隨著全球針對自駕技術越發重視,車用雷達市場規模也不斷擴展。在汽車業朝增加雷達訊號頻寬和提升距離解析度等趨勢發展下,新雷達系統的設計也更仰賴量測設備的精準度。
越來越多汽車配備雷達感測器,以便在關鍵情況下為駕駛提供輔助,進而協助減少事故(圖1)。雷達能夠迅速精準地測量多個物體的徑向速度、範圍、方位角和仰角。正因如此,汽車業將這項技術廣泛應用於先進駕駛輔助系統(ADAS)中。
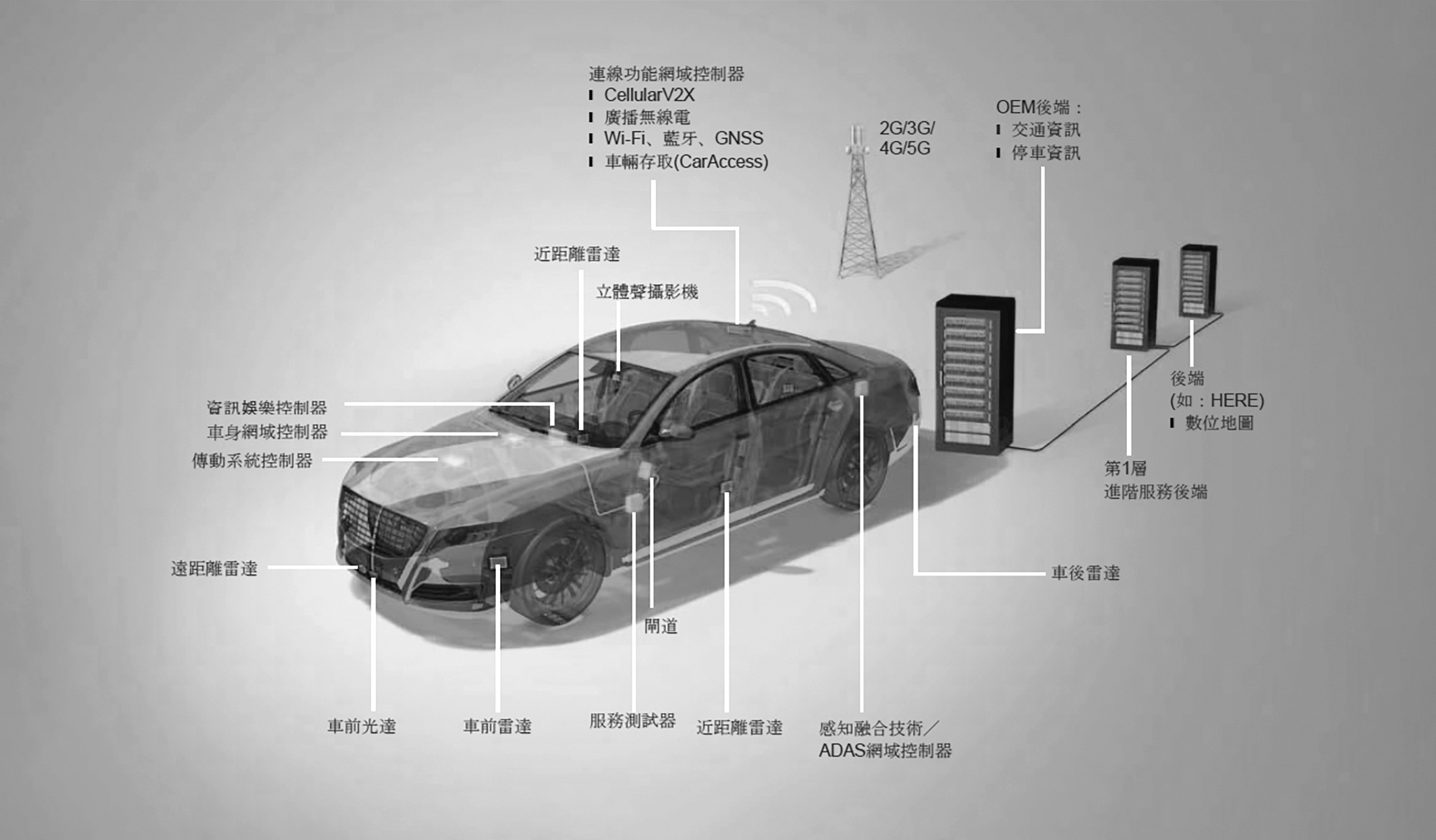 圖1 車用雷達正迅速發展,以提供更出色的行車安全
圖1 車用雷達正迅速發展,以提供更出色的行車安全
圖1說明日後的車輛架構。車用雷達的用途相當廣泛。一般而言,盲點偵測(BSD)雷達的運作範圍為24.05GHz至24.25GHz(無線資源分配:ISM、RR5.150,ITU參照:WRC19、AI1.13、Res.238,Resolves 2),而大多數車用雷達的無線電定位服務運作範圍為76GHz至81GHz。
76GHz至81GHz頻段廣受採用的原因如下:基於法規狀態(WRC-2015的最終法案/結果),只有76GHz至81GHz範圍的車用雷達可宣稱具防干擾保護、感測器套件體積較小、雷達晶片成本較低、有更多頻寬選擇(可提供更高的距離解析度)、在相同的訊號發射期間,77GHz可比24GHz提供更出色的都卜勒(Doppler)解析度、提供更多天線空間等。
