各家國際車廠皆陸續發表L3等級汽車,車廠如何讓汽車擁有高度自駕特性,雷達感測器是其中的關鍵技術之一,本文將探討光學雷達協助自動駕駛技術的進程。
許多人夢想可以輕易穿梭往來不同地方,這個夢想在影集霹靂遊俠(Knight Riders)中的人工智慧霹靂車K.I.T.T.或電影第五元素(The Fifth Element)中的車輛得到了體現。現代的汽車越來越接近這些未來願景,而各式各樣的感測器技術在其中扮演著重要角色,其中最具潛力的技術是:光學雷達(Lidar)。
光學雷達就像雷達(Radar)一樣,是一種用於探測和測距的方法。兩者都使用與蝙蝠相同的回聲定位方法,它們會發射超音波,並根據反射波來探測物體或獵物的位置。雷達使用的是無線電波,而光學雷達則是使用光波。
光學雷達感測器使用一個脈衝雷射二極體發出一個光脈衝,如果光脈衝碰到障礙物被反射回來,感測器會偵測到它。只要測量飛行時間(ToF),也就是光波發射與接收之間的時間,即可計算出感測器和障礙物之間的距離(圖1)。
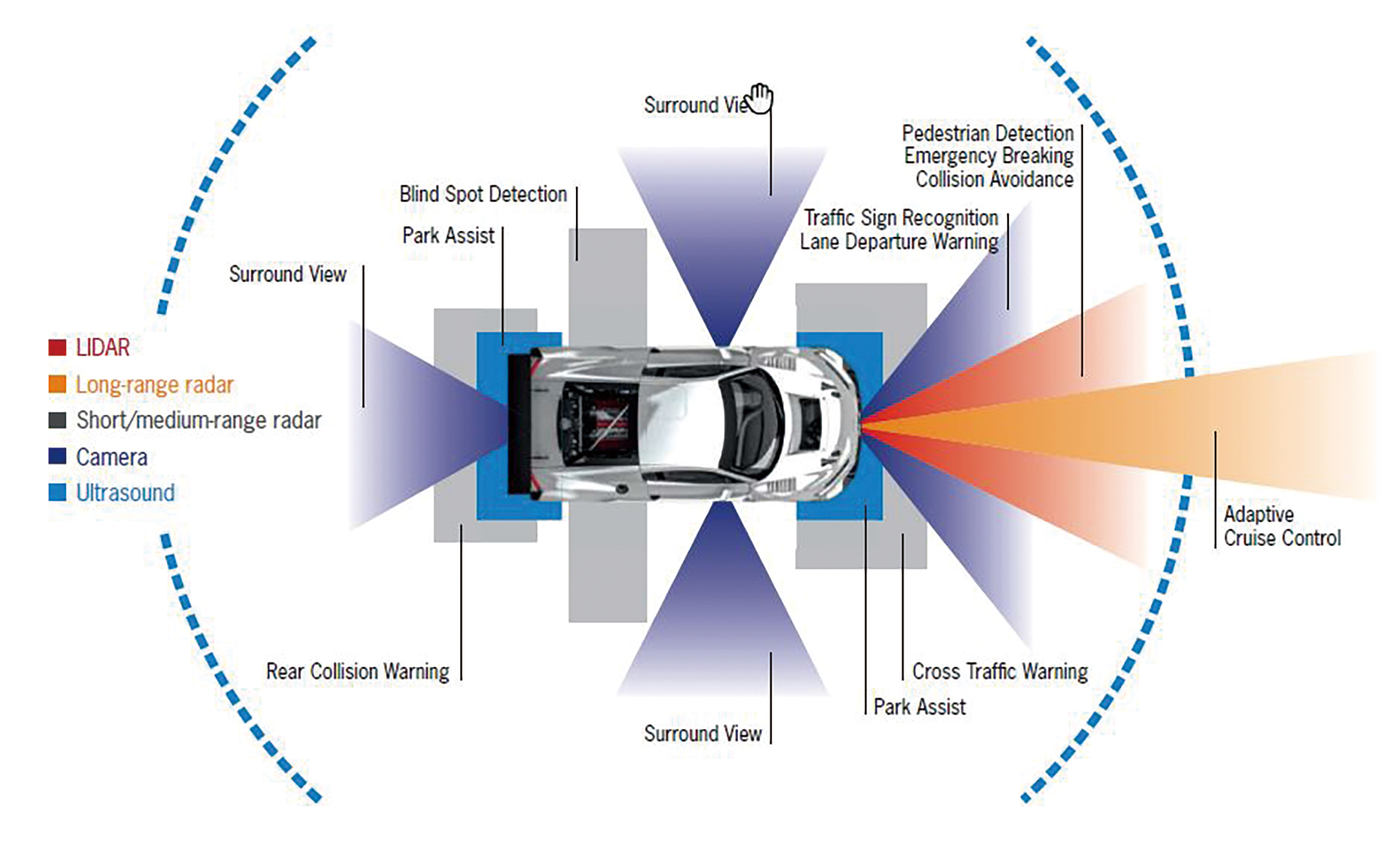 圖1 雷射元件應用圖示
圖1 雷射元件應用圖示
高靈敏度探測器
