數位化如今正於製造業闖出一片天,其中熱門的工業4.0扮演了重要角色。隨之而來的是大量的數據,產自感應器和致動器、自我和遠端診斷,以及從一台機器傳到另台機器上的資料。
若是與自動化工程師討論機器及現場層級的通訊,EtherCAT這類即時乙太網路協定的主題,乃是難以迴避的課題,因為傳統的現場匯流排系統在即時性方面逐漸遭遇技術上的限制。
EtherCAT問世多時 業界行之有年
EtherCAT是乙太網路式的現場匯流排系統,於2003年推出,2007年達到標準化。系統提供了高速的資料傳輸率,用EtherCAT節點在運行中期間處理主機送出的電報。
EtherCAT的從屬裝置在電報通過裝置時,會擷取要送給它們的資料。同樣地,所欲輸入的資料,會在電報通過時插進電報裡。如此只會對電報造成數奈秒(ns)的延遲。電報在每一從站只有3位元的硬體延遲。至於運作期間的處理,則由從站使用EtherCAT從屬控制器(ESC)。不論是特殊應用積體電路(ASIC)、現場可編程閘陣列(FPGA)、獨立交換器或微處理器(MPU)的形式,都能運作自如。
EtherCAT是由倍福(Beckhoff)與EtherCAT Technology Group(ETG)所開發而成,屬於開放式的技術,扎根於IEC 61158和IEC 61784國際標準以及ISO 15745-4。此種高速工業乙太網路系統,最適用於注重時間的動作控制應用層面上。常見應用包括包裝機、射出成形機、快速壓床、電腦數值控制(CNC)加工中心機、機器人和液壓控制等。
EtherCAT採取分散式的時脈系統(DC)以精準同步機群內的所有節點,比1微秒(μs)更為準確。
在用戶的組態和診斷方面,則可以使用非週期性通訊,存取網路可用的變數,這就有賴於穩定可靠的郵件信箱通訊協定。至於EtherCAT以此郵件信箱通道為基礎,可以決定多種不同的通訊規範:EtherCAT CAN應用程式通訊協定(CAN application protocol over EtherCAT, CoE)、依據IEC 61800-7-204的伺服驅動規範(SoE)、EtherCAT乙太網路(Ethernet over EtherCAT, EoE)、EtherCAT安全協議(Safety over EtherCAT, FSoE)以及EtherCAT檔案存取(File Access over EtherCAT, FoE)用於韌體更新。高效率的EtherCAT實作,理當要能平行處理多種不同的協定。
EtherCAT高效實作 兼具效能表現及穩定度
即時乙太網路在整體的工業通訊市場內的市占率不斷成長,目前達到約40%之多。然而,即使擁有了數種即時乙太網路系統,驅動系統、電力線通訊(PLC)和輸入輸出(I/O)模組製造商的眼前仍然橫有阻礙:首先是缺乏有週期時間的時序決定機制,最好可以低到個位數微秒範圍。除此之外,有時候協定尚未完全開發,而實作的成本效益不彰。
另一方面,EtherCAT自2004年起就未有變化。最早出現的裝置,仍能與位於相同網路上的最新產品進行通訊,儘管從以前到現在升級了許多功能。不只如此,EtherCAT從三位數低到兩位數微秒的範圍內,在同步運作的時序決定機制下表現得可圈可點。困難在於如何符合成本效益,簡便地進行EtherCAT的實作。
