在很多新車設計中,液壓助力轉向正逐漸被電動助力轉向(EPS)所取代。因此,在客運車輛市場中大都使用電動馬達驅動轉向架,燃油經濟性稍有改善。由於無須處理液壓油,因此EPS還能夠讓車輛報廢時更加環保。它還繼續採用電腦控制的線控驅動系統,最初是防鎖死煞車系統(ABS)和循跡控制(Traction Control),現在正朝著完全自動駕駛的方向發展。
儘管早期EPS設計的經驗不佳,批評它們缺乏「感覺」,但是隨著感測器(Sensor)和控制技術的改進,人們逐步克服這種顧慮,普遍接受了對電動助力轉向系統的改進。現在,對於大多數汽車駕駛員來說,如果駕駛員確實意識到或者能分辨出區別,那麼EPS的性能與液壓輔助一樣好。
就小型公路車輛而言,這是很好的,但對於大型商用車輛(例如公共汽車和卡車)而言,這是另外一回事。對於非公路用車(ORV)而言,挑戰可能更加苛刻;例如在採礦和採石業、農業、工廠和倉庫中使用的那些車輛。問題是提供轉向助力所需的轉矩更高,同時還要確保車輛的可靠性,即比普通客運車輛的里程更高、負載更重、使用更頻繁。
此外,一些商用車輛或工業車輛可能比普通公路車輛更快採用自動駕駛或半自動駕駛技術,這使EPS成為一個必備條件。長途貨運就是這樣一種早期的備選方案;但是發生變革的領域是工廠和倉庫,在該領域,堆高機正在被完全由電腦控制的無人駕駛車輛所取代。
對於EPS的採用,商用車輛使用壽命的可靠性至關重要,它必須更耐用,從而避免故障或任何與安全有關的事故。一輛普通客運車輛在其整個生命週期中可行駛16萬公里,而一些商用車輛預計在3年內行駛超過40萬公里。此外,商用車輛的操作環境更容易產生噪音和振動,這對EPS系統必須提供的性能和可靠性提出更高的要求。
提升現有感測器性能 搶進商用車輛EPS市場
商用車輛和非公路用車輛產生的轉向負載越重,需要的動力輔助越高。安裝EPS裝置的轉向柱通常會產生大約5千牛頓(kN)的力。將EPS更靠近方向盤以驅動小齒輪軸或轉向架可能會將此力增加到5千牛頓至12千牛頓,但這樣EPS的溫度和振動都會升高。大型車輛可能需要更大的力,至少15千牛頓,對於最苛刻的越野車輛而言可能會更高。這種車輛的EPS系統將須要透過較高的電壓(例如42伏特)進行操作,並且能夠提供大於3千瓦(kW)的輸出功率。
設計EPS系統少不了感測方向盤角度位置以及施加到轉向柱、小齒輪或齒條的轉矩的感測器。車輛速度是EPS的電子控制單元(ECU)所執行的演算法在驅動EPS電機時須要考慮的另一個因素,因為在較高速度下只需較小的力量即可實現同樣的方向改變(圖1)。
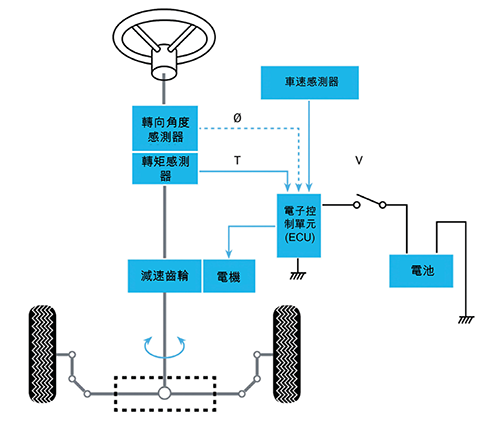 |
| 圖1 電動助力轉向(EPS)系統的典型示意圖 |
如上所述,採用滑動式電觸點的旋轉轉矩和位置感測器容易由於振動而引發問題,商用車輛的情況會更糟。作為轉向柱安裝的EPS系統的一部分,它們還會導致客艙噪音,對於客運車輛而言,其噪音要低於40分貝(dB)。比較好的解決方案是使用基於磁感應原理的非接觸式位置和轉矩感測器,並將其安裝於轉向架上。這有利於系統不受振動的影響,從而降低噪音,提高可靠性。