對於系統設計者而言,這些新技術均扮演著重要的角色。選擇雷達波形之後,測試與量測精確度對於新雷達系統的開發與啟用也很重要。新的雷達設計需要確保所有軟硬體元件均能在顧及所有考量的情況下,按照預想的方式運作。如此一來,測量設備便需要滿足特定的測量需求與作業。從技術層面來瞭解波形設計是這一切的基礎。為減少設計的不確定性,測試解決方案要能夠發揮效能、提供精確剖析,以解決這些先進設計所將面臨的挑戰。
車用雷達市場趨勢
車用雷達的發展在1978年第一次進行試驗後,便開始有了迅速進展。只不過1978年的第一個版本使用的是連接在車前外部的脈衝雷達,而當今的雷達則已經全面整合,隱藏在設計雷達罩、保險桿或後視鏡之中(圖2)。
 圖2 1978年、1999年和當今的車用雷達
圖2 1978年、1999年和當今的車用雷達
除了車廠普遍從行車安全性與舒適性來考量雷達感測器的安裝,許多雷達供應商均有一個共同的目標,即實現L5等級的完全自動駕駛。如此將會需要在單一車輛上安裝許多不同功能的雷達。
隨著幾乎每一輛新車至少會配備一個雷達,因此雷達產量大幅增加,除促進了車用雷達市場的成長,也為汽車產業帶來重大發展空間。