光波觸及物體時會朝許多方向反射,所以探測器的涵蓋範圍越廣闊,所得的環境測像就越精確,因為它可以偵測到更多的反射。目前的光學雷達感測器使用8、12或16個二極體的崩潰光電二極體(APD)陣列。每個二極體代表全圖像的一個畫素,這意謂著除了陣列的大小之外,二極體之間的距離(等於畫素數)也會影響感測器解析度;APD的靈敏度也會產生一定的作用。在理想情況下,它們探測到的反射光束痕跡盡可能越少越好(圖2)。
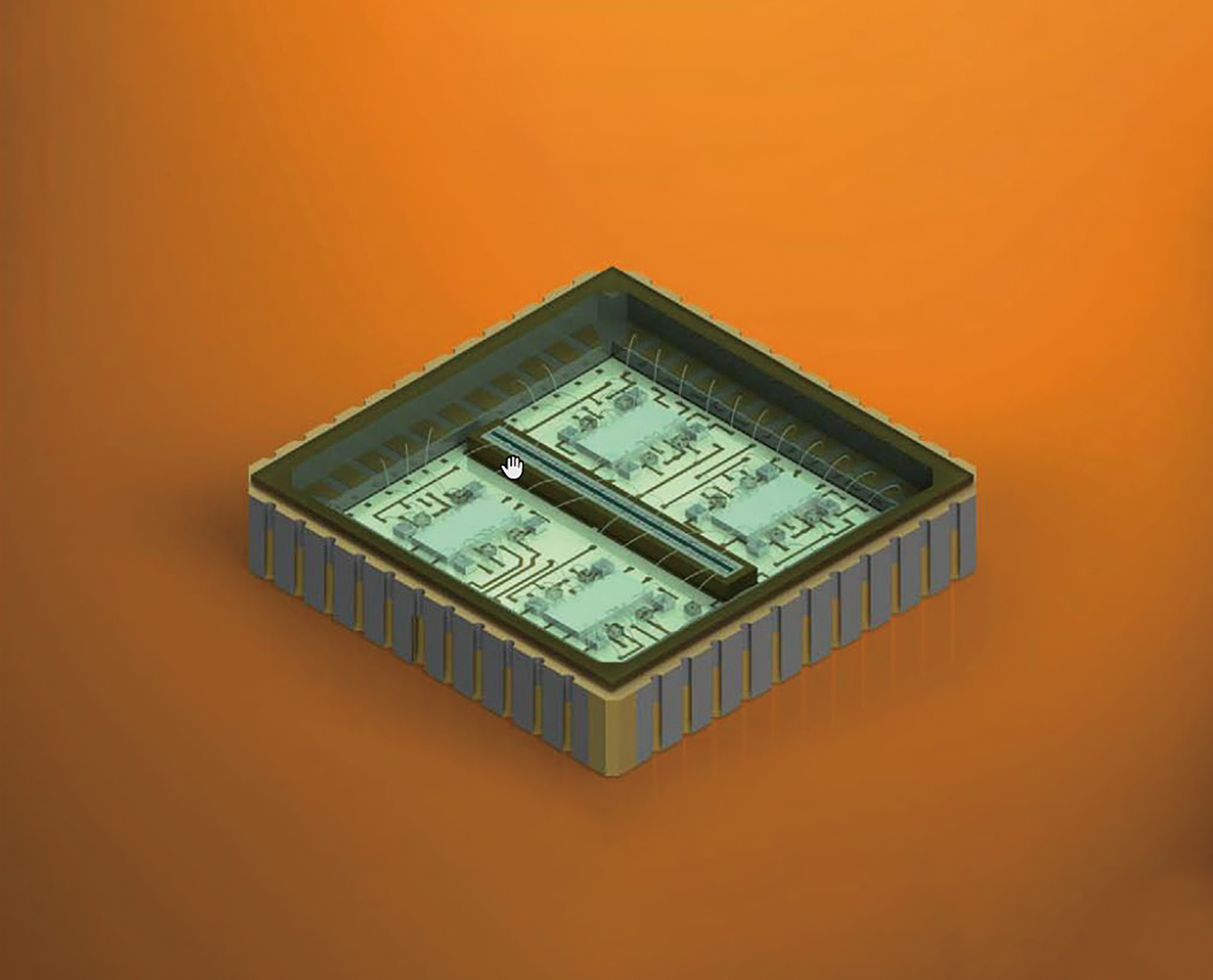 圖2 陣列中的每個崩潰光電二極體(APD)都代表整體圖像的一個畫素
圖2 陣列中的每個崩潰光電二極體(APD)都代表整體圖像的一個畫素
感測器中理想光束
光的脈衝長度對感測器的解析度有極為重要的影響,所以光學雷達製造商會投入大量精力去開發元件和機構設計,以盡可能提供最短的脈衝長度。目前,它們的平均為5ns,最長可達10ns。另一個因素是光束的大小。由於雷射二極體發出的光束非常聚集,它只能測量相同大小的點的距離。如果要用於駕駛員輔助系統是遠遠不足的,當然也就無法用於自動駕駛的汽車上。有多種用於擴大掃描視野(Field of View, FOV)的解決方案,所面臨的挑戰是如何在大範圍的FOV中也能檢測到最小的人臉。
光達對人眼安全程度
光學雷達發展的一個限制因素是眼睛的安全。考慮到雷射光束可能會照射到人的視網膜,尤其是用於道路交通時,確保它不會對眼睛造成傷害是很重要的。人的皮膚也可能受到雷射光束的損害。