全球衛星定位系統(GPS)衛星的軌道距離地表大約為20,500公里,因此從GPS衛星所發射的訊號抵達地球表面後已經相當微弱;GPS系統當初設計的目的,並非提供室內環境所使用,一般而言室內環境中的GPS訊號都已嚴重衰減,且多重路徑也嚴重影響位置的精確度。
在GPS晶片供應商的努力下,已經能利用硬體和訊號處理技術突破這些物理上的限制,現階段所有的技術中,總會存在一些妥協而無法十全十美,目前商用的GPS接收機的追蹤靈敏度大致可達-158~-160dBm之間。超緊密結合的GPS/INS接收機被視為下一世代GPS技術中最有可能商用化的技術之一,接著將介紹超緊密結合GPS/INS接收機的最新發展狀況及理論基礎。
傳統GPS接收機不利室內使用
在戶外GPS的訊號強度大約為-126~-130dBm之間,與衛星在軌道的位置及大氣層的條件有關,因此GPS系統原始設計的目的是給具有開放天空(Open Sky)的用戶使用。目前很多行動電話的業者已採用GPS來滿足E-911的要求,然而GPS系統在室內(Indoor)的訊號取得及精確度仍構成室內服務的限制。無論如何,GPS已被視為是提供定址服務(Location Based Service, LBS)的最佳解決方案。
假設室內的衰減量大約是10~30dB,對一個室內GPS接收機而言必須能偵測到-146~-160dBm的訊號。20dB的衰減量只適用於低樓層的磚造建築物,在較結實的建築物如高樓層或購物中心內,訊號的衰減量大約是30dB;要藉由傳統的GPS接收機解出如此弱的訊號將難以實現。若透過韌體將傳統的GPS接收機在每一個頻率槽(Frequency Beam)的停留時間設為10秒鐘,在搜尋所有可能的相位延遲上所花費的最大時間為 小時。在這段時間內衛星的星座圖(Constellation)早已改變許多,甚至所觀測的衛星頻率飄移將達到5kHz的範圍。由此可知,未配置大量平行相關器(Massive Parallel Correlators)的傳統GPS接收機將不可能使用在室內環境中。
小時。在這段時間內衛星的星座圖(Constellation)早已改變許多,甚至所觀測的衛星頻率飄移將達到5kHz的範圍。由此可知,未配置大量平行相關器(Massive Parallel Correlators)的傳統GPS接收機將不可能使用在室內環境中。
GPS若要能在室內使用,必須額外獲得20~30 dB的處理增益(Processing Gain),因此GPS接收機不僅需要獲得足夠的輔助資料,且還要能以平行的方式搜尋所有可能的碼空間(Code Space),具備此種架構的接收機,可在每一個可能的頻率槽停留夠長的時間,約數十到數百毫秒,以得到較佳的靈敏度,且處理增益會隨著停留時間的增加而變大。
所謂的高感度GPS(High-sensitivity GPS, HSGPS)大致上可以使用任何技術所能夠達到的靈敏度,會高於使用20毫秒時間長度的同相累加(Coherent Integration)所能達到的靈敏度去定義。
利用A-GPS的架構可以讓接收機在相同的頻率槽內搜尋十倍長的時間,因而產生較高的靈敏度,一般約可改善10dB。真正的室內GPS接收機無法僅依靠這些輔助資料,室內GPS需要大量的平行相關器。藉由輔助資訊的提供對靈敏度的貢獻不會超過10dB,對室內的應用而言靈敏度的增加須超過20dB。
