自動駕駛車將改變汽車市場的格局,不只顛覆各種傳統產業生產鏈,也將激化人工智慧產業的高度成長,其核心技術從車聯網(Connected Vehicle)技術的突破,演進至高度自動輔助駕駛,最終到自動駕駛汽車(Autonomous Vehicle)之境界。
自動駕駛車將改變汽車市場的格局,不只顛覆各種傳統產業生產鏈,也將激化人工智慧產業的高度成長,其核心技術從車聯網(Connected Vehicle)技術的突破,演進至高度自動輔助駕駛,最終到自動駕駛汽車(Autonomous Vehicle)之境界。
從自動駕駛產業來看,波士頓顧問集團(BCG)指出,2025年前自動駕駛車市場產值估計將達420億美元,到2035年,自動駕駛車就占全球汽車銷量的四分之一。而根據CB Insights研究指出,隨著自動駕駛的熱潮持續延燒,除了傳統汽車大廠投入研發外,矽谷為主的蘋果(Apple)、Google、Tesla、甚至優步(Uber)也正在發起研發自動駕駛的戰爭,全球有超過30家公司投入自動駕駛研發的行列。
 圖1 SAE自動駕駛等級
圖1 SAE自動駕駛等級
為了達到自動駕駛車的技術進階過程,車聯網通訊技術快速升溫,車聯網服務融合資訊、通訊、汽車電子、及數位內容科技等多重應用,滿足行車環境之各項需求,如舒適/便捷、效率/潔淨、安全/安心等之智慧化服務,亦為駕駛人提供預先警告可能發生的危險狀況,讓駕駛人提早採取因應措施,避免交通意外發生。
本文將以自動駕駛結合車聯網之應用為出發點,針對歐美發展近況、技術與應用發展,以及標準制定介紹,同時輔以國內目前自動駕駛與車聯網整合應用之研發進行說明。
自動駕駛趨勢儼然成形 美國/歐盟明訂法規積極布局
美國汽車工程師學會(Society of Automotive Engineers, SAE)於2014年定義自動駕駛等級定義,從Level 0無自動功能至Level 5完全自動駕駛,如圖1所示。
・Level 1駕駛支援
透過駕駛環境對方向盤和加減速中的一項操作提供駕駛支援,其他的駕駛動作都由駕駛員進行操作。
・Level 2部分自動化
透過駕駛環境對方向盤和加減速中的多項操作提供駕駛支援,其他的駕駛動作都由駕駛者進行操作。
・Level 3有條件自動化
由自動駕駛系統完成所有的駕駛操作。根據系統要求,駕駛者提供適時的應答。
・Level 4高度自動駕駛
由自動駕駛系統完成所有的駕駛操作。根據系統要求,駕駛者不一定須要對所有的系統請求做出應答、限定道路和環境條件等。
・Level 5完全自動駕駛
在所有駕駛者可應付的道路和環境條件下,均可以由自動駕駛系統自主完成所有的駕駛操作。
美國交通部2016年9月20日針對自動駕駛汽車所發布首項聯邦指導方針,其採用SAE分級標準,繼2018年10月4日發布Automated Vehicle 3.0後,於2020年1月8日發布Automated Vehicle 4.0政策原則。自2011年起,美國已有29個州政府與華盛頓特區等相繼通過自動駕駛車輛上路之法規,包括阿拉巴馬州、阿肯色州、加州、科羅拉多州、康乃狄克州、佛羅里達州、喬治亞州、伊利諾州、印第安納州、肯塔基州、路易斯安那州、緬因州、密西根州、密西西比州、內布拉斯加州、紐約州、內華達州、北卡羅萊納州、北達科他州、奧勒岡州、賓夕法尼亞州、南卡羅萊納州、田納西州、德州、猶他州、維吉尼亞州、佛蒙特州、華盛頓州,以及威斯康辛州,如圖2所示。