根據市調統計,全球車用雷達市場規模預計在2023年會達到約100億美元。每個雷達感測器的價格預估為50至100美元,如此一來,每年的雷達產量會達到1至2億。以每年生產的新車數量為7,000萬台,加上L4等級和L5等級自動駕駛所需的雷達數量來估算,這是很合理的推算數據。
現在許多商用汽車雷達的訊號頻寬均小於1GHz。然晶片製造商已經能夠在可擴充的28nm CMOS中,以100MHz/100ns的調變速率,支援訊號頻寬達4GHz至5GHz。因此,接下來的發展趨勢將會是訊號頻寬的增加和距離解析度的提升。
市場上很快就會出現更佳距離解析度和搭載4GHz甚至5GHz訊號頻寬的車用雷達。由於這些雷達的發射和接收天線數量增加了,因此可實現3D成像。
為了實現未來科技並為自動化駕駛鋪路,量測設備必須能支援高頻及寬頻應用,甚至還需要可讓製造商針對汽車用途設計、測試與驗證此類雷達感測器的車載專用檢測設備(圖3)。
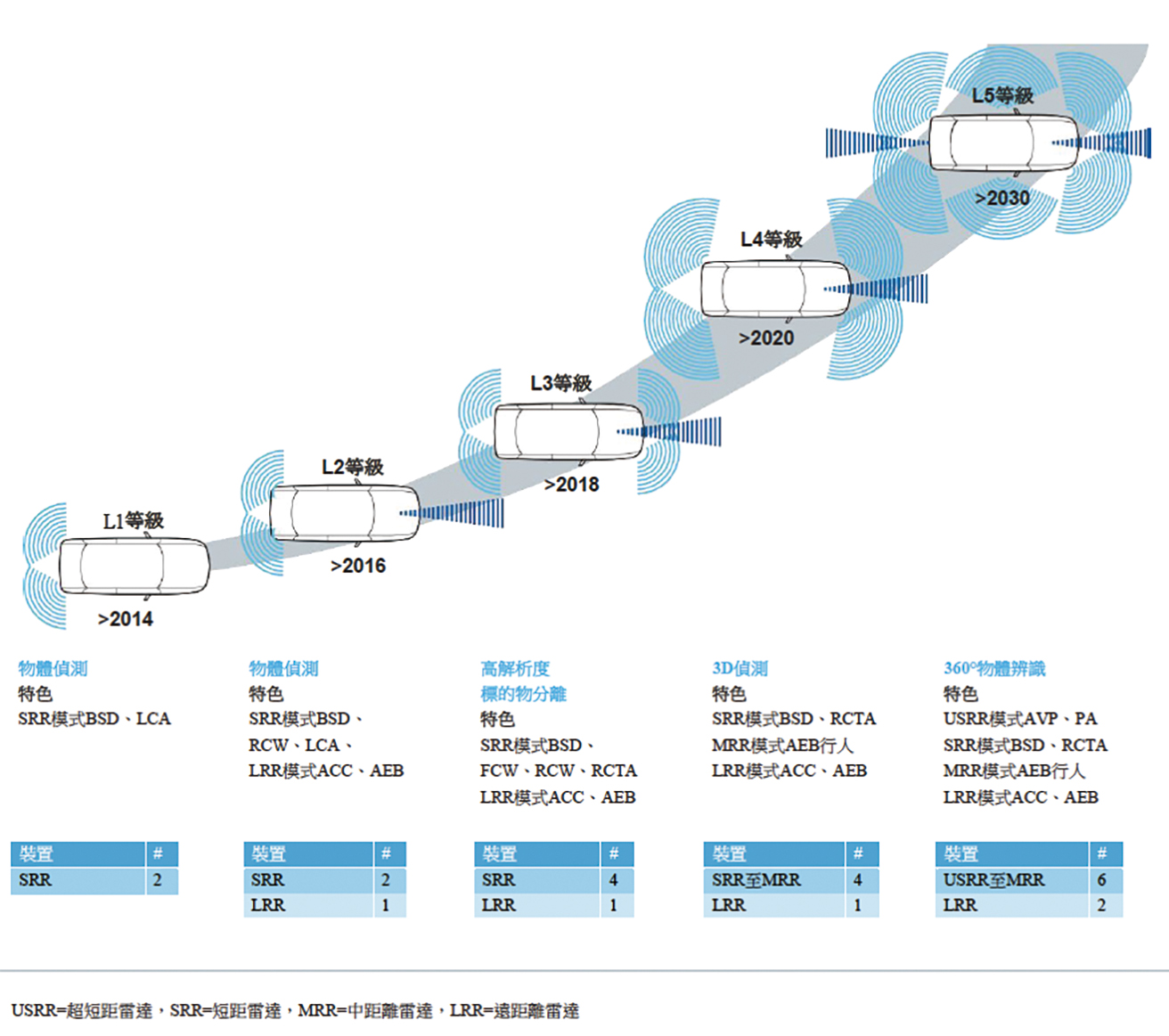 圖3 各等級自動化所需的雷達裝置數量與發展趨勢
圖3 各等級自動化所需的雷達裝置數量與發展趨勢
雷達測量
雷達的具體用途是要在單一測量循環中,同時測得單一物體的距離範圍和徑向速度。距離範圍是透過測量發射與接收訊號的時間延遲所得。徑向速度則是以連續波(CW)訊號或連續脈衝(脈波式都卜勒雷達)來進行測量,由回波訊號的都卜勒位移來判斷是否為移動物體。脈波式都卜勒雷達將執行數次的訊號發射與接收,透過雷達反射訊號的相位改變,來量測都卜勒頻率。
