在進行手機與全球衛星定位系統(GPS)接收功能整合設計時,除須考量行動通訊網路的訊號對GPS接收機所造成的外頻干擾,並做出妥善因應之外,同頻干擾與系統本身的干擾也是設計時不可忽視的重點。因此本文將繼續討論上述兩大類干擾的成因,並提出因應對策。
多管齊下方可根治同頻干擾
同頻干擾源主要有連續波干擾(Continuous Wave Interference, CWI)、調變隨機干擾(Modulated Random Interference, MRI)、寬頻雜訊三大類,其成因各自不同,對應的解決方法也不一樣。
連續波干擾主要是由其他無線子系統的參考頻率源(如19.2MHz的第八十二次諧波為1,574.4MHz)、壓電控制振盪器(Voltage Controlled Oscillator, VCO)、控制時脈的高次諧波落在GPS頻段所產生。在所有同頻干擾源中,CWI被視為是對GPS系統性能影響最大的干擾源。
要減輕CWI對GPS性能的影響,可透過系統端的干擾源分析或晶片端的數位訊號處理(DSP)的技術來進行。依照相關機制實作在接收機的前端或後端,CWI干擾抑制可分為前相關(Pre-correlation)和後相關(Post-correlation)法。前相關法主要是利用硬體,例如類比數位轉換器(ADC)和自動增益控制(AGC)迴路來偵測並減輕CWI的影響,後相關法則是利用演算法來偵測CWI並減輕對GPS整體性能的影響。
MRI訊號則為具有調變屬性的CWI訊號,如調頻(FM)、調幅(AM)廣播。MRI訊號會散布在頻譜上,因此相較於CWI,其對GPS整體性能的影響較低。MRI和CWI有可能影響自動增益控制迴路對增益的控制,使衛星訊號低於雜訊層,造成C/N0值的降低。
寬頻雜訊則主要是由手機功率放大器(PA)的外頻洩漏(Out-of-band Leakage)所造成。寬頻雜訊只能藉由增加天線隔離或訊號遮蔽來根治,訊號處理方面技術如增加處理增益只能減輕系統寬頻雜訊的影響。利用下列公式可計算因為PA的外頻洩漏所導致的GPS接收機雜訊指數的增加量。

其中
 :手機PA的外頻洩漏所導致的雜訊指數的增加量,單位為dB。
:手機PA的外頻洩漏所導致的雜訊指數的增加量,單位為dB。
 :手機PA在GPS頻段所產生的洩漏量,單位為dBm/Hz。
:手機PA在GPS頻段所產生的洩漏量,單位為dBm/Hz。
 :GPS天線和手機天線的隔離,單位為dB。
:GPS天線和手機天線的隔離,單位為dB。
 :室溫時的雜訊層,一般為-174dBm/Hz。
:室溫時的雜訊層,一般為-174dBm/Hz。
 :GPS接收機的雜訊指數,一般介於2.5到4dB之間。
:GPS接收機的雜訊指數,一般介於2.5到4dB之間。
提升ADC位元數可顯著增加SNR
在同頻干擾源中,除了寬頻雜訊無法利用數位訊號處理的技術來抑制,只能透過增加天線的隔離來減輕雜訊功率之外,CWI和MRI皆可透過數位訊號處理的技術來偵測和減輕對GPS整體性能的影響。
在大多數的GPS接收機中,類比數位的轉換會發生在中頻階段,也就是類比數位轉換器是直接對中頻訊號進行取樣。也有少數解決方案是將訊號直接轉換至類比基頻之後在對基頻訊號進行取樣(如高通的gpsOne解決方案)。數年前大多數低價的GPS接收機只配置1位元的ADC,目前的GPS接收機大多採用2位元ADC(Sign和Magnitude位元),下一世代的GPS接收機則傾向於採用高位元ADC(3位元或5位元)。