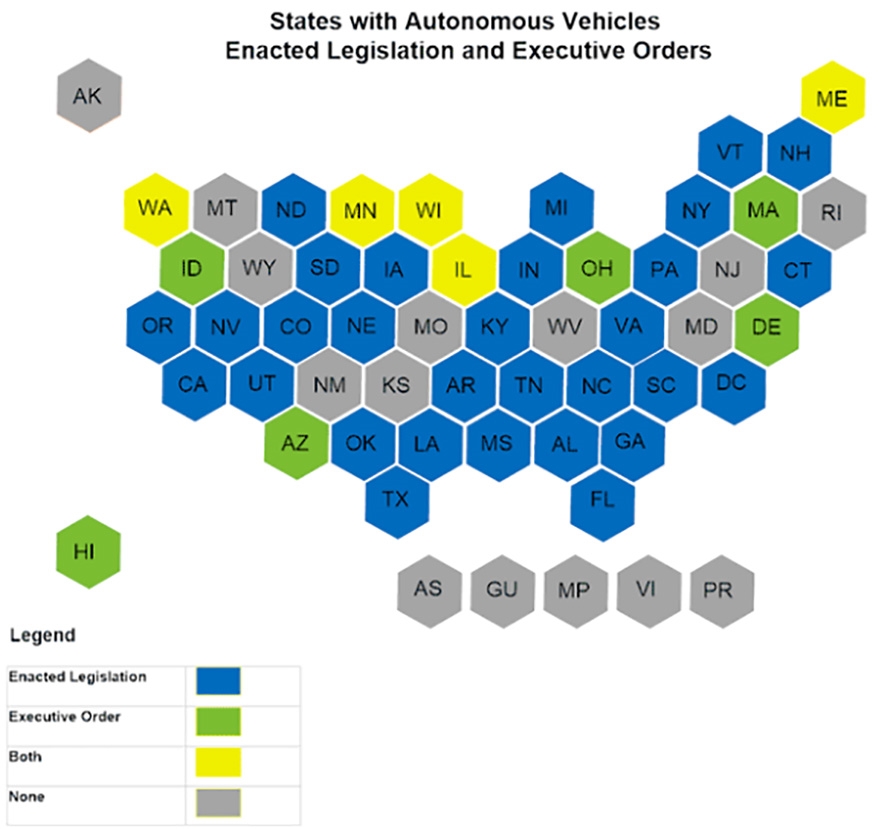 圖2 美國各州自駕法規狀態
圖2 美國各州自駕法規狀態
2016年12月13日美國交通部發布法規制定通知(Notice of Proposed Rulemaking, NPRM),擬立法強制新小型車輛具備V2V(Vehicle-to-Vehicle)通訊技術。美國交通部亦於2015年至2020年進行WAVE 1與WAVE 2兩階段之CVPD(Connected Vehicles Pilot Deployment)試煉場域建置計畫,計畫補助城市包括紐約市(New York City)、佛州坦帕(Tampa)以及懷俄明州(Wyoming),依據計畫成果網站,紐約市已於市府所屬之公務車安裝車對車通訊技術,並已購置4,000台車載裝置,運行於Midtown與Manhattan間,並搭配汽車對基礎設施(Vehicle-to-Infrastructure, V2I)技術升級交通號誌系統,同時已部署330台路側設備,系統架構如圖3所示;佛州坦帕則運用聯網車輛技術解決坦帕市中心尖峰時刻之壅塞問題,並保障行人安全;而懷俄明州運用車對車通訊技術與汽車對基礎設施(V2I)技術,取得I-80東西向公路的交通流量,並將資訊散播予未安裝此技術的車輛。
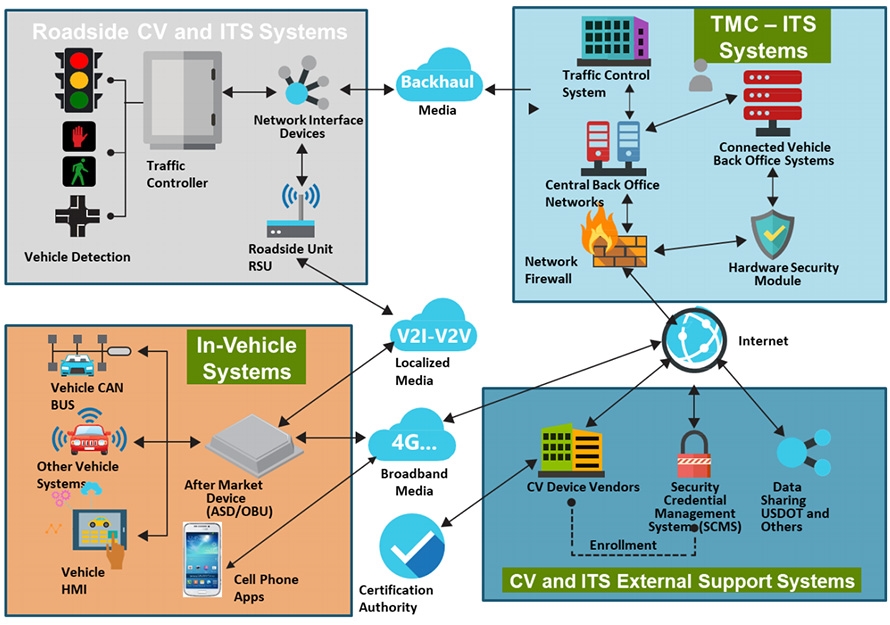 圖3 紐約市CVPD系統架構
圖3 紐約市CVPD系統架構
美國聯邦通信委員會(Federal Communications Commission, FCC)於2020年2月6日發布NPRM,此法規制定通知主要研擬5.9GHz頻段位置較低的45MHz(即5.850~5.895GHz)為非授權頻段,另接近上緣之30MHz(即5.895~5.925GHz)保留於運輸與車輛安全,其中20MHz(即5.905~5.925GHz)專用於C-V2X,其餘10MHz則考量配置於C-V2X或保留於DSRC,意見徵詢於2020年3月9日截止。
歐盟政府於2016年11月30日在比利時布魯塞爾宣布C-ITS Strategy正式啟動,此策略為歐盟正式邁向CCAM(Cooperative, Connected and Automated Mobility)的初始里程碑,歐盟CCAM發展藍圖如圖4所示,此舉主要為歐盟道路車輛能彼此並與交通基礎設施通訊,運用ETSI(European Telecommunications Standards Institute)ITS G5與Cellular通訊技術,並結合C-ROADS與C-ITS Platform成果。歐盟政府亦於2018年5月17日宣布歐盟Automated Mobility策略,主要目標為2020年歐盟道路車輛具備特定自駕系統(SAE Level 3/4),如高速公路自動駕駛(L3/4)、卡車自動跟隨系統(L2-3-4),以及市區接駁自駕車(L4),並預計2022年前所有車輛皆具備聯網能力。