為測量單一測量循環內的範圍與徑向速度,車用雷達會使用各種連續波訊號。和脈衝雷達訊號相較,這些CW波形具備以下主要優勢,也因此適用於車用雷達:理論上沒有盲距、低輸出功率、低硬體複雜性、低製造成本、徑向速度解析度取決於發射時間、距離解析度取決於訊號頻寬,以及即使在高發射訊號頻寬情況下,也可維持低取樣率和低IF濾波頻寬。
距離與徑向速度
車用雷達使用線性調頻連續波雷達(LFMCW)、頻率偏移調變(FSK)、多階頻移鍵控(MFSK)、Chirp序列(CS)等波形。
圖4以發射訊號為例(Chirp序列):
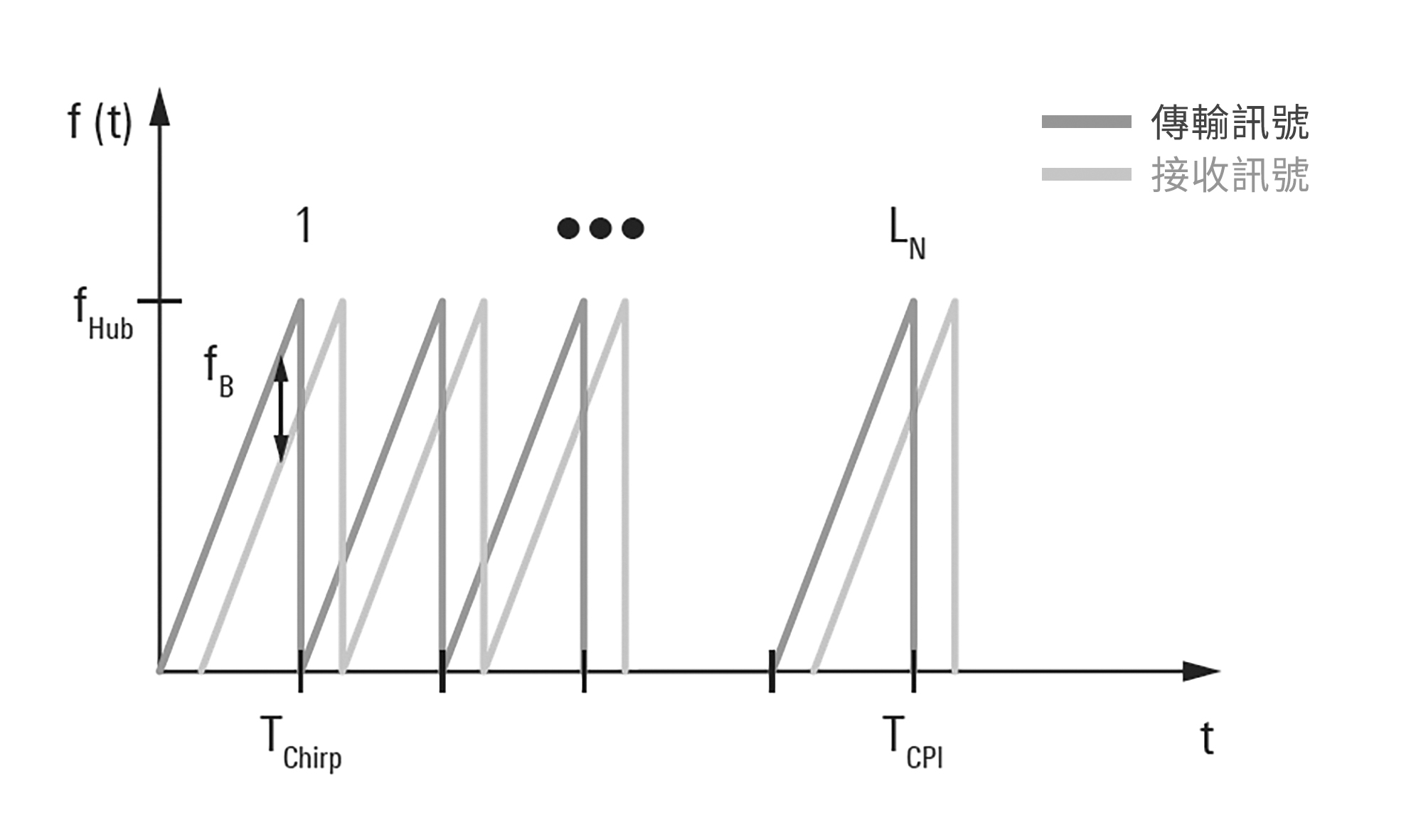 圖4 Chirp序列
圖4 Chirp序列
.fswee:指訊號頻寬,在76GHz到81GHz頻段中最多可達5GHz。
.Tchirp:為單一FMCW Chirp的長度,一般為10us至40ms範圍內。
.TCPI:為數毫秒至長達100毫秒的Chirp區塊。
雷達會同時發射與接收訊號。透過混合接收訊號與發射訊號,便可測得所謂的拍頻(Beat Frequency, fB)。每一個物體(每一個回波)都會構成一個拍頻。經過快速傅立葉轉換之後,測得的拍頻即可用於計算距離與徑向速度。