時至今日,相應的高度整合、已優化微處理器,仍然可遇不可求。32位元微控制器XMC4800及XMC4300,則改變了這樣的情況。該系列微控制器不僅搭載安謀國際(ARM)的Cortex-M4處理器,更是首見配備了整合式EtherCAT從屬控制器,再加上晶片快閃記憶體(Flash Memory)和類比/混合訊號IP的微控制器。
相較於使用微處理器、FPGA或ASIC的傳統解決方案,使用XMC4300和XCM4800實作EtherCAT不但更簡單,也更節省空間和成本。使用EtherCAT從屬控制器,就無需外部記憶體或石英鐘產生器等額外組件。
相較傳統解決方案 所需組件數量更少
採用XMC4800與XMC4300的系統解決方案,高度整合了多種快閃記憶體與類比/混合訊號IP,比其他微處理器解決方案更能節省外部組件的數量,進而省下更多印刷電路板(PCB)的空間和成本(圖1)。ASIC和FPGA解決方案在整合和效能方面有所不足,而獨立的EtherCAT從屬控制器須要外接中央處理器(CPU),也有其相應的限制。
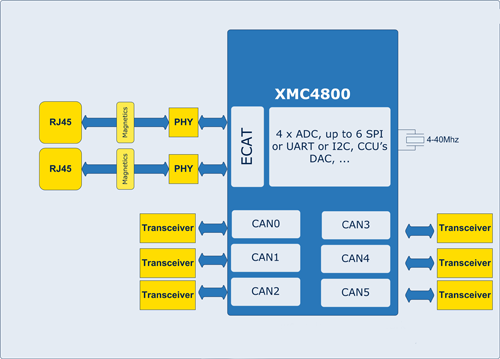 |
| 圖1 由於採用EtherCAT從屬控制器,使用XMC4300與XMC4800控制器時,無需外部記憶體或石英鐘產生器這類額外的組件。 |
XMC4300與XMC4800內建的鎖相迴路(PLL)便可供應EtherCAT IP所需的25MHz時脈。程式碼由ARM的Cortex M4處理器以144MHz直接從內建的隨機存取記憶體(RAM)或快閃記憶體執行。
使用外部記憶體須要考量到另一個因素:整個生命週期中產品維護上的困難。記憶體製造商會配合個人電腦和行動運算產業,優化自身的技術,結果導致晶片常常在幾年內即告停產。如此情況並不符合工業系統的生命週期,基本上這些系統中的機器壽命至少是15年以上。XMC4300與XMC4800考慮到這一點,XMC4000系列的所有微控制器也不例外,並一律提供長期可供貨的保證,至少可至2031年。
獨立EtherCAT交換器 可能導致延遲發生
獨立的EtherCAT交換器,經常被當作EtherCAT從屬節點實作上的替代品。以XMC4300與XMC4800微控制器實作,亦提供超越這類解決方案的多項優勢,因為獨立的交換器上並未內建CPU(圖2)。因此,如果需要實現EtherCAT從站,還必須另行外接記憶體和時脈產生器。
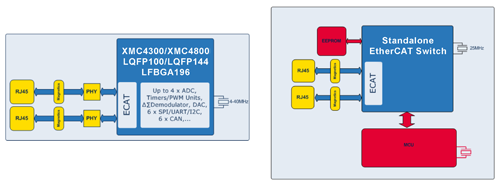 |
| 圖2 XMC4300/XMC4800實作及專用EtherCAT交換器比較圖 |
在資料流量方面,以XMC微控制器為基礎的系統解決方案表現也很優異,新解決方案的資料會透過內部的32位元匯流排在EtherCAT IP與CPU之間傳輸資料,最高可達144MHz。
相較之下,獨立EtherCAT交換器搭配外部CPU要透過序列介面來交換資料,因此匯流排寬度一般為8位元或16位元。除此之外,可能經過多工處理的資料或位址的傳輸和設定/保留時間,導致了進一步的延遲。