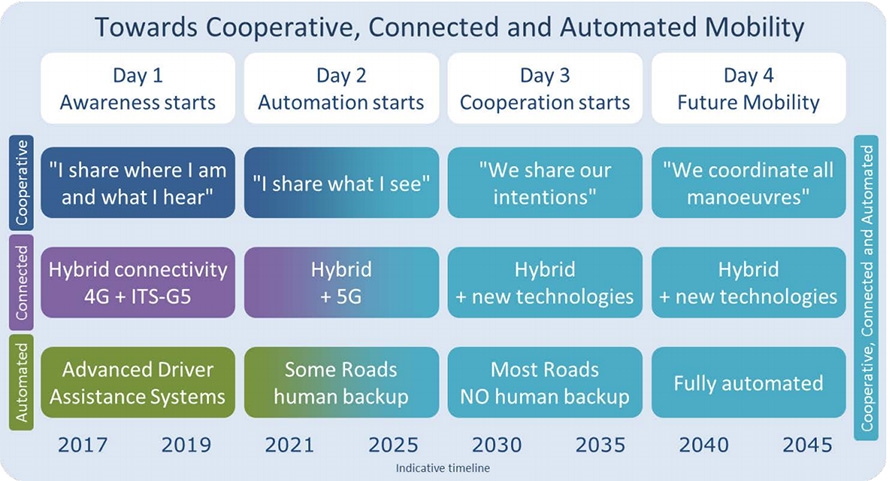 圖4 歐盟CCAM發展藍圖
圖4 歐盟CCAM發展藍圖
車間通訊應用在即頻段分配大勢底定
美國聯邦通訊委員會於1999年決定將5.9GHz(5.850~5.925GHz)頻段分配予汽車通訊使用。圖5為美國5.9GHz DSRC之頻段規畫,其以10MHz頻寬為單位,將75MHz頻寬劃分成7個頻道,頻道178為控制頻道(Control Channel, CCH),其餘6個頻道為服務頻道(Service Channel, SCH),其包含2個公共安全專用服務頻道(頻道172為車與車間公共安全專用服務頻道,頻道184為交叉路口公共安全專用服務頻道),2個中距離公共安全/私用共享服務頻道(頻道174與176),以及2個短距離公共安全/私用共享服務頻道(頻道180與182)。
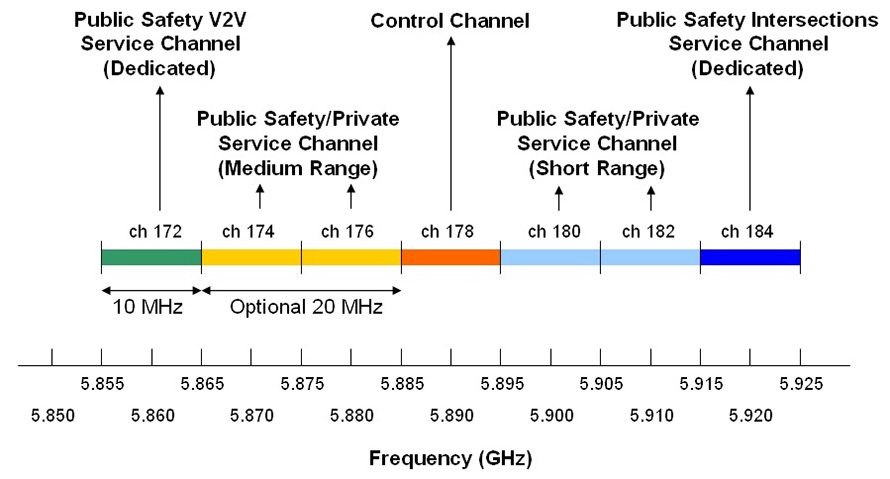 圖5 美國5.9GHz DSRC頻段規畫
圖5 美國5.9GHz DSRC頻段規畫
資料來源:IEEE 802.11 WAVE SG
美國材料試驗學會(American Society for Testing and Materials, ASTM)於2002年批准採納5.9GHz為規格制定頻段的DSRC標準E2213-02,並於2003年將新版標準E2213-03送交FCC,經同意後成為北美地區DSRC標準。此外,ASTM亦將該標準推往電機電子工程師協會(Institute of Electrical and Electronics Engineers, IEEE)以促成IEEE 802.11p標準的誕生,而此標準已於2012年整合至IEEE 802.11標準中。
美國交通部所規範的V2X應用可參考圖6,WAVE/DSRC具備低傳輸延遲(0.002秒)、高傳輸距離(1,000公尺)與高傳輸速度(27Mbps)等特性,符合上述行車環境安全性應用的需求,可使用於提供安全與非安全性之行車服務應用。前文所述FCC於2020年2月6日所發布NPRM,其研擬5.9GHz頻段接近上緣之30MHz保留於運輸與車輛安全,其中20MHz(即5.905~5.925GHz)專用於C-V2X,其餘10MHz則考量配置於C-V2X或保留於DSRC,此舉可視為美國5.9GHz頻譜的重要變革。
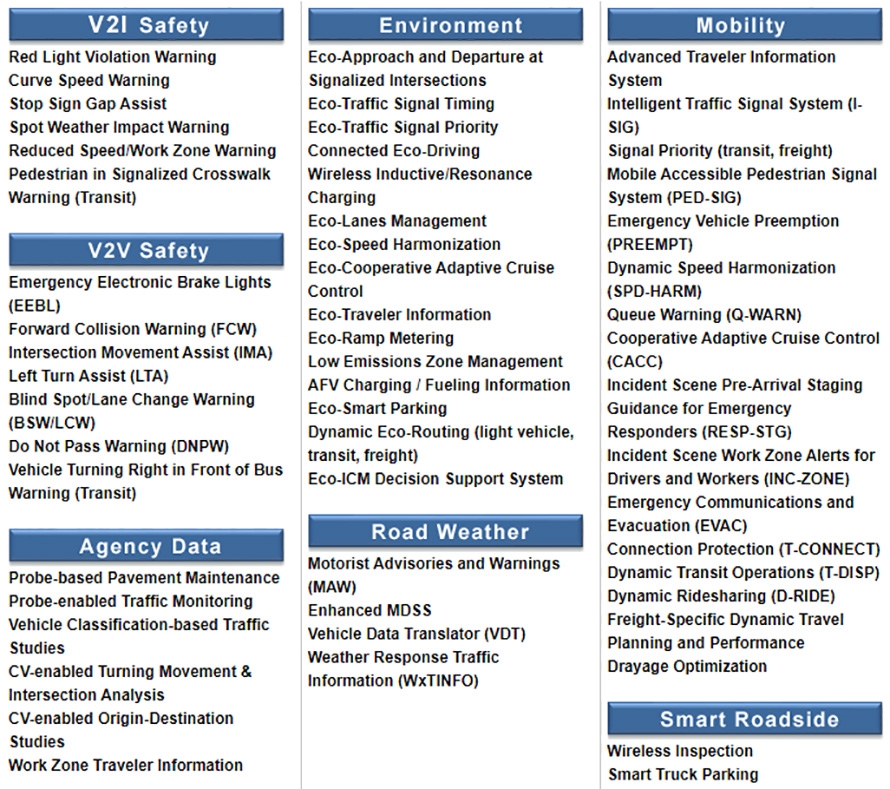 圖6 V2X應用
圖6 V2X應用
資料來源:http://www.its.dot.gov/pilots/cv_pilot_apps.htm
制定車間通訊標準IEEE/ETSI/ISO不缺席
以下說明國際車間通訊標準的制定趨勢,分別說明IEEE 1609標準制定趨勢、ETSI TC ITS標準制定趨勢以及ISO TC 204標準制定趨勢。
IEEE 1609標準制定趨勢