1位元ADC不須要用到AGC來控制輸入訊號的增益,但是會有較大的量化雜訊(Quantization Noise)。根據計算,1位元ADC會造成訊噪比(Signal-to-noise Ratio, SNR)降低1.96dB( )。2位元ADC對SNR的降低為0.55dB。
)。2位元ADC對SNR的降低為0.55dB。
1位元ADC最大的缺點在於當有強干擾訊號存在時,會因為捕捉效應(Capture Effect)的關係導致1位元ADC對干擾訊號異常的敏感。當ADC的位元數達到2以上時,就必須使用AGC迴路來控制加在訊號的增益,確保訊號的電壓位準不會超過ADC的動態範圍(Dynamic Range)。為了要充分利用多位元量化的優勢,AGC迴路必須確保ADC輸入端的訊號位準達到ADC的動態範圍。增加ADC的位元數可以增加ADC操作的動態範圍使得CWI的訊號較不會造成ADC的飽和。
善用數位AGC可協助偵測RFI
由於GPS訊號一直到相關運算之前都是埋在熱雜訊層之下,而接收機內建的AGC提供了一個精確的雜訊層量測的指標,因此只要妥善利用射頻晶片內的AGC,也可以將其用作偵測射頻干擾(RFI)的工具,因為任何型式的RFI皆會影響到原始的雜訊層的功率進而影響到AGC的設定點。
AGC主要是由一個AGC放大器(AGC Amplifier)、增益控制單元(Gain Control Unit)和回授路徑(Feedback Path)所組成。AGC放大器一般是位於中頻/基頻類比帶通/基頻濾波器之後ADC之前,增益調整單元是位於ADC之後(有些解決方案的增益調整單元是放置在DSP內),利用回授路徑來連結AGC放大器和增益控制單元。依照回授路徑上增益控制的方式AGC可以區分為類比式AGC和數位式AGC。類比式AGC的增益控制是藉由類比訊號來控制而數位式的AGC的增益控制是藉由數位訊號的方式來控制。圖1為數位控制AGC的功能區塊圖。
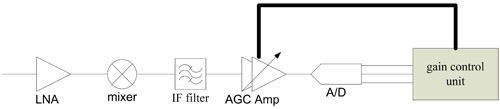 |
| 圖1 數位控制AGC的功能區塊圖 |
AGC放大器是由一個固定增益的放大器和數位衰減器(Digital Attenuator)所組成。數位增益控制單元是由功率偵測器(Power Detector)、功率平均單元(Power Averaging Unit)、數位比較器、AGC增益級(AGC Gain Stage)和誤差積分器(Error Integrator)。來自ADC的數位中頻訊號首先進入AGC增益控制單元的功率偵測器,功率偵測器一般都是由整流器所組成。功率偵測器會決定在該ADC取樣點的瞬時功率值,並將此瞬時功率值傳送至功率平均單元來決定N個取樣點的平均功率。功率平均單元主要是將N個取樣點的瞬時功率值累加之後再取其平均值。功率平均單元除了提供濾波的功能之外,N值也設定了AGC的啟動和恢復時間(Attack and Recovery Time)。數位比較器有兩個輸入埠,一個輸入埠會連接到功率平均單元的輸出,另一個輸入埠則是連接到AGC的設定點,此設定點也同時決定了進入ADC之前類比訊號的均方根的振幅(Root Mean Square Amplitude)。在沒有RFI的情況之下,AGC的設定點會設在熱雜訊的訊號功率位準上面。數位比較器的誤差會被AGC增益級適當的放大之後在進入誤差積分器,誤差積分器的輸出值則是用來調校AGC放大器內的數位衰減器。誤差積分器提供了記憶和數位增益控制輸出的平坦化。圖2為數位增益控制的功能區塊圖。