雷射的監管標準EN 60825-1根據對眼睛和皮膚的危害,定義了各種級別,而且與波長和脈衝長度都有關。有三個例子可說明雷射級別。第1類是屬於無危害或在封閉體中使用的雷射輻射。第2類是屬於400到700nm之間可見光譜範圍內的雷射輻射,最大曝光時間短(最長為0.25秒),對眼睛沒有危害。第4類雷射光即使是散射的,對眼睛和皮膚都有嚴重危害。
快閃光學雷達
擴大FOV的一種方法是利用散射光束,通過寬廣的光束角來擴大FOV範圍。然而,這種情況下的光被稱為快閃光學雷達(Flash Lidar),它是散射的光,而且比聚焦的光束弱得多。即便如此,為了實現遠距離和高解析度,仍是使用輸出功率非常高的1~2kW雷射二極體(圖3)。
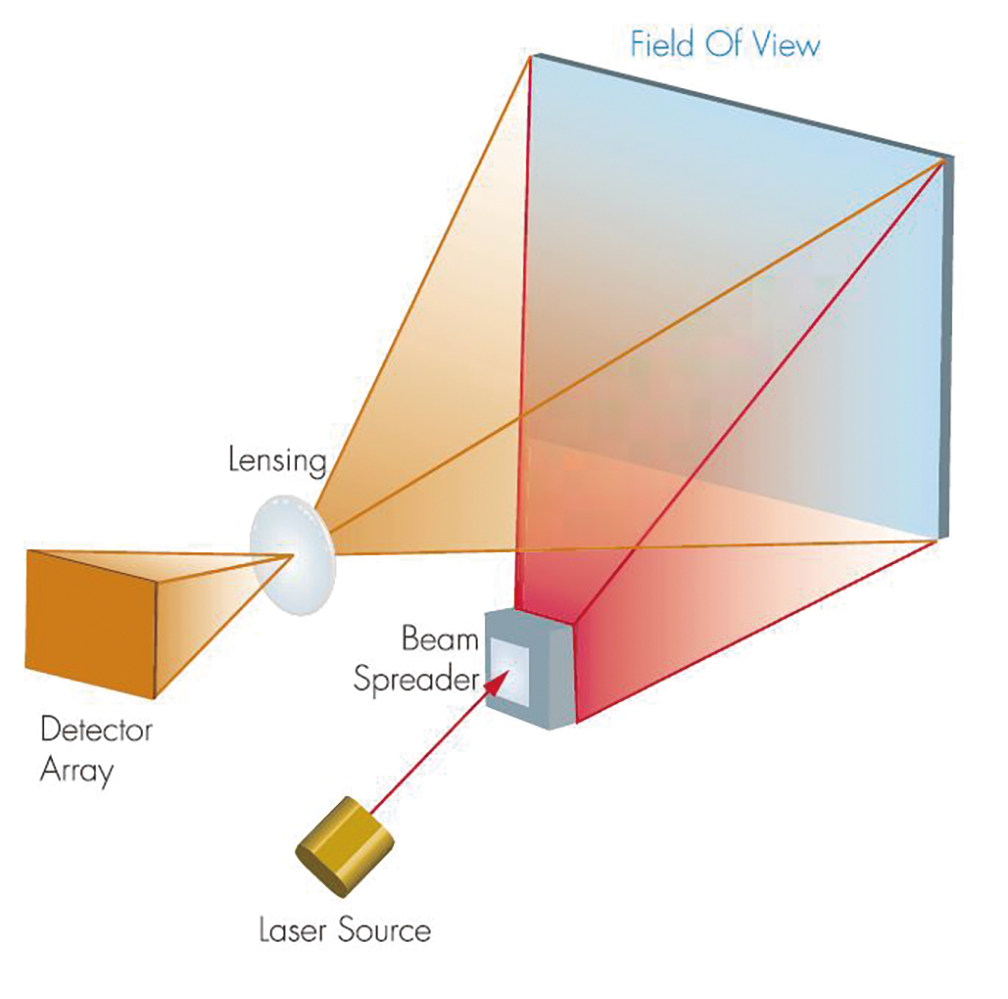 圖3 快閃光學雷達以散射的雷達光束,可擴大掃描視野,在高靈敏度的感測器陣列可偵測到單個光子
圖3 快閃光學雷達以散射的雷達光束,可擴大掃描視野,在高靈敏度的感測器陣列可偵測到單個光子
對於只需要在短距離內探測物體的應用,波長介於850至940nm之間的垂直共振腔面射型雷射二極體(VCSEL)是理想的選擇,它們可以用於強大的二維陣列。對於探測器來說,可偵測到單個光子的高敏感度感測器效果可能更好,也就是業界所稱的單光子崩潰二極體(SPAD)。