為能大幅降低車禍事故的傷亡機率,全球車廠皆視行車安全問題為必要課題,因此近期所推出的車輛紛紛結合了最先進的科技,希望能於緊急狀況下提供駕駛者必要的協助。
奧迪交通事故研究小組的一項研究指出,90%以上的道路事故其原因都可歸責於人為的疏失,因此透過自動駕駛技術將可大幅減少事故發生率(這項技術類似於飛機所使用的空中自動駕駛系統)。
這聽起來似乎是科幻小說中才存在的高科技,但其實自動駕駛技術已然實現,且存在於許多豪華車種,甚至中階價位的車輛中。除了現在常見的停車輔助系統(Parking-assistance System)外,還有許多駕駛輔助技術可協助日常駕駛,例如車道變換輔助(Lane-change Assistant)、車輛盲點偵測(Blind-spot Detection)與智慧巡航控制(Adaptive Cruise Control)。其中,停車輔助系統乃基於一個非常明確可/否的引導程序,智慧巡航控制則可透過接收前方車輛訊息進行駕駛速度修正。
自動駕駛與大型城市的發展息息相關。國際能源機構指出如莫斯科、上海、東京和墨西哥等大型城市,已達兩千到三千萬人口之多,這些城市正面臨車輛暴增的問題,如今全球車輛數目已達十億之多,預估於2025年全球將高達十五億輛。其中,中國就占了四億輛之多,且集中在幾個主要的城市。
在這樣的時空背景下,自動駕駛將不只著重於道路安全和便利性的問題而已;更將在極端路況下,協助調節交通流量的暢通度。
車用雷達求精又求省
除了攝影機及超音波感測器外,汽車工業正轉向投入雷達技術的研發,以期大幅降低成本。雷達技術可以在任何天氣條件下快速且準確的測量多個物體的速度和距離,未來雷達技術將是實現自動駕駛的關鍵要素;這些頻率調變的雷達訊號皆可透過頻譜分析儀進行分析,因此雷達元件的研發人員即可透過頻譜分析儀,即時的自動偵測、量測與顯示雷達訊號。
雷達技術在汽車與軍事用途上有許多不同考量點。事實上,該技術最初乃因應軍事用途所開發;不過因為汽車產業承受巨大的成本壓力,所以必須降低元件成本;此外,車用雷達感測器通常安裝於汽車塑膠保險桿的後方,但由於其空間非常有限,因此感測器必須非常的精巧。
相較於攝影機與超音波的應用,雷達技術最大的優勢則是雷達感應器與物體間的偵測,不需要透過視覺觀測,這將大幅節省保險桿於量產的成本,亦可於車輛設計的初期導入。然而,在訊號發送與接收的衰減補償則成為一大挑戰,因為訊號將穿過保險桿上不同的材質層以及(金屬)塗料,這種衰減補償將可透過雷達感測器進行後處理。
在車用市場,汽車製造商目前可以利用24GHz及77GHz不同頻段的雷達;24GHz ISM頻段下頻寬最大可達250MHz,24GHz超寬頻(UWB)則已提供高達5GHz頻寬;然而由於國際規範的關係,這些將只能使用至2022年底為止。
77GHz與81GHz間的頻率範圍日後將開放,其頻寬達4GHz,已被使用於具前瞻性的應用上。由於訊號頻寬將決定距離解析度,這對於雷達的應用相當重要,因此頻寬僅1GHz的122GHz與244GHz頻率範圍已不在汽車產業中使用,目前僅限於研究階段並視其後續發展。
LFMCW助力 多台車輛速度量測輕鬆到位