 |
| 圖2 數位增益控制單元的功能區塊 |
J/N Meter可輕易判別寬頻雜訊與CWI
利用干擾/雜訊比量表(J/N Meter)可偵測同頻RFI,其作法為利用數位增益控制單元。假設AGC放大器內的數位衰減器的Ns值為(數位值),當存在RFI時Ns值會變為NRFI。利用適當的轉換公式和校正便可以從Ns和NRFI的值計算出干擾雜訊的比(J/N)。
當J/N Meter偵測到同頻的RFI時,必須先判斷出RFI的屬性。不同的RFI對GPS接收機所產生的負面效應是不同的。在訊號進入追蹤和擷取階段也就是在IF或基頻的最後一級時J/N Meter必須能夠準確的偵測出是否存在CWI,因為CWI對衛星訊號的擷取和追蹤會有極為顯著的影響。
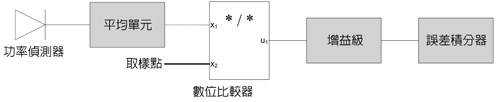
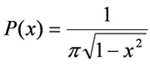
中頻雜訊振幅的統計分布可以用來判斷RFI的屬性。寬頻雜訊振幅的統計分布實際上會和有限頻寬白雜訊(Band Limited White Noise, BLMN)相似。沒有CWI的情況之下,中頻雜訊的零穿越(Zero-crossing)主要是受到熱雜訊和埋在熱雜訊層之下的GPS訊號所主導。BLMN的零穿越統計特性基本上和熱雜訊很類似,但是CWI的零穿越統計特性卻完全不同。當有同頻的CWI存在時,中頻訊號的零穿越的統計特性會受到CWI所主導,因此可以利用中頻訊號零穿越的統計特性來鑑別RFI是屬於BLMN或CWI。連續波的機率密度公式如下所示:
其中
x:介於之間的隨機變數(Random Variable),也可以被視為是正規化的正弦波峰對峰(Peak-to-peak)的振幅。圖3為機率密度公式的分布圖。
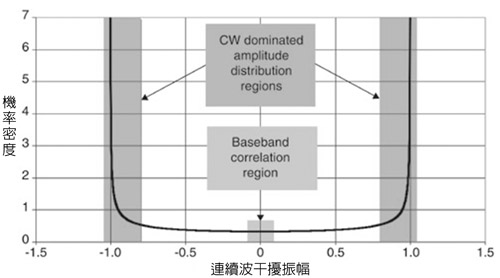 |
| 圖3 連續波的機率密度分布圖 |
從圖3中可以發現連續波訊號的大部分時間都是落在峰值振幅的附近,只有極少數的時間是落在零穿越附近。另一方面,BLMN加上GPS訊號的機率密度分布會呈現高斯分布(Gaussian Distribution),意味著在大多數的時間BLMN加上GPS訊號的振幅都是落在零穿越附近。假設A代表GPS衛星訊號、B代表BLMN訊號。A與B的頻寬在中頻濾波之後會相當的接近,量子化之後的輸出波形中會有一部分是取決於A,這是因為在這些地方因為B訊號接近零穿越,造成A的絕對值較B來的大而正確顯示出A的極性(圖4)。
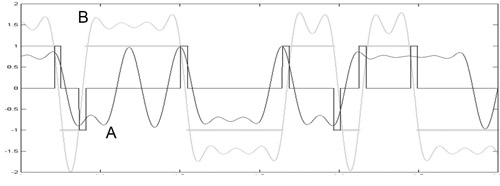 |
| 圖4 BLMN和GPS訊號經過量子化之後較小訊號的極性仍可以被保留 |
由圖4可以發現,只有一小部分波形真實反應原始A訊號的極性,其餘則成亂數型雜訊。就分碼多重存取(CDMA)系統來說,它可以累積收集這些小部分來偵測辨識出A訊號,而真實反應原始A訊號。隨著B訊號的變大導致A訊號累積的訊號判斷值也跟著縮小而增加鑑別上的錯誤率,這也就是越大的BLMN會造成越低的鑑別率。當存在強功率的CWI時,會導致CWI加上熱雜訊加上GPS訊號的合成訊號(Composite Signal)的訊號振幅的機率密度分布更往峰值的地方靠攏降低在零穿越附近的時間,降低訊號的鑑別率。