美規車間通訊技術底層採用IEEE 802.11p標準,而上層則採用IEEE 1609系列標準。圖7為IEEE 1609標準架構圖,對應至開放系統互連參考模型(OSI Reference Model),IEEE 802.11p標準制定實體層(PHY Layer)與資料鏈結層中的媒介存取控制層(Medium Access Control, MAC)的通訊協定,而媒介存取控制層中的多頻道運作(Multi-Channel Operation)至應用層之通訊協定,則由IEEE 1609各個子標準所規範制定,各個子標準介紹如下:
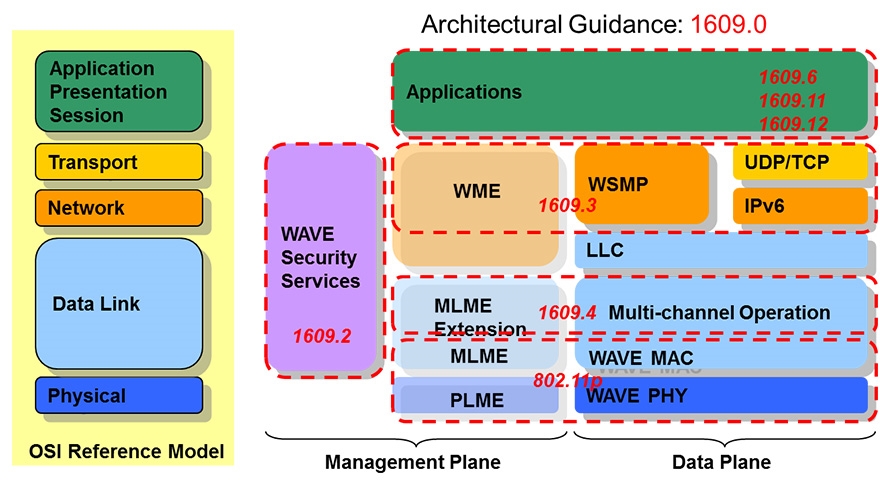 圖7 IEEE 1609標準架構
圖7 IEEE 1609標準架構
・IEEE 1609.0(Architecture)
描述整個WAVE/DSRC(Wireless Access in Vehicular Environments /Dedicated Short Range Communication)的架構與提供多通道(Multi-channel)WAVE/DSRC裝置於移動車載環境下必要的服務。
・IEEE 1609.2(Security Services)
定義WAVE裝置使用之安全訊息封包格式及其處理程序,包含WAVE管理訊息與應用訊息之安全保護方式與管理功能,以提供核心安全性功能。另外,包含安全憑證管理系統與憑證管理相關功能。
・IEEE 1609.3(Networking Services)
提供OSI(Open Systems Interconnection)模型中網路層(Network Layer)與傳輸層(Transport Layer)之服務予WAVE裝置與系統。其定義WAVE裝置管理與資料服務,並建立一套WSMP(WAVE Short Message Protocol),即WAVE短訊協定。同時,IEEE 1609.3可向後相容傳統網際網路常用的通訊協定,如IP(Internet Protocol)、UDP(User Datagram Protocol)及TCP(Transmission Control Protocol)等現行網路服務常用的通訊協定。於2015年底版本改為歐美整合版本,將可支援ISO與ETSI車載通訊標準功能。
・IEEE 1609.4(Multi-channel Operation)
描述多通道無線電運作、WAVE模式、媒體存取控制(MAC)及實體層,包含控制通道與服務通道區間時間的運作、優先存取的參數、通道切換的規範及管理服務。
・IEEE 1609.6(Remote Management Services)
歸類於應用層,提供可相互操作服務以管理WAVE裝置。其主要描述一遠端管理服務,包含WAVE裝置的識別服務,並採用IEEE 1609.3標準定義之WAVE管理服務及WSMP識別服務。
・IEEE 1609.11(Over-the-Air Electronic Payment Exchange Protocol for Intelligent Transport Systems)