許多雷達感測器會在不同應用情境下,分別使用這些波形訊號。這些訊號會由雷達排程器根據用途及所需的明確度與解析度等因素選取後,以數種模式進行發射。
例如,在某次脈衝發射時會選擇低訊號頻寬,以提供更多的最大距離範圍,但如此會降低距離範圍的解析度。然而,為了對目標物進行解析並判讀,下一個測量循環則會使用高解析度但會減少最大確定距離的高頻寬訊號。
其他用途包括減少來自其他車用雷達感測器的干擾。此時,雷達感測器排程器將導入跳頻或波形分集(Wave Form Diversity)機制(並選擇較低IF頻寬之訊號)。如此,根據執行的演算法,車用雷達感測器必須在Tchirp或TCPI設定後進行頻率切換。
每一個訊號波形都有其獨特的特性,而電達波形與日俱進的設計與重要性可見一斑。
方位角和仰角
方位角和仰角是透過使用數個發射與接收天線測得。視天線數量而定,也可測得方位角和仰角的解析度。
為了估算角度,雷達一般會測量多個天線所接收到訊號的相位差。若使用包含至少兩個接收天線的均勻線性陣列,則可透過Δr=dsin(α)算出角度α,其中,d為以λ/2間距的天線單元之間隔距離(圖5)。
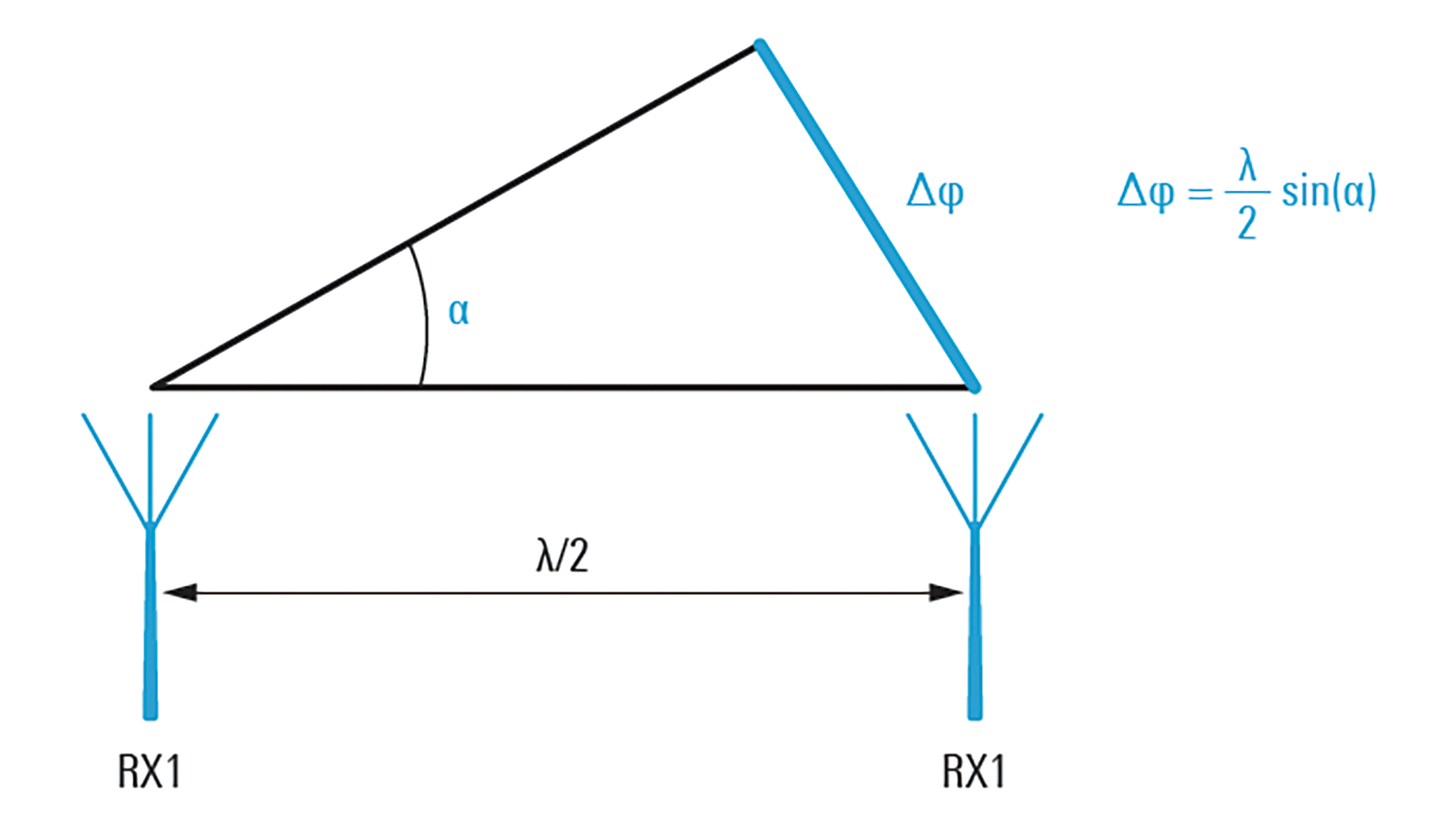 圖5 使用兩個接收天線估算角度
圖5 使用兩個接收天線估算角度