為了提高射程並考慮強烈陽光照射的情況,德國的佛勞恩霍夫研究機構(Fraunhofer Institute)開發了用於微電子電路和系統的CMOS SPAD探測器。SPAD整合到CMOS製程中,該製程通過汽車產業的認證,並針對光電應用進行了最佳化。如此一來可產生具有高達108瞬時放大、高脈衝率和低雜訊特性的高靈敏度、超快速崩潰光電二極體。
如有廠商Laser Components提供內建CMOS SPAD探測性能的快閃光學雷達感測器SPAD2L192,它是一款用於快閃光學雷達應用的192×2畫素固態CMOS感測器,根據首光子、dToF(direct-ToF)原理來測量距離。單光子探測器可提供非常高的靈敏度和時間解析度,畫素內部的時間至數位值轉換器(TDC)的時間解析度為312.5ps,刻度終點值為1.28μs,可實現192公尺的標稱範圍和4.7公分距離的解析度。
掃描式光學雷達感測器
為了保持光的強度,同時涵蓋大範圍的FOV,掃描光學雷達技術採用了以光束掃描場域的原理。利用內部微小鏡面的旋轉,將光引導到視野範圍內。掃描式光學雷達感測器通常使用1至16個雷射二極體,波長為905nm的邊射型雷射能產生最好的結果,而超過100W的高功率雷射二極體則可實現長達150公尺的範圍(圖4)。
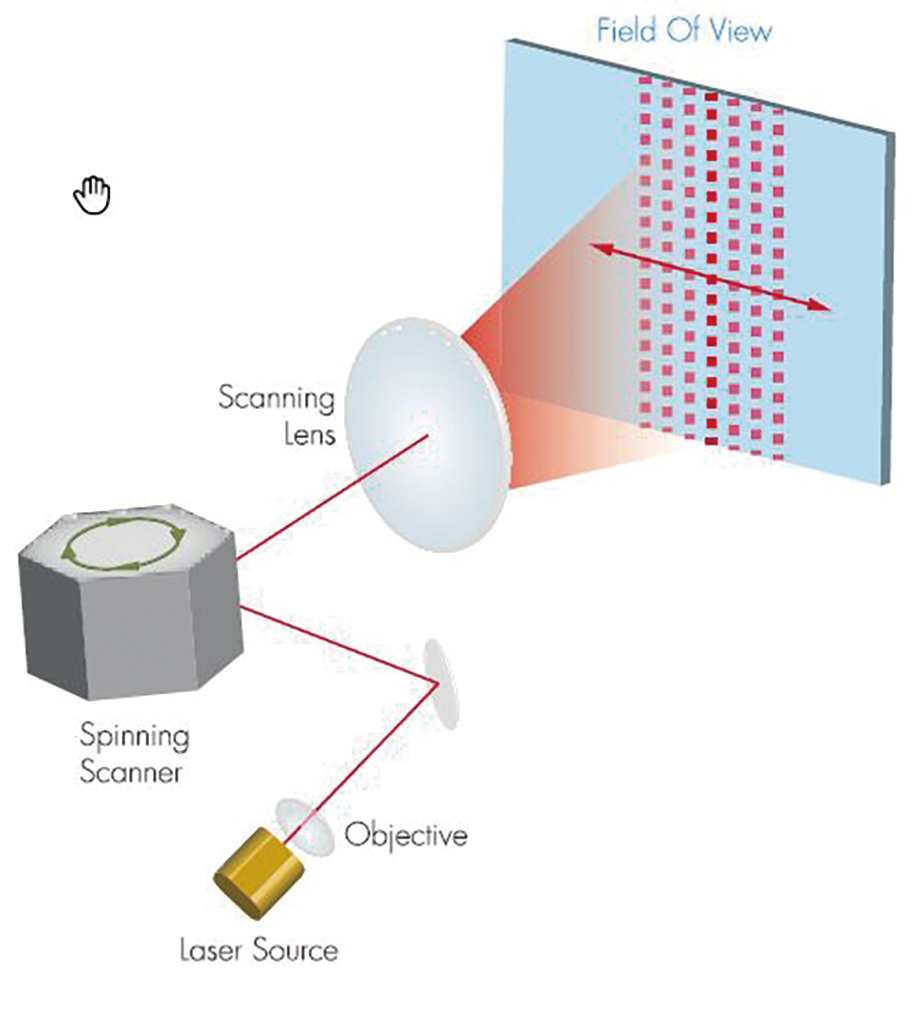 圖4 掃描式光學雷達以脈衝雷射(脈衝雷射二極體或VCSEL)使用旋轉鏡面來掃描視野
