據Gartner最新預測,2017年個人與商用無人機的市場規模將高達60億美元,三年後更將成長到112億美元,且出貨量將達300萬架,因此,無人機已被視為未來的明星產業。商用無人機競爭激烈,唯有發展專業技術,建立競爭門檻,才能避免淪為價格廝殺。
無人機的風行緣起於以空拍為主要用途的四軸飛行器,隨之發展出各種創新應用,如:送貨無人機、作戰無人機與載客無人機等,引發了各界對於無人機未來應用的憧憬;2016年大陸「雙11」購物季開打,京東以無人機送貨為宣傳重點,宣稱可以無人機送貨解決廣大農村最後一公里的配送難題。
另外,中國中科院最新宣布已將目前的長航程、大型無人機「騰雲機」,發展成具備「電子偵蒐及干擾」作戰功能的無人電戰機。杜拜將在今年推出「EHang 184」載客無人機,能夠承受一名體重100公斤以下的乘客,同時乘客還可以把小手提箱放在隔間裡。
近年來Amazon、Walmart、UPS、FedEx、樂天、淘寶網等物流及零售業者亦紛紛投入無人機進行商業用途測試,據Gartner最新預測,2017年個人與商用無人機的市場規模將高達60億美元,三年後更將成長到112億美元,且出貨量將達300萬架,因此,無人機已被視為未來的明星產業。
無人機分類與應用
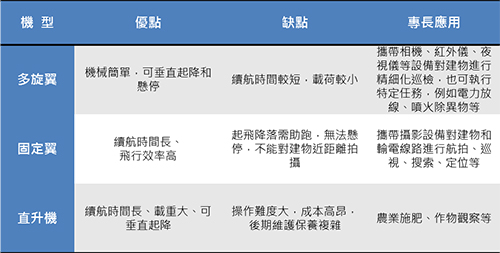
若以功能進行分類,無人機可分為四大種類(表1):
 |
| 表1 無人機的分類與應用 |
依據應用的不同,無人機的續航力、性能及配備也會有所不同。此波無人機市場中最受矚目的當屬商用類無人機市場,商用機不再僅是單純的無人空拍器,而是能執行農業植保、管線巡檢、警用巡視、防災救災、搜尋救援、環境監測及娛樂廣告等任務的飛行機器人;最近已有美國無人機業者利用無人機搭載4G LTE設備,成功利用無人機提供網路訊號,暫代因災受損的基地台。
而商用無人機也被廣泛應用在動物監測上,澳洲農場以及泰國國家公園,以無人機代替人類巡邏,可充分掌握野生動物行蹤,同時預防農損以及打擊非法盜獵,可有效地減少人員與動物的傷亡;亦有國內廠商引進生技公司的生物防治技術,結合無人機創新應用投入政府對抗登革熱的防疫計畫。這些持續增加的創新應用,推動了劃時代的空中產業革命。
根據法新社近日報導指出,軍用無人機市場預估2024年前將挑戰倍增,突破100億美元(約新台幣3308.7億元)。可以說軍用無人機的出現已是必然,且未來將不再侷限於視覺上的偵察和辨識,各國競相強化其無人機之匿蹤、配備和武器功能,並納入軍隊作戰系統之中。
無人機機型
無人機和飛機一樣具有多種機型(表2):
 |
| 表2 無人機機型 |
無人機如同載客或載貨用飛機之組成,硬體部分包含電池、引擎、材料、微機電、感測器、嵌入式系統等多種零組件;軟體部分則利用到人工智慧、資料分析處理等技術。所以開發廠商唯有在創新應用之中,加強領域專門技術,才能超越競爭者,贏得市場。
專業技術-建立競爭門檻
商用無人機競爭激烈,唯有發展專業技術,建立競爭門檻,才能避免淪為價格廝殺,以下為數個創新應用案例分享:
電力巡檢無人機
因高壓輸電線周圍存在很強的電磁場,無人機上的陀螺儀、電子羅盤等感測器又容易被電磁干擾而失去精準度,所以此類無人機需要設計較強的抗電磁干擾能力,同時根據作業需求還需配備足夠的電池容量或燃料以滿足巡檢行業較常操作時間的需求。