在評估EtherCAT解決方案之際,基礎的EtherCAT IP也是很重要的考量點。XMC4300與XMC 4800使用Beckhoff ET1100以及所有整合式系統的功能。包括八個現場匯流排記憶體管理單元(FMMU)、八個主動低同步針腳(SYNC)管理器、8kB資料RAM以及分散式時脈系統(64位元)。
相較之下,其他解決方案可能會以ET1200為基底,其僅為ET1100的子集,只有三個FMMU、四個SYNC管理器以及4kB資料RAM。這也會拖累系統資源,而導致上述所有EtherCAT協定(CoE、FoE、FSoe和EoE)無法完全同時執行。
整合式Beckhoff控制器 EtherCAT運作更順暢
除了EtherCAT從屬控制器外,XMC4300與XMC4800還提供眾多周邊設備,如圖3∼4所示。
XMC4800擁有豐富的系統資源,除了EtherCAT通訊外,還可達到高效能的致動器和感應器在控制方面的實作。舉例而言,除了EtherCAT外,其還可實行雙馬達的控制,位置監控(POSIF介面)也包括在內。
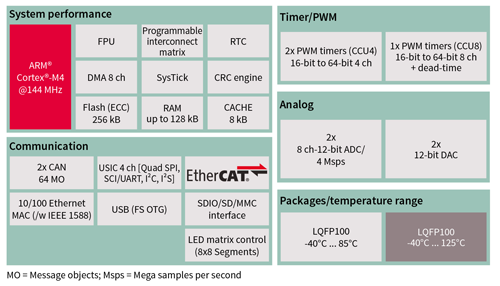 |
| 圖3 XMC4300方塊圖。ARM Cortex-M4與EtherCAT節點透過144MHz時脈的連線進行通訊。 |
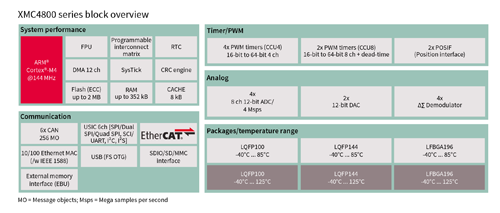 |
| 圖4 XMC4800方塊圖。該晶片延伸的周邊多達六個CAN節點、四個類比數位轉換器,且快閃記憶體多達2MB。 |
XMC4300在EtherCAT方面與XMC4800不相上下,但僅能控制較單純的致動器和感應器,如I/O模組。除了上述的ARM Cortex-M4處理器外,XMC4300還擁有256kB的快閃記憶體和128kB的RAM,特別著重於通訊以及致動器和感應器。其也提供了兩個控制區域網路(CAN)節點,隨後的通訊盡可能無須CPU互動。即使在閘道模式中,以不同的傳輸速率在不同的CAN網路之間進行交換,而不使用運算引擎介入,狀況亦是如此。在混合CAN與EtherCAT的網路中,XMC4300可針對安裝提供簡潔的解決方案,能夠透過數位媒體轉接器(DMA)傳輸,有效建立從CAN至EtherCAT的閘道。
此外,還有序列介面通用非同步收發傳輸器(UART)、序列周邊介面(SPI)、I2C和I2S,可由USIC可程式介面進行實作。另外有通用序列匯流排(USB)介面和安全數位輸入輸出(SDIO)/SD/MMC介面可供連接大量儲存裝置。TCP/IP乙太網路介面可供以簡易方式執行(遠端)診斷及維護。加上XMC4300具背整合式發光二極體(LED)矩陣控制(8×8區段)可控制LED陣列。
除了通訊介面外,整合類比及混合訊號IP也值得矚目。舉例而言,XMC4300配備兩個12位元類比數位轉換器(ADC)。針對致動器,它內建有計時器單元,可控制一個完整的全橋,兩個計時器單元用於半橋,以及兩個12位元數位類比轉換器(DAC)。如此便能控制馬達,同時讓EtherCAT通訊平行運作。