透過增加天線單元的數量可計算出方位角解析度,亦可改善角度量測的準確度。當今許多車用雷達均使用MIMO雷達訊號處理來改善角解析度。如圖6所示,為一前端為1個TX和4個λ/2間距RX的雷達。決定空間解析度的天線總數以N_TX×M_RX定義,前提是天線巳經妥善排列;圖6上圖表示1×4=4個單元,而圖6下圖表示2×2=4個單元。因此,兩個陣列都可以達到相同的解析度。測得的相位差取決於TX及RX。
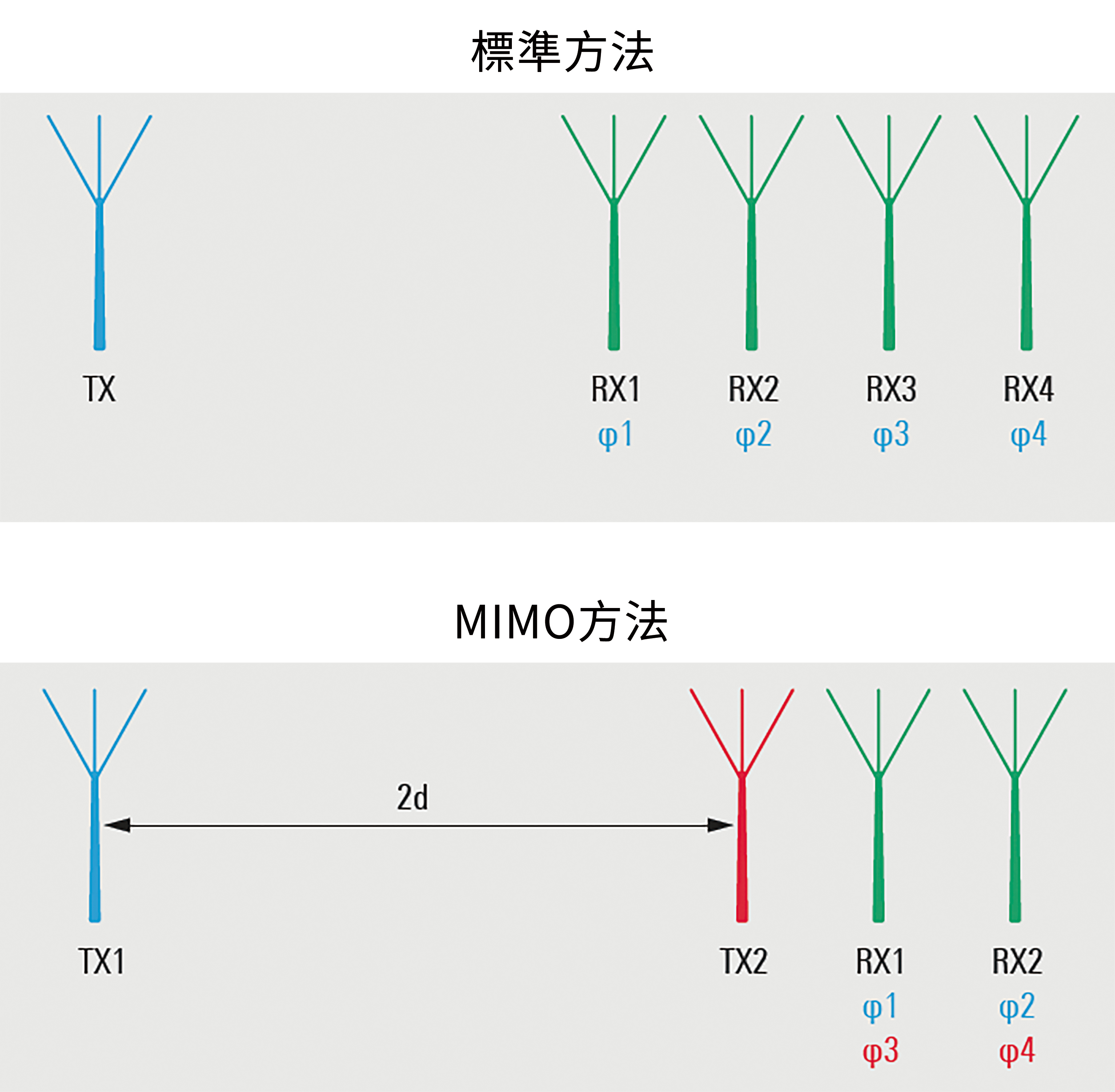 圖6 MIMO原理
圖6 MIMO原理
由於TX1和TX2不等距於接收天線陣列,因此接收的相位也不同。如果兩個發射端同時作用,則兩個接收天線將測量到四組相位[1]。
為了讓接收器區分不同的發射訊號,會使用數種不同的方法:分時多工、分頻多工、分碼多工。
在分時多工當中,每一個發射器會按順序作用(圖7)。如此一來,接收器便會根據時間點得知訊號來源。
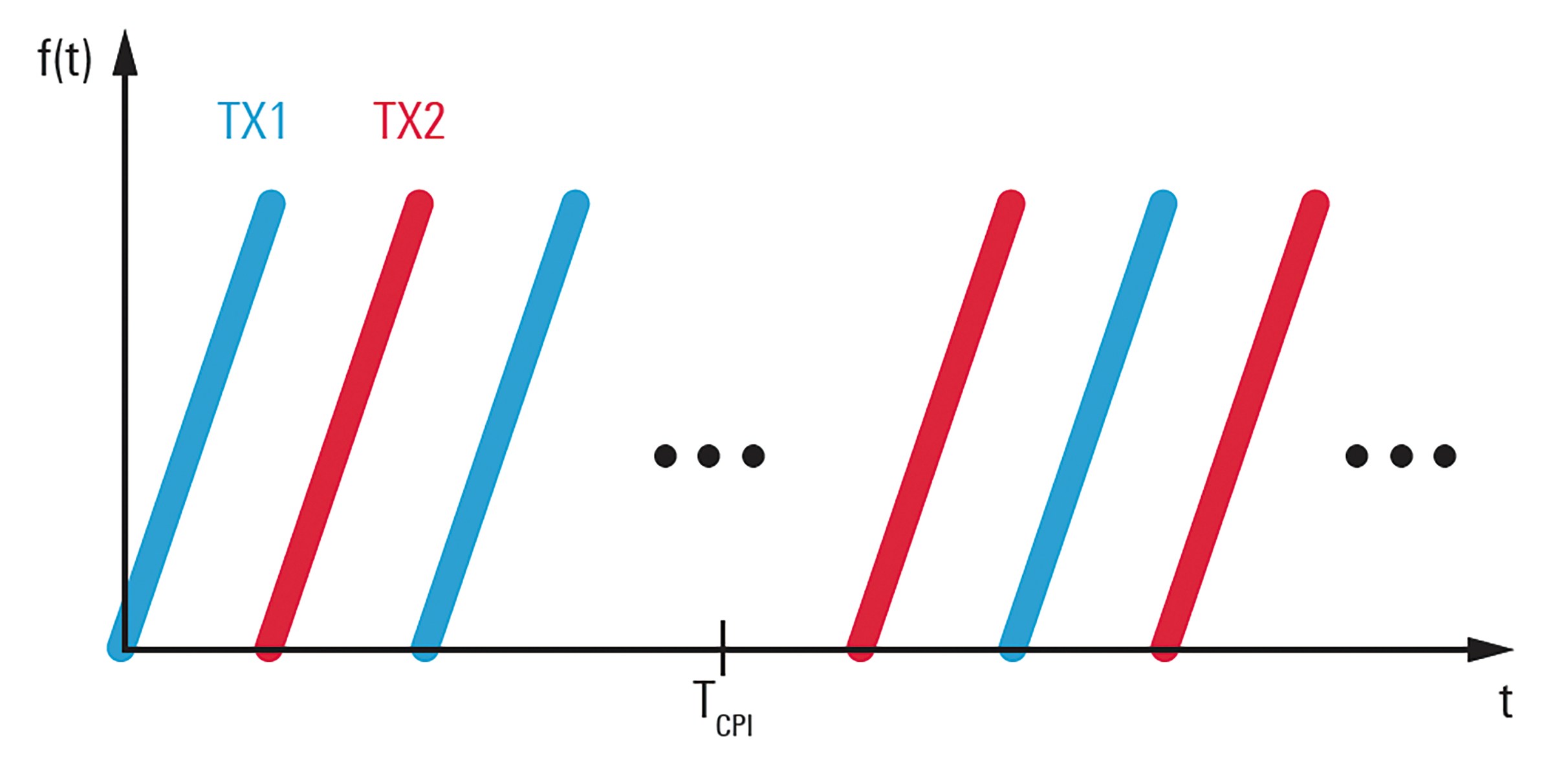 圖7 分時多工
圖7 分時多工
另一種做法則是兩個發射器同時作用(圖8)。在此情況下,接收器必須根據正交碼分辨訊號來源。舉例來說,此類正交碼可以是作為二進制相位編碼的Hadamard順序。由於是同步發射,因此理論上而言,如果做到完美隔離,可以得到10log10(N_TX)的訊噪比效益。