建議再進一步使用TT Electronics Magnetorque Plus轉向感測器,該感測器是專門為基於機架的EPS系統設計,並且可以訂製,以適合較大的軸,如卡車、公共汽車和越野車的軸。這種創新的感測器已經過嚴格的測試,可滿足商用車輛具有的振動挑戰,並且已證明在每個軸持續時間高達8小時的情況下,可承受x軸和z軸上8.5G的加速力,y軸上5G的加速力。該感測器提供+/-5度的轉矩解析度,從而電子控制單元能夠實現極其平穩地輸出。旋轉角度也可以訂製,對於一輛小汽車,2.5圈通常就足夠,但對於商用車輛,最多可能需要4圈。
非接觸式位置/轉矩感測 霍爾效應提供最佳解法
使用霍爾效應(Hall Effect)技術不僅可以實現非接觸式位置和轉矩的感測,而且還能夠感測磁場對載流導體的影響,並且在該導體上產生橫向於電流的電壓差。霍爾效應感測器以積體電路IC的形式實現。在該電路中,可以採用晶片輸出電壓的形式測量磁力對半導體中電荷載流子的影響。
因此,可透過適當排列霍爾感測器和磁鐵,利用由旋轉元件和靜止元件(即轉子和定子)構成的組件來測量軸的角位置和旋轉。對於EPS應用,該組件可以安裝於轉向柱、小齒輪軸或轉向架上。Magnetorque Plus感測器專為機架安裝的EPS設計,將非接觸式轉矩和多圈位置感測組合到一個堅固的裝置內,非常適合滿足大型車輛更苛刻、更嚴格的要求。
圖2顯示該感測器的總體結構,圖3則提供了轉子元件更詳細的說明。冠狀環在位置轉子組件中一起旋轉,而被設計成增加可用磁通量的磁體和軛在轉矩轉子組件(而非位置轉子組件)中一起旋轉。
用於位置感測的霍爾感測器,位於圖2中可以看到的兩個小齒輪上方之定子組件的電路板上。它們感測小齒輪上磁體的磁通量。透過這些訊號,微處理器計算出三個輸出,其中兩個輸出提供高解析度的角位置訊號,第三個輸出是一個計算圈數的訊號,它提供±900度以上絕對的多圈位置資訊。
對於轉矩感測,圖3所示的冠狀環從轉矩轉子的環形磁體中擷取磁通量,同時利用集中器將磁通量引導到位於其他定子電路板上的霍爾感測器(圖2)。轉矩轉子位於轉向軸上,並且與感測器組件中的其他任何元件無機械接觸。集中器是靜止的,因此磁通量的流動是從磁體到第一個冠狀環和集中器,然後通過霍爾感測器到第二個集中器和冠狀環,最後返回到磁體。
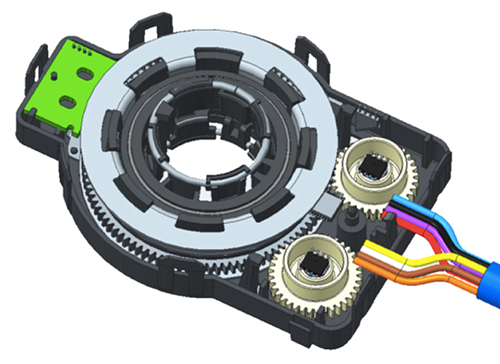 |
| 圖2 Magnetorque Plus感測器內部 |
為增加穿過集中器的磁通量,布置了兩個冠狀環,第一個冠狀環位於磁體的北極,第二個冠狀環位於磁體的南極。之後,如果磁體旋轉,使得兩個集中器手指位於北極和南極之間連線的中心,那麼流過霍爾晶片的磁通量將為零。在任何中間位置,流經霍爾感測器的磁通量將與轉矩轉子組件和位置轉子組件之間的相對旋轉角度成正比,這提供了對施加到方向盤的轉矩的測量。
實現耐久可靠操作 EPS切入重型/工業車輛
在客運車輛上採用電動助力轉向的進展迅速,但在重型商用車和工業車輛上採用的速度較慢。對於此類應用,特別是工業越野類型的車輛對EPS系統形成了特別的挑戰,EPS系統不僅須要在惡劣的環境中實現可靠、長壽命的操作,而且還必須提供精確、靈敏的控制。
Magnetorque Plus將位置和轉矩感測器組合在一起實現了這一切。其真正的非接觸式設計可最大限度地提高機械耐久性,確保最小壽命為100萬次軸轉動而不會降低輸出訊號。
與使用兩個獨立感測器的替代方案相比,這樣的整合方法更小、更輕、更具成本效益,而完全校準的解決方案簡化了EPS系統設計的路線,可滿足大型車輛更嚴格和更苛刻的要求。
 |
| 圖3 轉子組件的元件 |
(本文作者為TT Electronics感測和控制產品線總監)