1解模糊化後是個單值輸出(Crisp Value Output),而Type-2解模糊化後是個區間論域輸出(Interval Value Output) [Yl(x),Yu(x)]。
Type-2-Center-of-sets (Type-2-COS):
Ycos(x) = [Yl(x),Yu(x)] ...........................(1)
...........................(2)
...........................(3)
其中M為總規則數,fr介於Type-2模糊推論的上界與下界之間,為第r條規則時,後件部模糊集合上界三角函數的中心點,為第r條規則時,後件部模糊集合下界三角函數之中心點。
Type-1-Center-of-sets (Type-1-COS):
...........................(4)
其中M為總規則數;cr為第r條規則時,後件部三角模糊集合的中心點;fr為第r條規則時,經模糊推論得到的歸屬度。
避免基因演算法陷入局部最佳解
由本文可知,影響最後Type-2模糊控制輸出在於圖3前件部「模糊集合Uncertainty」值的設定及解模糊化後得到的區間論域如何轉為單值輸出。因此本研究在前件部一、二每個「模糊集合Uncertainty」值設置一組基因及輸出「比例因子λ」設置一組基因使(1)式輸出Ycos(x)轉變為(5)式,共十一組基因。
Ycos(x) =λ(Yl(x)+(1-λ)(Yu(x) ...........................(5)
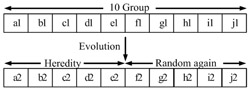 |
| 圖5 基因演化示意圖 |
如圖5所示,基因演算法的每組基因採用十個族群,每個組群八個染色體,演化過程中,下一代第一個族群(a2)為上一代最佳族群,而二至五個族群(b2~e2)為上一代最佳的前五個族群經重生、交配、突變得到,剩餘五個族群(f2~j2)則重新隨機產生。目的在於能保留演化中最佳的基因,又能以較好的基因做演化,加上每次有新隨機族群產生,使基因演算法不易陷入局部最佳解。
基因演算法適應函數如(6)式所示,藉由網路三種性能指標來搜尋基因最佳解,而(7)式方程式是用來與其他協定比較用的。
...........................(6)
...........................(7)
其中EEDerr為平均誤差如(8)式所示,EEDd為延遲時間標準差,EED1為封包遺失率,EEDa為平均延遲時間,而α=5.81、β=10、γ=2.714三組參數是利用初始代基因流量控制的數據,計算三種性能指標平均值後,取其權重相等而決定。
...........................(8)
EED(t)為當時量測到的EED值,EEDT為設定的穩態EED目標值,n為EED數據的總數。
NS-2網路流量控制模擬軟體實驗
本文以網路模擬軟體NS-2進行四個流量控制實驗測試,圖6為本文的網路環境示意圖,模擬兩個傳送端同時傳送資料的網路情形。s1傳送端可以設定四種協定,協定(A)為應用層為規則數四十九條Type-1模糊控制器的CSTP協定(CSTP-Type-1),協定(B)為應用層為規則數二十五條GA-Type-2模糊控制器的CSTP協定(CSTP-GA-Type-2),協定(C)為TCP,協定(D)為RTP,s2傳送端則固定使用UDP傳輸協定,再經由路由器r1和r2分別傳送至接收端d1及d2,其中路由器頻寬為9Mbit/Drop-tail。
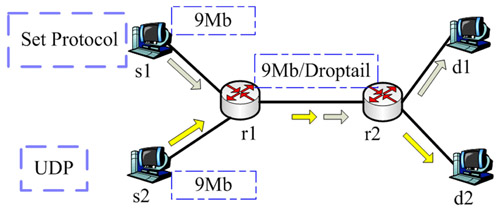 |
| 圖6 網路模擬環境 |
基因演算法參數中,交配率與突變率分別為0.8與0.2,演化350代,在本文提出的協定(B)穩態延遲時間能接近RTP協定,因此EEDT設定0.0465,而實驗四的EEDT則設定0.0625與原始協定作比較。實驗一至三基因演化中的適應函數值如圖7,最後得到的基因參數如表2,而實驗四EEDT為0.0625的適應函數演化如圖8,最後得到的參數如表3。其中V1~V5參數分別為前件部一的五個「模糊集合Uncertainty」值,V6~V10則為前件部二的五個「模糊集合Uncertainty」值,λ為輸出比例因子。
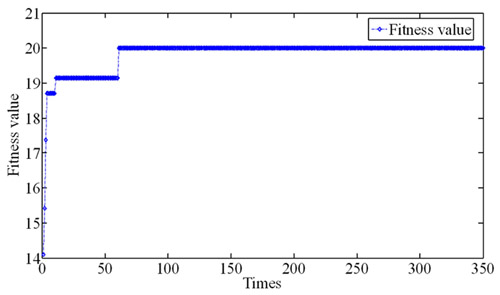 |
| 圖7 實驗一至三適應函數演化圖 |
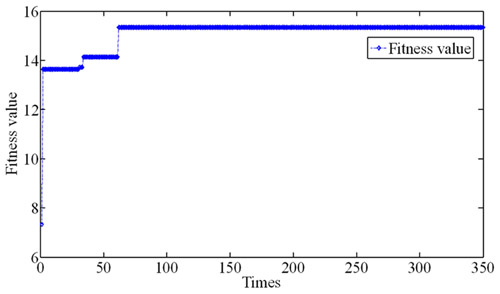 |
| 圖8 實驗四適應函數演化圖 |
本次實驗的目的在測試各種協定在網路頻寬不改變及前件部沒有加入雜訊的正常情況下,各種性能指標的表現,由圖9與表4觀察可知,本文提出之協定(B)能控制EED穩態值接近先前設定的EEDT且EEDd最小即延遲時間的抖動率很小,最後比較Performance文提出之協定(B)皆優於其他三個。
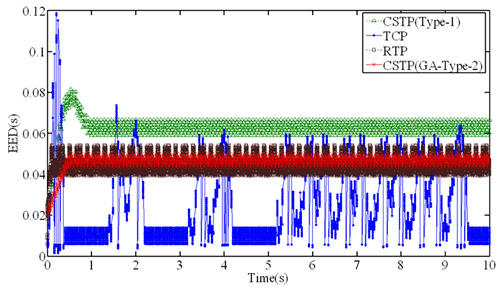 |
| 圖9 實驗模擬結果 |
(本文作者任職於資策會網路多媒體研究所)