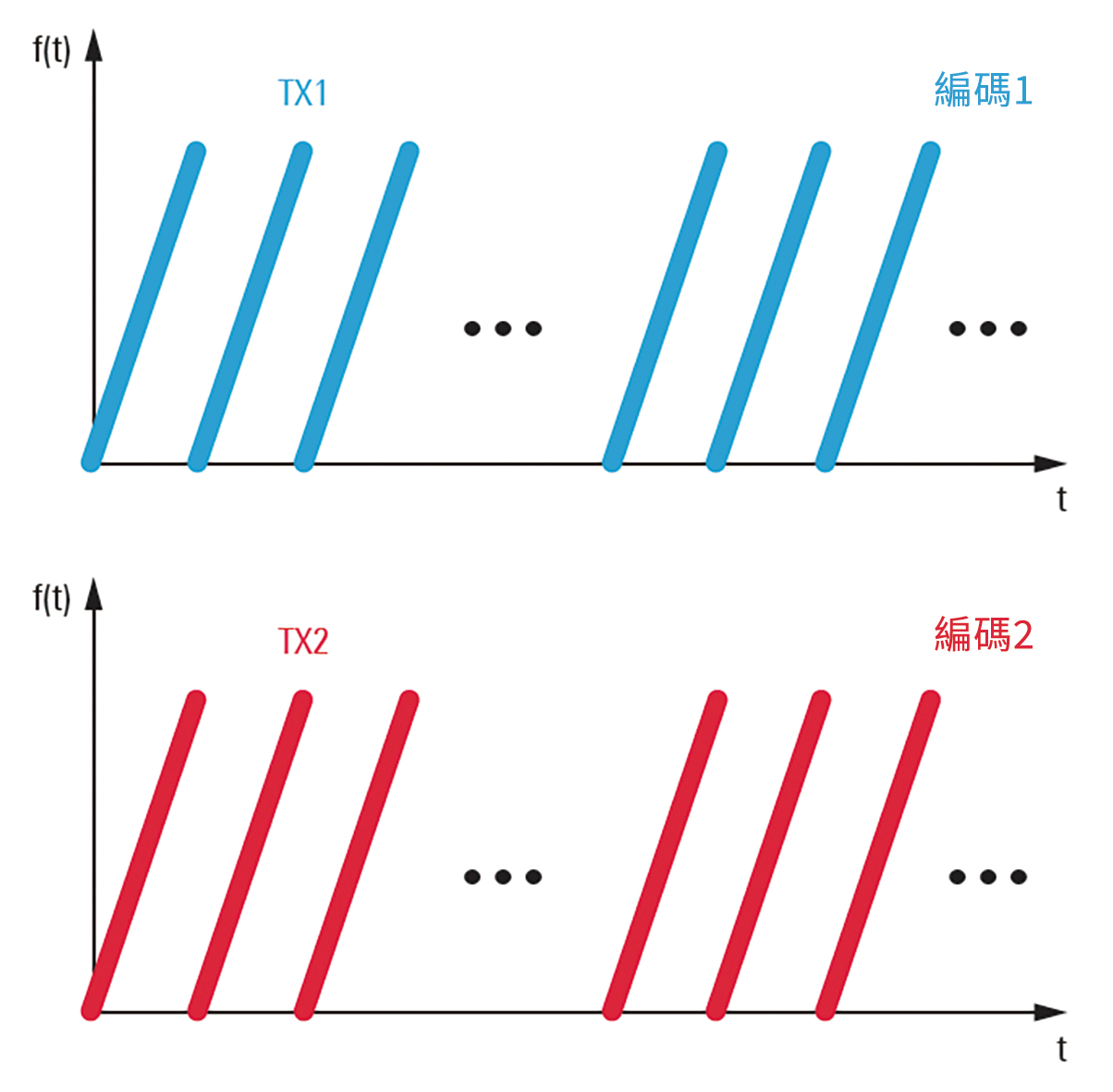 圖8 分碼多工
圖8 分碼多工
雷達解析度以及需要有訊號頻寬的原因
視雷達的用途而定,會有不同高或低的距離解析度需求。
距離解析度 ∆R=C/2B (B=訊號頻寬,c=光線速度)取決於訊號頻寬。
訊號頻寬越大,距離解析度越細,相較於較粗糙的距離解析度,其相同大小物體的散布點也會更清楚(物體更立體並可更輕易地分辦)。
圖9說明使用不同解析度測得的車輛散布點。雖然在500MHz距離解析度下無法看出車側後視鏡,但在2GHz時便可看見,並可在7GHz解析度下加以辨別。
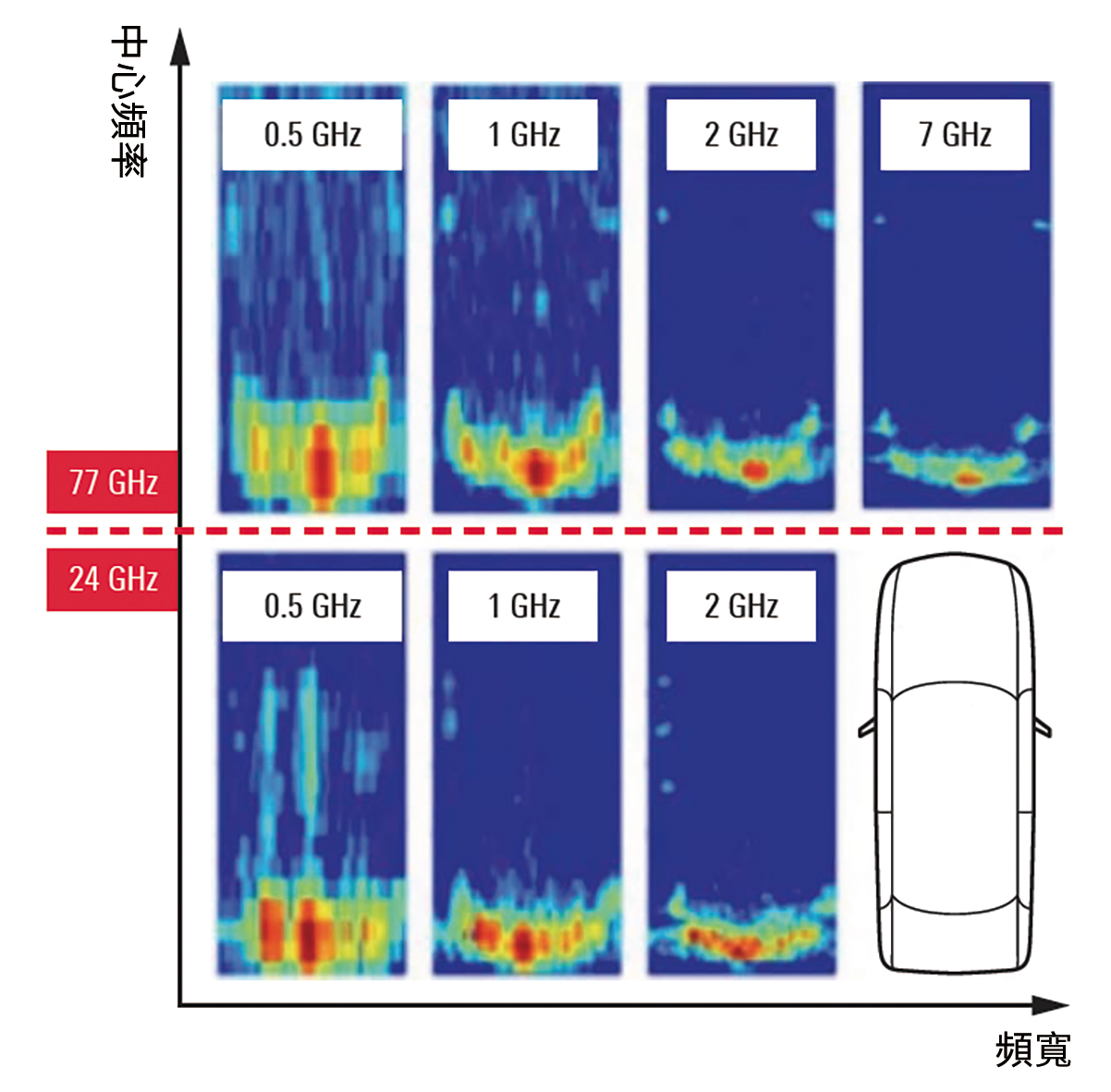 圖9 未來安全與舒適用途的頻寬需求,如Ulm大學Markus Andres的示例
圖9 未來安全與舒適用途的頻寬需求,如Ulm大學Markus Andres的示例
有業者如羅德史瓦茲(R&S)以10GHz的訊號頻寬,使用數千個發射與接收天線,進行另一個高解析度毫米波(mmWave)測量。
透過這些眾多的發射與接收天線可得出超高方位角和仰角解析度,使得雷達影像開始看起來有如圖像一般。
解析度為關鍵因素,也是主要的探討焦點。都會環境中的車用雷達必須分辨其他車輛及弱勢的道路使用者,如:行人或自行車手、電線桿、房屋、路緣、地磚鋪石等。前述的各式解析度都有助於此辨識能力。