具體描述付款(Payment)與身分確認(Identity Authentication)所需之電子付款服務層及配置(Profile),並描述WAVE/DSRC應用之付款傳送機制。其定義使用WAVE之電子付款設備,例如OBU(Onboard Unit)與RSU(Roadside Unit),基本技術互通,但未提供完整的互通方案。須注意的是,IEEE 1609.11並未完整定義電子付款服務之應用層協定,其主要功能為定義介接ISO組織所訂立之電子付款應用層標準與IEEE 1609.3之功能介面與必要資訊轉換處理。
・IEEE 1609.12(Identifier Allocations)
描述IEEE 1609系列標準中所使用的提供服務識別值定義(Provider Service Identifier, PSID)。其列出現行WAVE系統中ID分配的規則,以及目前已分配使用的ID值。
IEEE 802.11p雖已成熟,但由於IEEE 802.11 PHY和MAC在802.11p修訂後已發展多項成熟技術,例如低密度奇偶檢查碼(Low-Density Parity-Check, LDPC)、空時分組碼(Space-Time Block Coding, STBC)等技術,因此對於更高流通量與可靠性的V2X應用而言,則需採用最新的802.11技術,是故IEEE NGV SG於2018年3月成立,旨在增強V2X技術並維持與802.11p的向後兼容性,並於2018年12月正式成立IEEE 802.11bd任務組,以開發下一代V2X技術的標準修訂版,IEEE P802.11bd NGV設備模式如圖8所示。
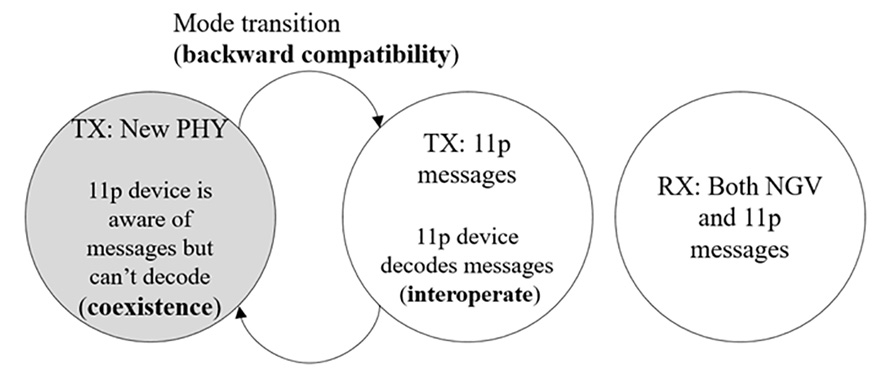 圖8 IEEE P802.11bd NGV設備模式
圖8 IEEE P802.11bd NGV設備模式
ETSI TC ITS標準制定趨勢
歐洲電信標準組織(European Telecommunications Standard Institute, ETSI)為EC(European Commission)官方認可的歐洲標準發展組織,ETSI TC ITS以發展智慧型運輸架構相關標準為主要目的,其標準制定架構如圖9所示,ETSI TC ITS由5個WG組成,各個WG簡述如下:
・WG1(Application Requirements and Services)
規範ITS中基礎應用的需求與服務,並制定Applications與Facilities兩層之通訊協定。
・WG2(Architecture and Cross Layer)
發展適合所有ITS的通訊架構與跨層管理協定,並扮演歐洲ITS通訊架構的協調者角色。
・WG3(Transport and Network)
規範Networking和Transport兩層之協定,並利用車載網路特有的地理位置資訊特性,發展制定GeoNetworking和IPv6相關協定。
・WG4(Media and Medium related)