將各個具有較短時間長度的同相位訊號進行同相累加之後,再將各個區塊(Segment)用非同相(Non-coherent)的方式累加,可以使靈敏度出現顯著改善。非同相的技術會受到平方損失(Squaring Loss)的限制,此限制會隨著接收到的訊號越來越弱而日益嚴重。利用長時間的同相累加技術可以提供最佳的處理增益且不會產生平方損失。如何能延長同相累加的時間長度,已成為高感度GPS接收機設計的一項挑戰。圖1為利用延長同相累加的時間長度提升GPS接收機的靈敏度。
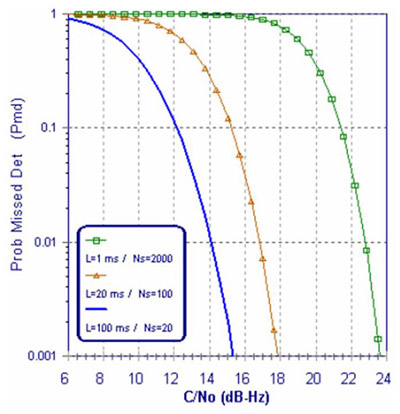 |
| 圖1 延長同相累加的週期可以改善GPS的靈敏度 |
至少有三個主要因素會限制GPS接收機中的處理增益,第一個限制是導因於導航資料位元(Navigation Data Bit)的長度對同相累加的時間長度所造成的限制,一個導航資料位元的長度為20毫秒。導航位元是一個雙相位編碼且具有50Hz的資料率,因此一個導航位元的資料長度為20毫秒。一個C/A碼的長度為1毫秒,所以一個導航位元是由20個具有相同相位的C/A碼所組成。假如在相鄰的導航位元之間存在著相位變動,則相鄰的兩個C/A碼會具有±π的差產生。這一個相位的變動對導航位元的取得是一個很重要的訊息,可以確保在兩個連續10毫秒的時間上至少存在有一個10毫秒的時間長度,不會產生相位變動且可利用同相累加的方式取得導航位元。
目前GPS接收機已可以利用A-GPS所提供的輔助資料,或內部的啟發式解法(Heuristic Method)輕易的超過20毫秒的限制(圖2)。其他兩個限制因素會和接收機的載波追蹤迴路(Carrier Tracking Loop)與頻率錯誤對靈敏度降低有關,對同相累加而言,接收到的載波頻率和接收機電壓控制震盪器(Voltage Control Oscillator, VCO)所產生的頻率須維持一致,雖不須達到相同但在同相累加的時間內,頻率的位移量須維持常數。當載波頻率和VCO輸出的頻率在同相累加時間內改變時,將會導致相位關係的變動。最差的情況為當相位變化成一循環(Cycle)時將呈現完全的抵銷,這是因為同相位累加所帶來的益處,而此情況會發生在當頻率變化量等於積分時間的倒數時。
其中△f為GPS訊號載波頻率和VCO輸出頻率在同相累加期間的變化量;T為同相累加的時間長度。如圖3所示,接收功率和頻率位移間的關係會遵循sinc2的關係。
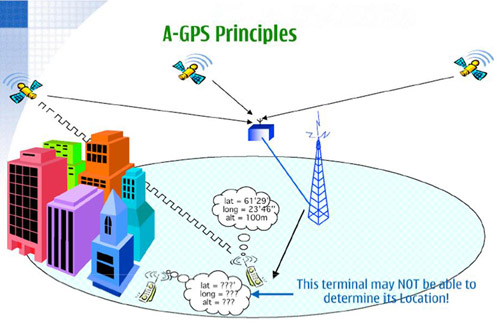 |
| 圖2 利用AGPS提供輔助資料給GPS接收機 |
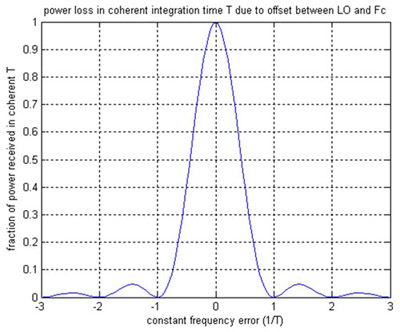 |
| 圖3 頻率變動和同相累積週期間的關係 |
一個通用的經驗法則是將頻率變動量維持在3T分之一,也就是最大可接收功率的68%。當使用長時間的同相累積時,GPS接收機因為相對運動所造成的都普勒(Doppler)效應,相較於對長時間同相累積對頻率變動的容忍值會顯得相當嚴重。如車輛在0.5g的加速度之下可以在GPS L1頻率產生約25Hz/s的都普勒效應。為了滿足之前所提出的準則,在0.5g的加速度之下最大同相累積的時間長度為160毫秒。若要在室內使用,同相累積的時間長度可達到1秒,此時對都普勒效應的要求為0.64Hz/s相當於0.01g的相對加速度。0.01g相對加速度的限制不管是在室內或是如多層道路的底部的弱訊號區都不合理。表1為根據使用者的行車和步行模式,進行相對運動對訊號取得和追蹤的影響整理探討。