娛樂廣告無人機
根據金氏世界紀錄,「最多無人機同時飛行」的世界紀錄曾由 Intel持有,數量達500台之多,以無人機搭配交響樂成為耳目一新的空中螢光秀。而今年廣州億航更完成了一千台無人機編隊進行廣州元宵晚會的商演。
此外,經濟部工業局執行的「產業升級創新平台輔導計畫」,其中經緯航太透過該計畫,成功研發碳纖複合材料之無人機機體,並整合地面導控站,發展國產的飛控電腦及定位定向系統,讓台灣無人機的技術能力向上提升一個等級。
而經緯航太更引進生物防治技術,將無人機用於釋放雄性公蚊,利用紅色螢光蛋白基因來追蹤監測疫情抑制成果,再據以評估下次釋放公蚊數量。聯合國病媒控制委員會已經證實並認定此一技術在健康及環境上不會造成威脅,並已經在多國取得執照且實際使用,實證結果也顯示具減少90%病媒蚊的卓著成效。
專業技術-感測器融合算法解析
廠商除發展專業應用領域外,亦可發展自有專業技術,無人機自動控制與感測器演算法,需要融合加速器、陀螺儀、電子羅盤、氣壓感測、超音波及光流等感測器融合技術,此乃國內微控制器廠商的專長之一,可協助國內無人機廠商快速建立技術門檻。
以國內微控制器廠商-新唐科技為例,其提供多感測器融合的函式庫與圖形化工具,幫助客戶快速上手進行系統校正。其姿態感測融合算法的函式庫可提供每小時小於15度且具溫度補償的零點飄移,更新率達1kHz以上(1ms回算一次),水準誤差小於1度,方位誤差小於1.5度,單晶片並可支援兩組感測器運算,也支持使用者自選感測器,不受限於選擇特定型的感測器。感測器融合算法架構圖如(圖1)。
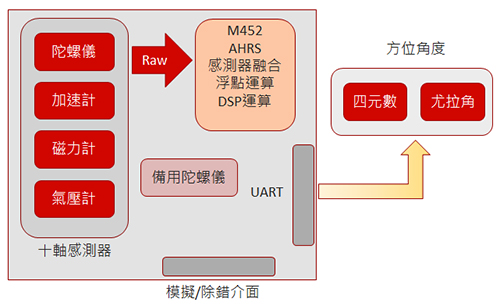 |
| 圖1 感測器融合算法架構圖 |
在常見的感測器誤差問題中,與加速度計相關的問題是感測器與電路板不平行,在高角度(60至90度)的感測精度下降;與陀螺儀相關的則是平轉的零點角度飄移,溫度造成的隨機誤差;與電子羅盤相關的是磁場扭曲(Soft Iron)及磁場偏移(Hard Iron);要解決以上的問題,皆須通過演算法不斷地進行補償或校正。相關的校正有加速度計的快速Z校正,全面校正(6個方向),1度的精確度計算;陀螺儀校正的陀螺儀中心校準(Drift Cancel),陀螺儀比例校準,陀螺儀飄移需小於15度/每小時;羅盤校正的三軸全回轉,軟磁干擾與硬磁干擾消除,及1.5度的精確度計算。
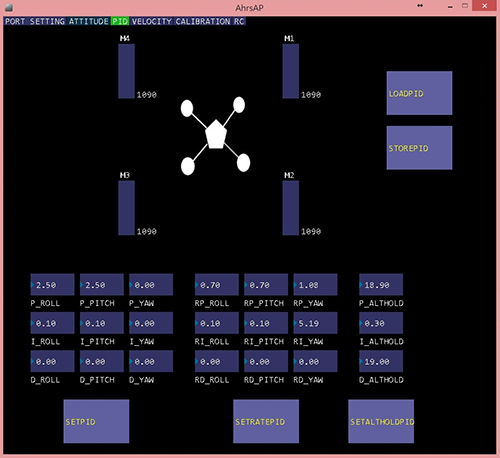 |
| 圖2 PID算法控制調測工具 |
而電機控制方面,需要採用PID算法控制,微控制器廠商亦提供了調測工具:
如採用專業的姿態運算資料庫,將可提高系統高精準度姿態量測,融合10軸感測器以達到快速的姿態更新率(1,000Hz以上),取得穩定的PID控制系統和完整的電腦端應用介面,以順利達成系統量產之工程需求。
新唐科技提供的解決方案與函式庫、開發概念原型機所需的飛控板和簡易遙控器以及完整的開放源程式範例,可協助業者快速完成產品概念設計,建立自有的專有技術,達成量產目標。
在這個快速創新的時代,唯有善用既有設計解決方案,快速整合產業鏈中各廠商優勢設計,才可即時因應市場所需,隨時滿足市場上對於無人機之創新應用與服務需求。
(本文作者為新唐科技物聯網技術發展處技術督導)