在汽車雷達的應用中,研發人員通常希望可以在一個量測週期中,同時確定多個物體的速度與距離;然而一般的脈衝雷達無法達成這個任務。其實研發工程師可利用單一週期內傳送及接收訊號間的時間偏移,即可確定車輛間的距離;若要同時確定速度,則必須使用頻率調變訊號,例如線性頻率調變連續波(LFMCW)訊號(圖1)。
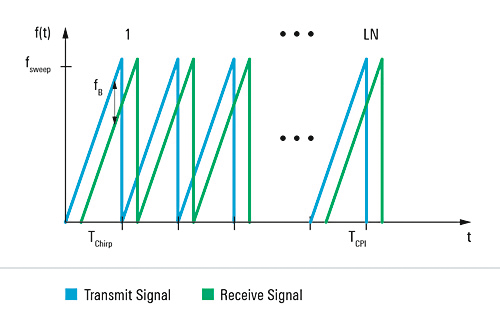 |
| 圖1 LFMCW雷達訊號的組成 |
如圖2所示,發射及接收訊號間的頻率偏移亦稱作差頻(Beat Frequency)。它包含都卜勒頻率分量(fD)及延遲分量(fT);都卜勒分量中包含了速度(Velocity)的相關訊息,延遲分量包含了距離(Range)的相關訊息。
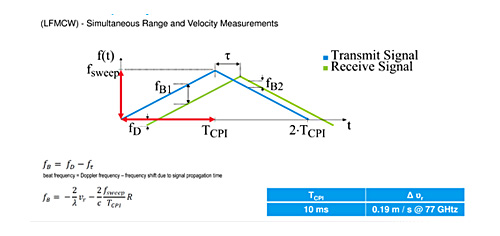 |
| 圖2 透過線性調頻序列,即可在一個量測週期中決定速度及距離。 |
圖2左下方的方程式中有兩個未知數R(距離)及Vr(速度),該方程式透過兩個差頻量測來確定所需的參數;緊接著第一個訊號之後,第二個訊號則會結合線性調頻進行量測;假如有多個目標,則無法明確地確定多個快速頻率變化(線性調頻)的差頻配對;所產生的假目標(Ghost Targets)並不真實存在。這個問題即可透過發射不同線性調頻的各種訊號來解決,但測試時間也相應增加。
透過線性調頻序列的單次量測週期來取得這兩個參數是可行的,相較於總量測週期來看,單一線性調頻非常的短,每一個差頻主要透過延遲分量來決定,以這種方式,距離即可在每一個線性調頻後直接被確定。
都卜勒頻率最初是被忽略,但是如果確定一個序列內幾個連續的線性調頻間的相移,都卜勒頻率即可透過傅立葉轉換來確定,因此可以計算出前方車輛的速度,當速度解析度提高,量測周期的長度也會增加。此外,這些複雜過程所需的雷達元件,必須具備強大處理能力的電路及訊號處理器。
杜絕LFMCW雷達感測錯誤 瞬態分析測試選配可自動偵測
LFMCW訊號雷達感測器的開發工程師正面臨一個重大挑戰。從發送訊號的理想形狀上,任何偏差都可能引起速度及距離的錯誤判斷,特別是在安全相關的應用面上,這將可能造成災難性的後果。例如,線性調頻的頻率線性度、線性調頻序列的長度及可重複性等重要參數,都必須進行驗證(圖3)。
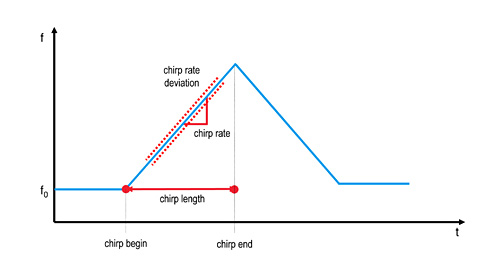 |
| 圖3 LFMCW訊號參數 |
頻率及寬頻瞬變的訊號,可透過時域訊號分析技術的瞬態分析來進行特性測試。以市面上可見的FSW頻譜分析儀來說,其瞬態分析測試選配支援線性調頻序列的自動偵測及分析;線性調頻率、線性調頻長度及線性調頻率偏差等重要參數,皆會顯示在測試結果表格中,且毋須透過標記(Marker),大幅節省人工分析時間(圖4)。
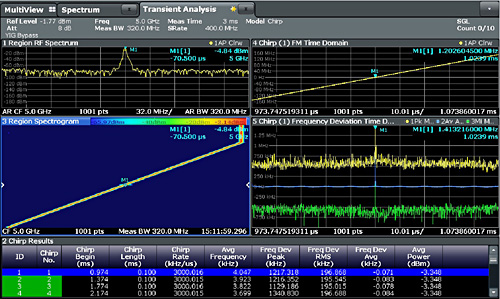 |
| 圖4 FSW頻譜圖模式可顯示FM線性度。 |
以I/Q為基礎的資料分析為這個測試方法的核心,根據頻率、量測頻寬及記錄時間即可確定分析的範圍,並以圖形格式顯示測試結果,使分析過程更有效率且更清楚。