| 表1 行車和步行模式的速度、加速度和Jerk |
| 行車模式 |
步行模式 |
| 車行速度 |
100kph |
步行速度 |
8kph |
| 速度 |
80m/s |
速度 |
2m/s |
| 加速度 |
4g(40m/s2) |
加速度 |
0.25g(2.5m/s2) |
| Jerk |
0.5g/m~5m/s3 |
Jerk |
0.25g/m~2.5m/s3 |
解決方案其實並不難,直覺上可利用慣性量測單元(Inertial Measurement Unit, IMU)量測接收機的運動,並且在同相累加期間為此運動進行補償。此技術稱為超緊密結合GPS/INS接收機,目前可算是下一世代GPS接收機最可行的方案之一。隨著IMU如重力加速感測器(G-sensor)、陀螺儀(Gyro Meter)的價格、大小及準確度的提升,超緊密結合GPS/INS接收機的普及將指日可待。
超緊密結合GPS/INS接收機現形
GPS和慣性感測器具有互補的特性。傳統上大多數整合GPS和慣性感測器的GPS/INS系統都是採用鬆結合(Loose Integration)或緊結合(Tight Integration)的任一種方式。
所謂的鬆結合是指在位置、速度和高度層級的整合,如較新式的個人導航裝置(Personal Navigation Device, PND),已逐漸納入慣性感測器來輔助位置的計算,即一般統稱的航位推算(Dead Reckoning, DR)。
圖4為鬆結合的架構圖,鬆結合為目前最簡易的整合方式。在此種架構中,GPS接收機和慣性感測元件會各自獨立產生位置資訊,這兩個獨立的資訊會整合在一起產生一組位置資訊,與傳統的GPS接收機相比,鬆結合GPS/INS接收機具有較高的頻寬和較佳的抗雜訊能力。在一般商用貨車用等級的慣性感測器,只能有短暫失去GPS衛星訊號期間提供位置資訊的情況下,為了提升精確度,在尚未失去衛星訊號之前須藉由衛星訊號的位置資訊對這些慣性感測器進行校正,而GPS/INS系統會提供回授訊號給感測器進行校正。
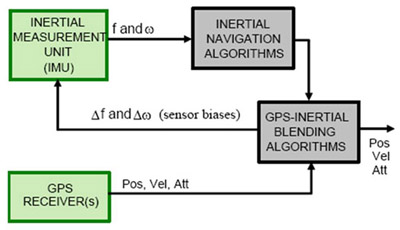 |
| 圖4 GPS/INS鬆結合的架構 |
另一種更複雜的整合稱為緊結合,在緊結合中GPS的偽距離(Pseudo-range, PR)、都普勒和載波相位(Carrier Phase, CP)會和感測器的位置資訊進行整合。緊結合可提供比鬆結合更為精確的位置資訊,因為在緊結合架構中所使用的GPS觀測資料為PR、都普勒和CP,而這些資料基本上與鬆結合所使用的位置、速度和高度的資訊並非緊密相關;此外,緊結合提供了更為靈敏的錯誤偵測和隔離架構,利用此優勢將可驗證GPS接收機對PR和都普勒量測的品質。圖5顯示緊結合系統的架構。
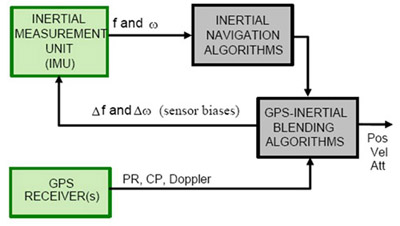 |
| 圖5 具有緊結合的GPS/INS系統架構 |