圖4 掃描式光學雷達以脈衝雷射(脈衝雷射二極體或VCSEL)使用旋轉鏡面來掃描視野
掃描式光學雷達感測器只要幾個功率相對較低的二極體就足夠了,因此具有良好的散熱性能。這樣可以實現非常高的脈衝率,即使採用905nm波長的情況下,也能保證眼睛的安全。
FOV通常在y軸上是145°,在Z軸上是3.2°。理論上,這項技術應該可以實現360°全景掃描,但在實踐中確實容易出現盲點(光束無法掃描到的鄰近之處),不過還有其他的雷達和攝影鏡頭方案能彌補這項缺陷。可是,由於掃描式光學雷達感測器的尺寸和穩健性較差,並不適合用於車輛應用。它們的尺寸約為10.5公分×6公分×10公分,如果尺寸太大,例如聚光燈這樣的裝置就無法安裝使用。移動的鏡面對於車輛中無法避免的振動、衝擊、灰塵和極端溫度也很敏感。
Laser Components的二極體905DxxUA系列,包括具有單接面(Single-Junction)和多接面(Multi-Junction)設計的脈衝雷射二極體,雷射輸出功率高達110W,波長為905nm。這些元件除了可靠,在密封封裝中能提供優良的散熱穩定性和精確的晶片對位。這使它們適用於距離測量和障礙物偵測、測量設備、光學雷達和許多醫療應用。符合AEC-Q101認證標準的型號還可用於汽車應用。