分析範圍的大小取決於須要量測線性調頻訊號的數量,線性調頻率偏差相對於理想的線性調頻,都會呈現於測試結果表格中。若選擇了較大的量測頻寬,則最大的量測時間就會縮短;此外,可透過時間視窗(Timing Window)的設定,以忽略量測過程中所發生的瞬變;理想的線性調頻通常是透過平均線性調頻率和功率量測來確定。
雷達訊號分析時,I/Q資料將會被非同步的記錄及評估,特別是大頻寬將使分析的時間顯著的縮短。測試結果可以透過各種方法來顯示,例如射頻(RF)頻譜、調幅、調頻和調相,亦可同時顯示量測畫面。頻譜分析儀可完整顯示記憶的內容及使用者定義的間隔或個別的線性調頻。
顯示頻譜變動/時間關係 線性度提升訊號分析準確度
線性度是線性調頻訊號的重要參數。因為它會影響目標參數的量測準確度,特別是在頻譜圖模式下可以被顯示出來,將描繪出訊號的頻譜變動與時間的關係,隨著頻率(X軸)與時間(Y軸),訊號強度將透過顏色編碼呈現。這是訊號行為一個很好的描述,且允許透過時間進行評估,即使是有短暫非理想的訊號,當這種訊號出現時,透過附加功能即可進一步分析。
RF頻譜圖可提供在選定的時間下,將所有量測訊號的全部頻譜透過圖像來呈現(圖5),可顯示的不僅是所需的訊號,還包括非理想的頻譜;使用時域頻率偏移圖,即可分別顯示完整調頻訊號的頻率錯誤與解調;對於小振幅的非理想訊號處理,可利用視訊濾波器或平均加權多重線性調頻訊號,以減少雜訊影響。
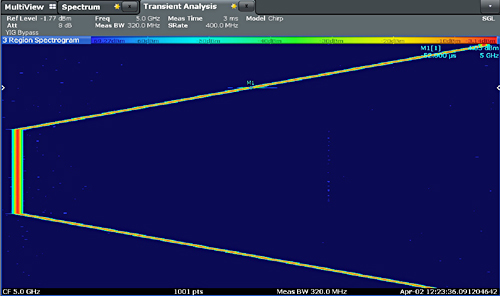 |
| 圖5 FSW頻譜分析儀的測試表格中顯示了重要的線性調頻參數,例如線性調頻率、線性調頻長度以及線性調頻偏差率,省去透過標記的人工分析時間。 |
雷達感應器的開發過程中,另一個重要的參數為來自於理想線性調頻長度的偏差,因為這會影響速度量測的準確度。為此,量測的結果包括線性調頻起始時間及長度皆會於表格中呈現,所有線性調頻皆會落在先前定義的結果範圍內,每個獨立的線性調頻訊號皆可透過時間標記來識別;此外,在測試結果表格中,線性調頻訊號會按編號順序排列,使它們更容易被區分。
這裡所提到的測試都可以透過頻率達67GHz的頻譜分析儀來執行,且毋須搭配額外的配件。當雷達訊號量測頻率需求超過67GHz的情況下,則須透過諧波混頻器(Harmonic Mixers)將輸入分析儀的訊號轉換成中頻(IF)。
因此分析儀將儘可能的使用較高的中頻,這樣將可提供寬廣且明確的頻率範圍;這一點對於寬頻序號分析來說尤其重要,例如LFMCW訊號。
這樣的測試技術對於未來的駕駛科技發展將產生影響,雷達技術將持續扮演關鍵角色。隨著技術的進步與安全性的提升,訊號將日益複雜,對於頻寬及解析度的需求也將更高,特別是在交叉路口,更必須確保感應器能清楚的分辨正確訊號,則須在訊號上進行編碼。
 |
| 圖6 C2C通訊應用示意圖 |
隨著自動駕駛日益普及,車對車(C2C)通訊也將不可或缺(圖6)。C2C通訊乃基於WLAN 802.11p標準發展而來,未來的車輛以及道路的基礎設施將可彼此溝通,舉例來說,系統會提醒駕駛路徑上的施工地點,交通號誌將會傳遞交管訊號給過往的車輛,讓駕駛輔助系統將這些訊息直接列入考慮。
(本文作者任職於羅德史瓦茲汽車市場業務發展部門)