上述兩種整合方式並無法提供改善GPS靈敏度及增加對射頻干擾的抵抗力(Anti-jamming)。第三種方式的整合也是最複雜的整合方式稱為超緊密結合(Ultra-tight Integration),在此種結合之下,慣性感測器可直接對GPS的相位/載波和碼追蹤迴圈進行輔助。此外,超緊密結合GPS/INS接收機可縮短GPS訊號的取得時間和鎖相迴路對雜訊抑制的能力,因此提供更為精確的都普勒和相位量測。圖6所示為具有超緊密結合的GPS/INS系統的架構。
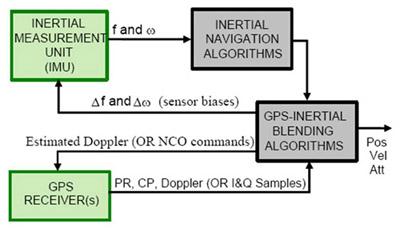 |
| 圖6 具有超緊密結合GPS/INS的系統架構 |
超緊密結合的GPS/INS系統與前兩個架構相較之下更複雜許多,因為它會改變GPS接收機的追蹤迴圈。超緊密結合的GPS/INS接收機會整合來自GPS追蹤迴圈的同相(I)和正交相(Q)訊號及來自慣性導航系統(Inertial Navigation System, INS)的位置和速度的資訊。如何整合來自INS和GPS的訊號,是設計的一個關鍵因素。INS利用適當的數學模型可以對付因使用者的相對運動所產生的都普勒位移,並提供輔助資訊給GPS接收機的載波追蹤迴圈,補償因為此相對運動所造成的頻率變動。利用感測器對GPS接收機參考頻率源的頻漂率的估算,可允許一個GPS頻道不中斷的追蹤,即使是在短暫的失去直線傳輸(Line-of-sight, LOS)的環境中,這個功能可避免載波相位的跳週(Cycle Slip)。
TCXO穩定度影響接收靈敏度
要實現高感度GPS接收機的另一項阻礙,就是RF前級所使用的溫度補償振盪器(TCXO)的穩定度。影響TCXO穩定度的因素主要有,因溫度變動所導致的飄移,與振盪器電路天生的短暫不穩定。這兩項因素會導致GPS接收機中VCO的輸出頻率會有位移、頻漂和抖動的現象。雖然TCXO的不穩定只有當同相累加的時間長度為數百毫秒時才會對靈敏度造成影響,但就其本身而論,TCXO所造成的效應會和因為接收機的相對運動,導致都普勒效應所造成的影響是相同的。
在手機整合GPS接收機的設計考量中,因為功率放大器(Power Amplifier, PA)TDMA所產生的循環式On/Off現象,會產生溫度梯度(Temperature Gradient),此溫度梯度以℃/sec為單位,會對TCXO造成短暫的不穩定而影響GPS的C/N值。因為TDMA叢發(Burst)所產生的溫度梯度可藉由以下方式減輕溫度梯度,謹慎的將TCXO和PA接地連結的寬度降低,如挑選具有較高溫度穩定度的TCXO或VCTCXO;或者是在TCXO/VCTCXO旁邊增加可以隔絕熱流的材料;抑或利用適當的電路布局等。
真實世界的高感度GPS接收機也會受到一些限制,長時間的同相累積雖然可以增加GPS的靈敏度,但在實用上卻出現一些限制,如當同相累加時間超過1秒鐘時就會產生一些不合理的現象。絕大多數的GPS接收機都是採用1PPS的位置更新率,亦即每秒更新一次位置,若同相累加的時間超過1秒鐘時,便會和1PPS的位置更新率衝突。不過只有在室內使用時,才須要使用到高靈敏度的超長時間的同相累加,此時位置更新率可從1PPS放寬為5~10PPS因為在室內環境中,位置的變化量並不會太大。此外,須要高靈敏度的地方表示GPS的訊號是相當微弱,且具有嚴重的多重路徑成分,這些多重路徑的成分會對GPS訊號的接收和追蹤產生顯著影響,導致位置計算的飄移。