規範MAC和PHY兩層相關的標準,其將歐洲ITS使用之頻譜劃分為ITS-G5A、ITS-G5B與ITS-G5C三個部分,並兼顧其中的相容性。
・WG5 (Security)
制定ITS相關的安全性議題,筆者曾任WG5副主席職務,協助規劃與推動ETSI ITS通訊安全標準制定方向,負責TR 102 893 TVRA安全標準制定,此草案為車載安全通訊標準制定的基準,規範車載環境中威脅、弱點與風險分析,該草案已於2017年3月正式出版,並推動惡意行為偵測(Misbehavior Detection)新工作項目TR 103 460成立,並為此草案之負責人,主要規範車間通訊惡意行為偵測架構與回報機制,以提升車間通訊安全性。
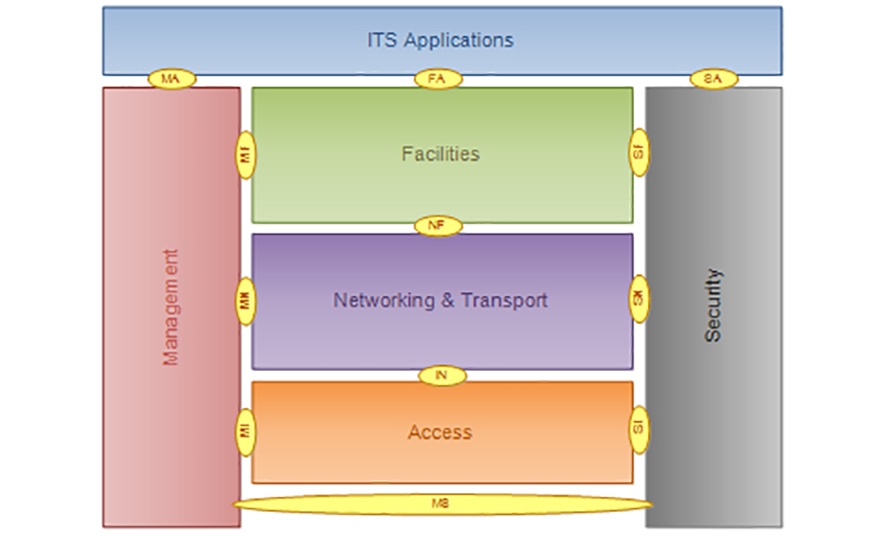 圖9 ETSI TC ITS標準制定架構
圖9 ETSI TC ITS標準制定架構
資料來源:ETSI EN 302 665
目前ETSI目前正著手制定第二版標準,涵蓋使用案例(Use Cases)包括TR 103 298自動跟車(Platooning)、TR 103 299協同式可適應性巡航控制(Cooperative Adaptive Cruise Control, C-ACC)、TS 103 561行動協調服務(Maneuver Coordination Service)、TR 103 562集體感知服務(Collective Perception Service),以及TR 103 300-1/2/3弱勢道路使用者(Vulnerable Road Users, VRU)等。
ISO TC 204標準制定趨勢
ISO(International Organization for Standardization)是由世界各國國家標準制定機構代表與工商業廠商所成立的國際標準組織制定機構,目前共有164個國家會員,其中由121個Full Members,39個Correspondent Members,以及4個Subscriber Members組成。ITS相關的TC 204於1992年成立,負責路運中有關資訊、通訊與控制的標準制定,並涵蓋ITS的相關應用,如旅行資訊、交通管理、大眾運輸、商業運輸、緊急服務與商業服務等,目前ISO TC 204 WG14標準組織已開始進行自動駕駛相關標準制定,包括ISO 23374 自動代客停車系統(Automated Valet Parking Systems)、ISO 22737低速自動駕駛車輛(Low-Speed Automated Driving(LSAD) Systems for Limited Operational Design Domains),以及ISO 14272卡車跟隨系統(Truck Platooning Systems)等。筆者於擔任ETSI TC ITS WG5副主席期間,成功加入ISO 22737低速自動駕駛車輛草案撰擬專家群,並成功將我方自駕車團隊於台中水湳智慧城自駕接駁試運行案例納入LSAD草案,有效提升我國在ISO標準組織的曝光度。