探測器最好使用Si-APD或Si-APD陣列。因此SAHA系列Si-APD,針對850和905nm之間的波長進行了最佳化。這些半導體材料尤其能提供高效率,而這些脈衝雷射二極體在此波長下也會發光。在微型SMD封裝中,該Si-APD提供高量子效率,因此具有高靈敏度和低雜訊。SAH1Lxx陣列系列有8、12和16個高靈敏度Si-APD,採用LCC-44封裝,帶有保護窗,可提供相同的特性。它們提供特別低的40µm間距,具有12個APD的陣列也可採用14針腳DIL封裝。除了標準陣列之外,還提供具有特定數量和大小的APD客製化陣列。
固態光學雷達感測器仰賴半導體
固態光學雷達感測器是一種更小且更強大的替代方案。這些感測器仰賴半導體而非機械元件來引導光束,其中有兩個版本方案:一個是採用微機電系統(MEMS)模式的鏡面方案,另一個是採用光學相控陣列(OPA)模式的方案(圖5)。
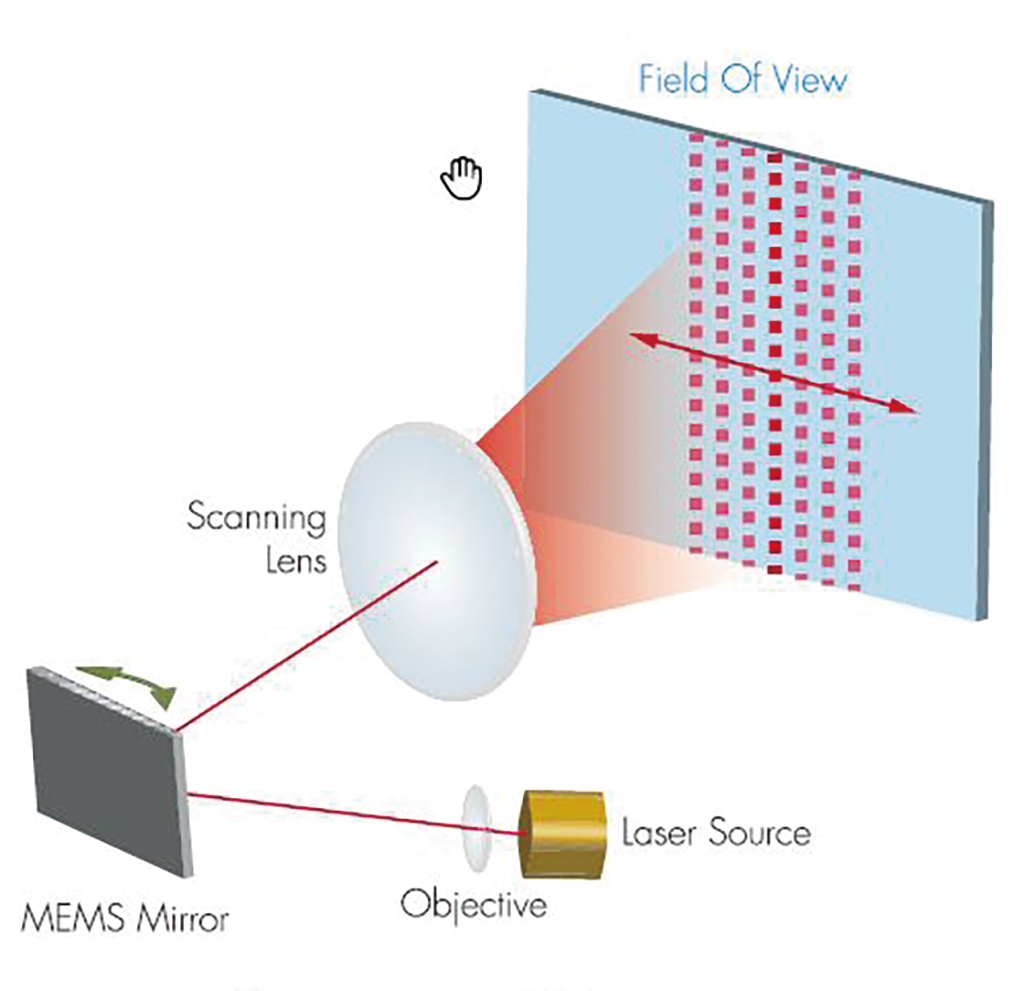 圖5 固態光學雷達以微動的MEMS鏡面將光線反射到不同方向,可擴大掃描視野
圖5 固態光學雷達以微動的MEMS鏡面將光線反射到不同方向,可擴大掃描視野
採用MEMS模式鏡面的光學雷達使用微鏡面矩陣,每一個鏡子的邊緣長度只有幾微米,它們受到靜電場的推動,每秒可在兩個位置之間來回切換幾千次。這些類型的光學雷達已經用在掃描儀檢查或數位光處理(DLP)投影儀等應用上,是一種通過驗證和測試的技術,生產成本相對較低。