圖5為CWI加上熱雜訊再加上GPS訊號所構成的合成訊號的時域波形圖。從圖中可看出熱雜訊的隨機訊號會疊加在CWI的正弦波訊號上面,CWI功率越高,則隨機雜訊越不明顯。由於GPS訊號遠低於熱雜訊層,因此在圖5中並不明顯。越高的CWI會使得合成訊號振幅的機率密度更往峰值靠攏,進一步壓縮落在基頻解相關運算區(也就是零穿越區)的機率。
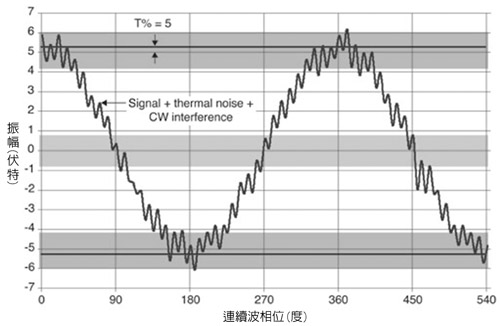 |
| 圖5 合成訊號的時域波形 |
DSP與檢波器均可協助判斷RFI類型
有幾種方法可以判斷RFI的屬性,其中比較可行的是DSP法和CWI檢波器(Detector)法。DSP法又稱為頻譜移除(Spectrum Excision)法,利用一個功能強大的數位訊號處理器在一個統計的時間區間內對數位中頻訊號進行離散傅立葉轉換(Discrete Fourier Transform, DFT),藉由觀察每個離散的頻譜區間中的頻譜封絡(Frequency Envelope)來決定雜訊層的位準。這個方法可輕易地偵測出任何突出雜訊層的CWI或MRI,然後再利用DSP來產生橫向濾波器(Transversal Filter)將之剷平。不過DSP法會消耗龐大的計算資源且須要進行高解析度的振幅取樣,因此ADC的位元數至少必須在10位元以上。
另外一種方法並不需要複雜的DSP運算,只須要用到簡單的數位硬體和非均勻量化(Non-uniform Quantizing)的ADC,此種方法只能偵測出固定頻率固定封絡的CWI,對非固定頻率和封絡的CWI則無效。利用非均勻量化ADC來抑制CWI的峰值振幅的效果有限無法提供較大的CWI抑制能力。圖6為利用簡單的數位硬體來偵測CWI並利用非均勻量化的ADC來抑制CWI(除了原始在雜訊層附近的零穿越)。
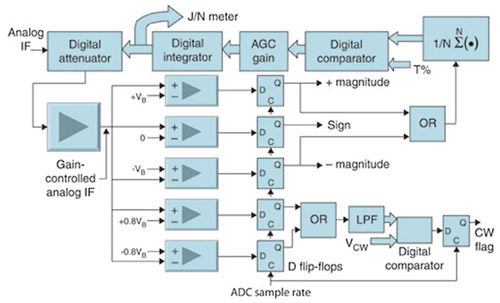 |
| 圖6 利用簡單的數位硬體和非均勻量化的ADC來偵測和抑制CWI |
從圖6中可發現CWI偵測器是由類比的比較器、D型正反器(Flip-flop)、OR閘、低通濾波器和數位比較器所構成。其中類比比較器和D型正反器為ADC的一部分,為參考偏壓的位準,利用正參考偏壓和負參考偏壓來偵測CWI的存在。
CWI時域的波形為正弦波,只要正弦波的瞬時電壓高於或低於正或負參考偏壓,兩個D型正反器中就有一個會有邏輯1的輸出,也就是OR閘的輸出為邏輯1;當正弦波的順時電壓低於或高於正或負參考偏壓時,兩個D型正反器的輸出皆為邏輯0,此時OR閘的輸出也是邏輯0。
低通濾波器就是將N個取樣值加總之後在除以N做平坦化的動作。利用一個預設的CW波形電壓的參考值來和低通濾波器的輸出值進行比較,當低通濾波器的輸出值大於CW參考電壓時,CWI旗標會被設為1表示存在CWI。當低通濾波器的輸出值小於CW參考電壓時,CWI旗標會被設為0,且AGC的設定點變動時就表示RFI的屬性為BLWN。當CWI旗標設為1時表示RFI的屬性為CW訊號,利用多位元ADC和非均勻量化來增加合成訊號落入零穿越的機率增加GPS訊號偵測的機率。當CWI旗標設為0時表示RFI的屬性為BLWN,數位AGC會告知GPS頻道做適應性的訊號擷取(Adaptive Signal Acquisition),也就是在訊號擷取的階段增加在頻率槽(Frequency Bin)的駐留時間(Dwell Time)來延長同相積分的時間長度。