國內自駕結合車聯網iRoadSafe取得初步成果
在經濟部技術處支持下,工研院已研發國內首套滿足自動駕駛需求之環周感知次系統(Surrounding Sensing Subsystem, S3),整合光達、雷達、攝影機、衛星定位、慣性導航、V2X等感測與通訊元件,具備深度學習影像辨識、三維(3D)光達感測、多重感知融合、即時事件推理、即時建圖與定位、感知次系統驗證等關鍵核心技術,並針對台灣與亞洲特殊道路環境進行設計(如複雜號誌路口、汽機車混流、大雨),S3運作情形如圖10所示。
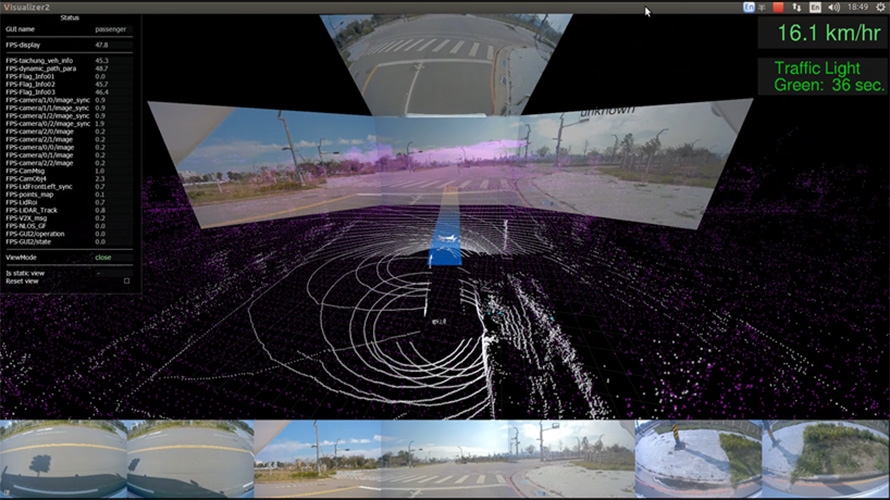 圖10 工研院自駕感知次系統運作實況
圖10 工研院自駕感知次系統運作實況
工研院亦與國內車電廠車王電子、電動巴士廠華德動能、車輛整合運動控制系統新創公司iAuto先期合作,研發ITRI ADV(Autonomous Driving Vehicle)自動駕駛電動中型巴士,除搭載自主研發之S3感知次系統,亦可於特定場域提供自動接駁能力。
相對於國外自駕小巴系統,ITRI ADV可乘載17人,並具備開放號誌路口通行與雨天、夜間行駛能力,搭配台中世界花卉博覽會,於水湳智慧城場域作試運行並開放民眾搭乘體驗,運行期間為2018年12月21日至2019年1月20日,展示自動定速巡航、自動車道維持、自動緊急煞車、自動定點停靠、自動號誌停等,以及自動迴轉道迴車等自駕能力,累積共計1,525體驗人次、185趟次,行駛里程536.5公里。
台中水湳智慧城自駕接駁試運行亦結合iRoadSafe智慧道路安全警示系統,如圖11~12所示,透過提供路口號誌時相與非視線危險人車訊息,使自駕車具備開放路口通行能力,展示自動號誌停等、號誌優先服務、自動緊急煞車結合機車路徑預測(圖13)、路口盲點偵測(圖14)等能力。
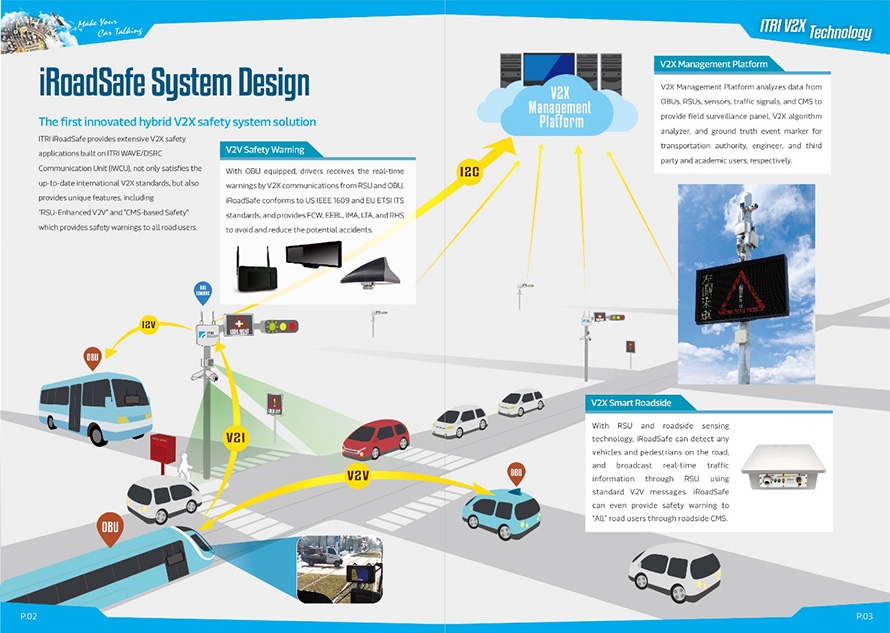 圖11 工研院iRoadSafe智慧道路安全警示系統架構
圖11 工研院iRoadSafe智慧道路安全警示系統架構
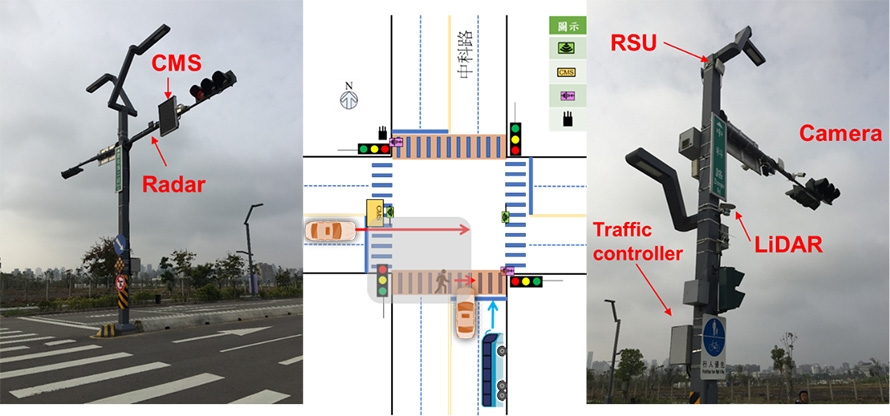 圖12 台中水湳智慧城智慧路側系統建置
圖12 台中水湳智慧城智慧路側系統建置
iRoadSafe為國際首套V2X系統解決方案,不但符合V2V應用趨勢,更創新結合路側通訊、路側感測與路側看板,克服V2V裝機普及率問題,提供所有用路人車V2V完整安全警示能力,自2016年起,已於全台9個城市(基隆市、台北市、新北市、新竹市、新竹縣、台中市、南投縣、台南市、高雄市)共計26處建置示範場域,如圖15所示。此套系統亦於2019年榮獲國際愛迪生銀牌獎與ITS World Congress亞太區產業成就獎之殊榮。
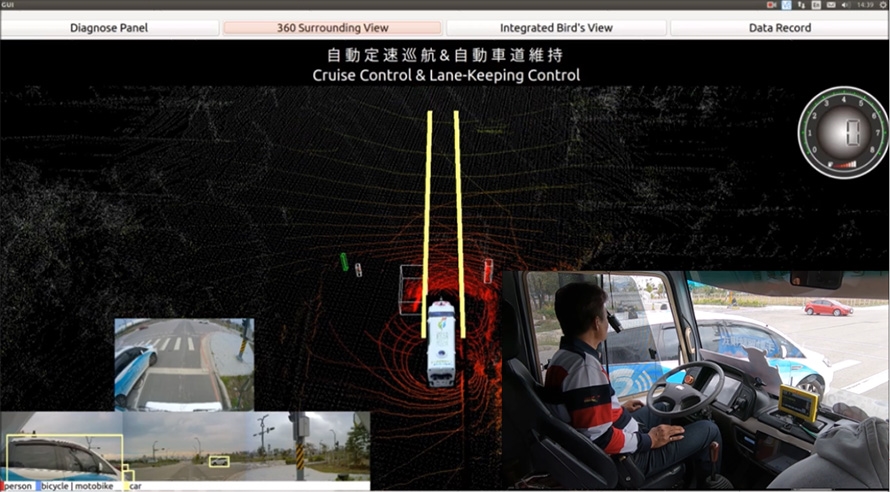 圖14 台中水湳智慧城路口盲點偵測功能展示
圖14 台中水湳智慧城路口盲點偵測功能展示
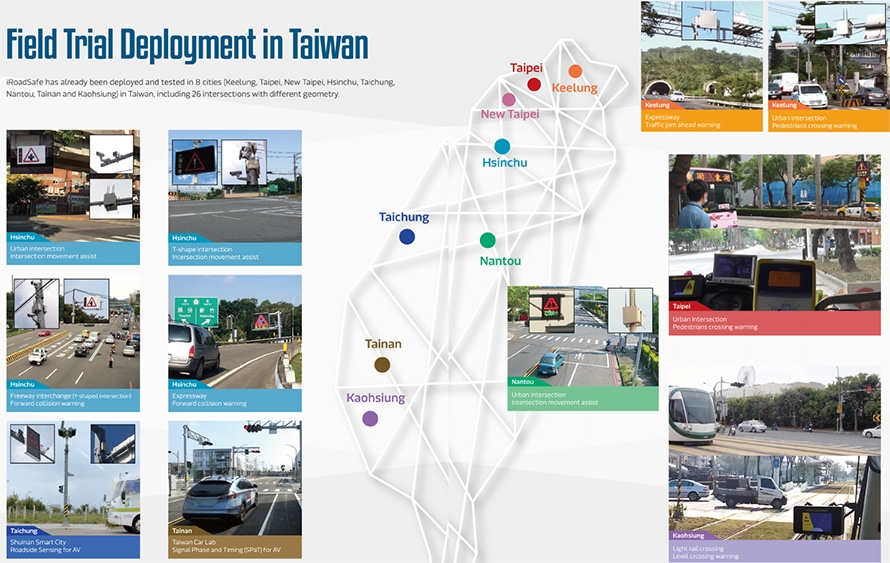 圖15 工研院iRoadSafe智慧道路安全警示系統場域建置