距離解析度越精細,能偵測到的物體散布點就越多。提高距離解析度會減少最大確定距離(Maximum Unambiguous Range)。
舉例來說,如果距離解析度非常精細,將會需要高訊號頻寬:
5GHz訊號頻寬 →∆R=3公分距離解析度
若訊號頻寬偏低,則距離解析度較粗糙:
150MHz訊號頻寬 →∆R=1公尺距離解析度
徑向速度精度與為何高頻率較受青睞
在某些應用中(如:行人偵測)則需要精細的徑向速度精度。徑向速度精度的定義為,為區分兩個反射波所需的最小速度差。高(精細)徑向速度精度可偵測微都卜勒效應,並有效分辨來自地面雜波及自身運動所產生的緩慢回波。
徑向速度是根據都卜勒位移測得,因此取決於載體頻率。在相同的徑向速度下,較高的頻率會具備較高的都卜勒位移。徑向速度也取決於訊號的瞄準時間(Time-on-target),即:根據公式1所計算出的同調訊號處理間隔TCPI時間

……..公式1
公式1說明,不論是較長的TCPI或更高的載體頻率,均有助於改善徑向速度精度。
當前法規允許車用雷達使用24GHz及77GHz/79GHz頻段。根據上述公式可得知,在77GHz頻段下,都卜勒位移比在24GHz頻段下高出三倍,即在相同的同調訊號處理間隔的徑向速度精度亦提高三倍。
(本文由羅德史瓦茲提供)