調整參考頻率可克服 相位雜訊干擾
GPS射頻晶片內的頻率合成器(Frequency Synthesizer)是利用參考頻率來產生本地振盪器(Local Oscillator, LO)的頻率。當LO頻率和參考頻率的除值越大時,亦會放大參考頻率的相位雜訊。這些相位雜訊再加上頻率合成器自身的相位雜訊,會在LO上產生相對應的相位雜訊。在降頻的過程中,LO上面的相位雜訊會被混波至輸入的GPS訊號上,進而降低GPS接收機的性能。
為解決這個問題,將參考頻率源的輸出頻率往上提升來降低LO和參考頻率的除值是可行的作法,例如從原始的16.368MHz提升到目前常用的26MHz,即可改善相位雜訊。目前所使用的溫度補償晶體振盪器(TCXO)都可以輕易的滿足此限制,因此提升參考頻率至26MHz主要的考量,是希望藉由和主機系統採用相同的參考頻率來共享相同的頻率源以降低材料成本。高通的gpsOne解決方案中所使用的參考頻率源為溫度控制型石英晶體振盪器(VCTCXO),由於頻率的可調性導致VCTCXO先天上會比TCXO有較大的相位雜訊。
按步就班分析 系統干擾難遁形
要解決系統干擾的問題,必須從找出干擾源開始著手,然後才能對症下藥解決問題。通常鎖定系統干擾源的方法為利用頻譜分析儀進行量測以及與黃金樣本(Golden Unit)對照兩種作法。利用頻譜分析儀(Spectrum Analyzer, SA)找出干擾源的頻率和屬性。一般來說只要CWI和MRI的功率高過雜訊層3~5dB(約-108dBm)就可利用頻譜分析儀找出干擾源的頻率和屬性。寬頻雜訊則無法藉由頻譜分析儀量測,只能利用基頻的相對C/N0值發現。
若要鎖定寬頻干擾源,則必須利用黃金樣本(Golden Unit)加外部天線的方式來掃描待測物(Device Under Test, DUT),以找出寬頻雜訊及可能的CWI干擾源(圖7)。在這個量測方法中,通常都是利用黃金樣本所輸出的C/N0值當作參考依據,以量測待測物因寬頻雜訊所增加的雜訊指數量。這種方法也可以用來量測CWI/MRI對AGC迴路所造成的增益降低。
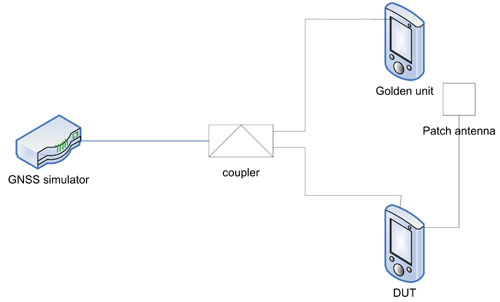 |
| 圖7 利用黃金樣本找出干擾源的量測方法 |
工程師在進行這種量測工作時,第一步須先將待測物關閉,從黃金樣本得到在沒有干擾時的C/N
0值。在取得參考值之後,將DUT的電源開啟,DUT的干擾訊號將會透過耦合器(Coupler)耦合至黃金樣本。移動貼片天線的位置到DUT上所有可能的干擾源,同時觀察黃金樣本上的C/N
0值的變化就可以找出干擾源的位置。
當工程師在頻譜分析儀上發現GPS頻段中出現CWI或MRI干擾訊號時,應先試著鎖定其頻率,然後試著去推算是哪一個控制時脈的基頻頻率的高階諧波所產生。如果是單一時脈的高階諧波所產生的CWI,可以容易的利用頻譜分析儀找出CWI的頻率間距,兩個相鄰的CWI的頻率差就是干擾訊號的基頻頻率。計算出干擾源的基頻頻率後,找出相對應該基頻頻率的系統或周邊的元件時脈,並嘗試更改時脈頻率確保其高階諧波成分不會掉入GPS頻段。