然而,用於汽車應用的感測器則需要符合更嚴苛的要求。例如,與POS結帳系統或投影儀相比,汽車需要更大範圍的FOV。由於掃描頻率超過100Hz,目前的解決方案可提供到40°的角度,正在開發中的MEMS系統還具備更大的角度。
至於使用OPA的光學雷達,每個雷射二極體發出的光相位會通過調變器進行調節,以使脈衝能夠覆蓋更大的區域。這項技術目前仍處於研究階段,它的另一些型款是採用一個只有幾平方毫米的矽電路來替代旋轉發射器和探測器單元。為了獲得更高的輸出和更大範圍的FOV,目前正以比一般所用的905nm更長的波長進行測試。舉例來說,1550nm的波長對眼睛無害,但可能會受到下雪或雨天的不利影響,因此還需要搭配其他探測器來使用。
各類感測技術將科幻實現生活中
目前還需要幾年時間才能實現科幻電影中描述的自動駕駛,但無論是自適應巡航控制系統(ACC)、緊急輔助剎車系統(EBA)或車道偏離警告系統(LDW),每一項輔助系統都是通往這個目標所邁出的一步。對於其中許多項技術而言,光學雷達是一個必不可少的要件,絕對應該與其他技術相搭配,例如超音波感測器、攝影相機和雷達解決方案,因為每項技術都有其優勢和劣勢存在。
(本文作者為儒卓力光電產品銷售經理)