TCXO的性能(圖7),會影響GPS性能的因素包含了以下幾點,首先是首次定位時間(Time To First Tix, TTFF),較佳的TCXO穩定度可以降低GPS訊號的收尋視窗因而減少TTFF。通常評估TCXO的穩定度是根據整個工作溫度區間內,以ppm為單位量測TCXO的穩定度,而TTFF性能須和TCXO穩定度成正比。
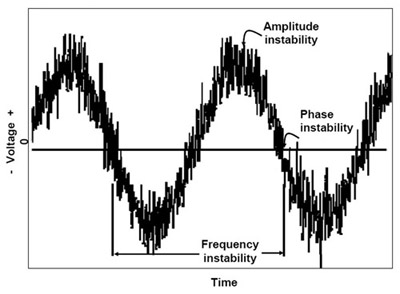 |
| 圖7 利用TCXO輸出訊號的瞬時波形來解釋相位雜訊和頻率的不穩定度 |
在位置精確度方面,頻率的擾動、震動和相位雜訊(Phase Noise),將可導致失去衛星訊號,相位雜訊則會影響到位置計算的精確度和增加系統雜訊。
就追蹤的精確度而言,在弱訊號的取得,TCXO頻率的頻漂率(Frequency Drift Rate)相當重要。頻漂率會影響衛星訊號的取得和維持,GPS系統將要求一個非常低的頻漂率,通常以ppb/sec為單位。頻漂率即使只增加一些,將可能造成多一倍的TTFF。
最後是靈敏度方面,增加同相累積的時間,將可改善對弱訊號的偵測。

其中:



有關、和的定義和相互間的關係詳見表2。
維持訊號不衰減 GPS接收機設計學問大
要在比戶外少20~30dB的室內或惡劣環境中取得並追蹤GPS訊號,GPS接收機就必須面對兩個棘手的挑戰,分別是高訊號衰減值和相對運動的效應,與多重路徑成分的影響。
要處理衰減的問題其實是相當直接的,利用訊號處理技術延長同相或非同相積分的週期即可彌補損失的SNR。
室內GPS接收機面臨幾點設計挑戰,首先是TCXO的精確度/漂移與訊號處理,整體而言,TCXO的性能會廣泛影響GPS接收機系統的性能,而訊號處理的能力主要會受到相關器的數量、頻率槽的數目、CPU的計算能力和記憶體大小等因素的影響。增加訊號處理的能力,雖有助改善GPS系統的性能,但會增加硬體的複雜度和晶片成本以及較高的功率消耗;增強TCXO/VCTCXO的參考頻率也會改善GPS接收機的整體性能。
第二項設計挑戰是用戶相對運動的考量方面,用戶的相對運動包含速度、加速度和Jerk的屬性,而參考頻率源的錯誤包含速度、加速度和Jerk的等效再加上震動和振盪器對G力的靈敏度。
最後是影響GPS接收機靈敏度的因素,取得和追蹤靈敏度是由系統軟硬體、基本展頻物理及用戶的相對運動所決定。
此外,真實世界的高感度GPS接收機也會受到一些難以控制的因素所限制,如同相積分(Pre Detection Integration, PDI)、非同相積分(Non-Coherent Summation, NCS)、偵測機率(Probability of Detection)與錯誤率(False Alarm Rate)。
同相積分一般限制為20毫秒,可藉由A-GPS的輔助將積分長度橫跨數個到數十個導航位元。SNR的改善會直接正比於積分的週期(T),但其缺點為對頻率和微跳躍(Microjump)的忍受度很低,這也就是GPS接收機無法和收機的電壓控制振盪器共享參考頻率源的主要因素。
對追蹤來說,非同相積分一般可達1秒鐘五十個20毫秒的導航位元,但會遭受到平方損失的影響降低增益。
至於偵測機率是指能夠準確識別真正衛星訊號的機率;錯誤率則是將雜訊或干擾訊號誤判為衛星訊號的能力。