XMC4300最適合用於實作I/O模組。舉例說明,如果骨幹所需頻寬大於CAN匯流排或序列協定可提供的量,則XMC4300就是理想選擇(圖5)。採用LQFP100封裝的XMC4300提供兩種版本,溫度範圍分別為-40∼85℃及-40∼125℃。
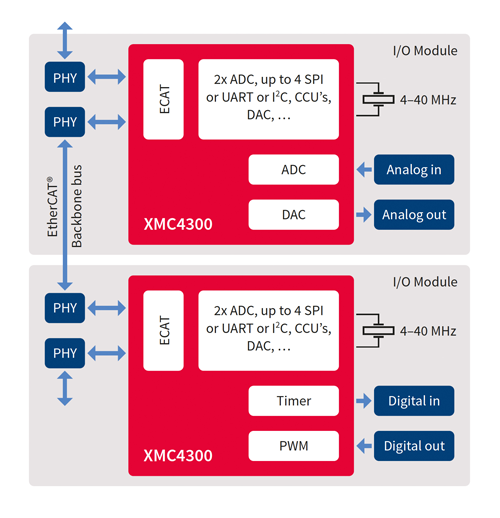 |
| 圖5 I/O模組搭配EtherCAT骨幹匯流排及實體(PHY)至實體連接 |
如果需要更好的效能或更多的連線功能,相容的XMC4000系列之中,XMC4800系列可提供最高2MB的快閃記憶體及352kB的RAM,還有更多的周邊設備和不同封裝。除了記憶體容量更大外,與XMC4300系列的關鍵差異在於有六個CAN節點、一個外部記憶體介面(EBU)、四個12位元類比數位轉換器、總共六個計時器(XMC4300為三個)、一個整合式定位介面(POSIF)、以及四個Delta Sigma調解器。XMC4800衍生版本分為LQFP-100、LQFP-144與LQFP-196封裝。
XMC4300與XMC4800的針腳和程式碼均相容。同樣地,XMC4300及XMC4800系列總共能夠組成二十種產品,搭配不同的周邊設備、封裝、記憶體容量及溫度範圍,因此為應用相關的EtherCAT實作提供了全方位的產品系列。
若是須要立即以XMC4300與XMC4800微處理器設置EtherCAT節點,也有開發板和相對應的軟體開發工具。XMC4300 Relax EtherCAT套件包含XMC4300微處理器,並內建有除錯器、採用標準RJ45接頭的EtherCAT節點(外加選用PHY至PHY連接的排針)以及採用九極D-Sub插頭的CAN節點及USB埠。至於XMC4800系列,也提供有開發板的XMC4800 Relax EtherCAT套件(圖6)。
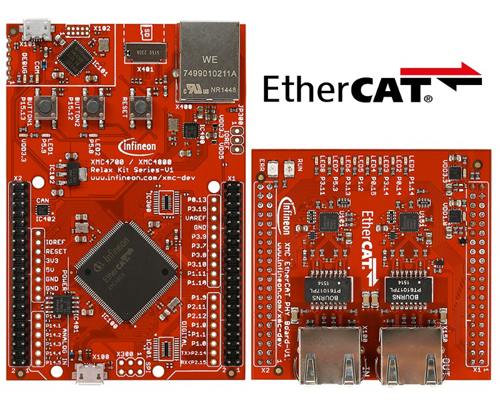 |
| 圖6 迅速輕鬆地以XMC4800 Relax EtherCAT套件設置EtherCAT節點 |
開發板/軟體工具襄助 EtherCAT開發時程加快
在軟體開發方面,有免費的DAVE開發環境可用,以及適用於低階驅動器的程式庫與應用程式。此外,DAVE針對EtherCAT使用Beckhoff的從屬堆疊程式碼(Slave Stack Code, SSC)。除了免費的開發環境外,亦提供知名的第三方製造商的商用EtherCAT從屬堆疊。
兩款套件均成功通過EtherCAT技術群組的一致性測試。因此證明XMC型的EtherCAT解決方案可順暢地與所有領先的工業控制系統(EtherCAT主機)一同運作。
符合製造業環境要求 EtherCAT晶片後勢看好
傳統上,EtherCAT主要應用在工廠自動化,以及所有要求現場匯流排提供即時需求的應用方式,而工程機械以及農用車輛和工業卡車也包含在內。不過,到目前為止,EtherCAT晶片在品質和可靠性上時常無法達到必要標準,例如在汽車製造業中,晶片必須要能承受更廣的溫度範圍,須高達125℃,該二款晶片通過AEC-Q100標準可證明其可靠性。
(本文作者任職於英飛凌)