有時候,GPS頻段出現系統干擾的原因可能不是來自單一元件,而是兩個外頻CWI互調變之後所造成的結果。如圖8所示,這CWI1與CWI2雖然是在GPS的頻段之外,但由於在射頻(RF)濾波器的頻帶之內,因此無法藉由RF濾波器提供足夠的外頻衰減,導致此一干擾訊號的功率偏高。
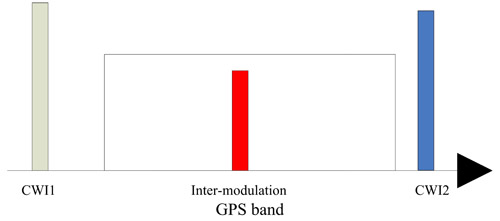 |
| 圖8 兩根外頻的CWI的互調變成分掉入GPS頻帶內 |
當這種情況發生時,工程師應試著找出產生互調變CWI的相鄰兩根CWI的頻率,這兩根CWI絕大多數也是來自數位時脈的高階諧波。因此只要分別找出相對應的基頻頻率以及基頻時脈的干擾源,再試著更改其中一個干擾源的基頻頻率使得互調變的成分不要落入GPS的頻帶,即可紓解這類干擾。
此外,若系統所採用的GPS接收機為低中頻(Low IF, LIF)架構時,除了要掃描GPS的頻段之外,還必須掃描該接收機的鏡頻。工程師可試著從IC業者所提供的資料找出射頻晶片鏡頻抑制的能力(dB),將SA上所量測到的CWI的功率減掉射頻晶片鏡頻抑制的能力,就是實際落入GPS頻段的CWI的功率。
整體來說,利用系統端分析來更改干擾源的基頻頻率,使其高階諧波或高階諧波的互調變成分不要落入GPS頻帶的方法,只是一種暫時的解決方案(Work-around)。因為任意更改系統或周邊元件的時脈,有可能會導致系統的不穩定以及畫面的閃爍(Flicker),最佳的解決方案還是透過GPS晶片的數位訊號處理的技術來 提高GPS量測引擎(Measurement Engine)對同頻干擾的偵測和抑制能力。
干擾成因千頭萬緒 對應方式各有巧妙
由於手機本身已經成為一個匯聚眾多無線通訊功能的整合型裝置,因此要在手機中整合GPS接收功能,勢必面臨許多同頻與外頻干擾;系統本身所採用的參考時脈源本身也經常成為一個主要的干擾源,須進行系統級的量測才能揪出真正的干擾源所在,進而採取適當的對應手段來提升GPS接收機的性能表現。 總之,唯有反覆進行各種量測並針對各種不同干擾類型採取適當作法,才能設計出具備卓越GPS接收功能的手機。
| 參考資料 |
.Steve Rounds, Jamming Protection of GPS Receivers: Part II: Antenna Enhancements, in GPS World Vol. 15, No. 2, Feb 2004, pp. 38-45.
.Felix Butsch, Radiofrequency Interference and GPS: A Growing Concern, in GPS World, Vol. 13, No. 10, Oct 2002, pp. 40-50.
.Philip W. Ward, What’s Going On? RFI Situational Awareness in GNSS Receivers, in Inside GNSS Vol. 2, No. 6, Sep/Oct 2007, pp. 34-42.
.F. Amoroso, Adaptive A/D Converter to Suppress CW Interference in DSPN Spread-Spectrum Communications, IEEE transactions on Communications, Vol. Com-31, No. 10, Oct 1983, pp. 1117-1123. |