圖15 工研院iRoadSafe智慧道路安全警示系統場域建置
工研院於2019年推出新款自動駕駛電動中型巴士,除X-by-Wire由類比控制提升為數位控制外,亦強化定速巡航控制(Cruise Control, CC)、自動緊急煞車等功能,並進一步新增適應性巡航控制(Adaptive Cruise Control, ACC)與車道變換控制(Lane Change Control, LCC)等自駕功能。
此外,工研院與艾歐圖科技、台灣大學、明志科技大學、台塑汽車貨運股份有限公司於2019年共同參與「2018-2019杜拜全球自駕運輸挑戰賽」,此競賽為受全球矚目的無人自動駕駛車競賽盛事,共六十多隊報名參加四個類組的比賽,並自全球27個新創競爭隊伍中脫穎而出,於2019年6月28日台塑南亞場域進行決賽,展示自動定速巡航、自動車道維持(Lane-Keeping Control, LKC)、自動迴轉道迴車(Automatic U-Turn)以及自動號誌停等(Signal Phase & Timing, SPaT),並整合iRoadSafe車聯網技術,與台塑貨車共同展示適應性巡航自動跟車能力,榮獲新創組第二名佳績。
無人載具科技創新實驗條例過關 國內自動駕駛發展終有依循
因應無人載具科技興起的國際發展趨勢,政府為鼓勵國內產業投入無人載具創新應用,擬具「無人載具科技創新實驗條例」,此條例主要參考金融科技發展與創新實驗條例之監理沙盒精神,賦予產學研各界於實際場域進行無人載具科技、服務及營運模式之創新實驗時,能夠於特定範圍及條件下,透過法律暫行排除相關監理規範之適用,並已於2018年11月30日經立法院三讀通過,同年12月19日經總統公布,經行政院核定自2019年6月1日施行,期透過立法建構無人載具科技友善、安全、創新發展的環境,經濟部亦同步推動「無人載具科技創新實驗計畫」,並已於2019年10月25日開始受理申請,以營造合理安全的創新測試場域,促進相關產業技術及服務應用發展,奠定我國智慧交通運輸厚實基礎。
針對國內產業標準推動方面,台灣資通產業標準協會於2016年11月10日正式成立車聯網與自動駕駛委員會,此委員會主要為針對次世代智慧交通以及車聯網所帶動的V2X與自動駕駛發展,制定與國際接軌的產業共通標準,強化產業上下游之整合,以提升我國產業競爭力,筆者亦曾擔任其中車聯網通訊技術工作組組長職務,此工作組將持續導入國際V2X通訊標準作為國內車聯網通訊產業標準制定之依據。
確保自動駕駛安全同時兼顧使用者體驗
自動駕駛結合車聯網通訊技術的發展,使得自駕車與用路人、車、路與環境之終端設備、服務設施、路側設備等將透過異質網路無縫整合,有效提供自駕車提前掌握前方路況來車與行人,以驅動自駕巴士進行決策控制,將分散的資訊得以融合,促使用車人與車輛及周遭環境之互動,未來多重感測與路側資訊如何快速整合,同時兼顧自駕安全及使用者體驗,將成為下世代自動駕駛技術發展之關鍵挑戰。
<本文由台灣資通產業標準協會提供,作者為工研院資通所車載資通訊與控制系統組車載資通訊系統設計與驗證部副經理>