新部署的導航衛星系統(GNSS),如歐洲Galileo、中國大陸北斗2(舊名指南針)以及重啟的GLONASS導航衛星系統,正在推動業界研發新型定位接收器。新型接收器至少能夠處理L1波段的所有訊號(大約1,550M?1,610MHz),既包括共用同一全球衛星定位系統(GPS)C/A L1載波頻率的衛星訊號,即二進位偏移載波(BOC)的調製訊號,例如Galileo E1 Open Service(OS),也包括採用不同載波頻率的訊號,例如中心頻率略高(大約1,550?1,610MHz)的基於分頻多重存取(FDMA)的GLONASS訊號,或者以1,561.098MHz為中心頻率的中國大陸現有的北斗2 Open Service B1I訊號。
定位接收器能夠接收兩個或更多不同導航衛星系統發射的訊號有諸多好處,例如系統穩健、搜尋到的衛星數量多、地理準確度係數高、在高樓林立城區等訊號較弱的環境內有更出色的定位性能和更高的定位準確度,這是因為如果處理得當,BOC調製訊號可取得比GPS C/A代碼更高的調諧準確度和更高的多通道抑制比。
為處理所有這些訊號,GNSS接收機對頻寬、線性和抗干擾性能的要求比傳統的消費性GPS接收機更高。這些要求對射頻前端(FE)設計人員提出新的挑戰。最後,為了能夠整合在多個平台內,射頻前端必須符合不同頻段,特別是通訊和遠端資訊處理系統最常用頻段的要求。
以下介紹一個採用65奈米(nm)互補式金屬氧化物半導體(CMOS)製程的低功耗的GPS/Galileo L1/E1 OS、GLONASS和北斗2-B1I射頻前端晶片。對於Galileo系統,考慮到中頻(IF)濾波器的頻寬僅比4MHz略高,根據大眾市場產品(消費電子產品和汽車)的性能要求,所以決定只支援OS Composite-BOC訊號中的BOC(1,1)調製訊號。
該射頻前端可在幾個不同的基本功能之間切換:僅GPS模式(窄帶中頻,大約2MHz)、GPS/Galileo模式(寬頻中頻,大約4MHz)、僅GLONASS模式、GPS/GLONASS模式、GPS/Galileo/GLONASS(G3)模式、僅北斗2模式、GPS/北斗2模式、GPS/Galileo/北斗2模式和GPS/Galileo/GLONASS/北斗2模式(GLONASS和北斗2訊號強度有所降低,其中部分原因是在相關中頻濾波器內兩個訊號重疊)。這裡將預設外部參考頻率設定為26MHz,但是該晶片有一個可編程設計頻率合成器,透過串列周邊介面(SPI)提供的正確設置,可以將常用溫度補償晶體振盪器(TCXO)頻率中的大部分頻率設為參考頻率。
射頻前端及系統架構概述
表1列出此L1/E1/G1/B1射頻前端設計的規格目標,圖1是接收器的簡明框圖。
對於GPS/Galileo訊號,接收器採用低中頻的單降頻架構,中頻頻率為4f0 (f0=1.023MHz)。
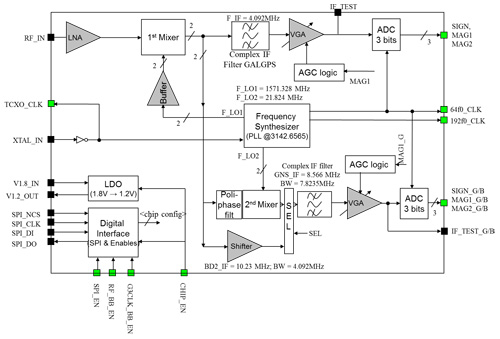 |
| 圖1 GPS/GALILEO/GLONASS/BEIDOU2 L1/E1/G1/B1I射頻前端接收器原理簡圖 |
對於GLONASS訊號,接收器採用低中頻的雙降頻架構,並與GPS/Galileo通道共用第一降頻混頻器,最終中頻約為8.566MHz。對於現在的北斗2 B1I訊號,系統架構是單降頻,在第一混頻器後,利用1,571.328MHz本振(LO)頻率取得大約10f0鏡像訊號。降頻頻率方案如圖2所示。所需的頻率全都由一個全嵌入式鎖相迴路(PLL)產生,所有處理訊號的取樣頻率為64f0。
 |
| 圖2 頻率方案:GPS/GAL、北斗2和GLONASS首次變頻後的頻段�(a);當鏈路配置成接收GLONSS訊號時,同一頻寬在第二鏈路多相濾波和二次變頻後的分布情況(b)。 |
圖1所示架構和表2產品對比表中的產品4相比,第一不同之處是,本產品將低雜訊放大器(LNA)和拉曼光纖放大器(RFA)直接相連,構成兩級LNA架構,這樣設計的優點是節省兩個外部針腳,無須網路匹配;第一個LNA級的工作電流被降低(節省約3毫安培),同時增益和雜訊指數與產品4所列架構幾乎相同。不過,這種設計也有缺點,在通道分離度和外頻(Out-of-band)抑制比方面,兩級設計的靈活性有所欠缺,因為產品4架構准許在LNA和RFA之間外接一個濾波器,例如表面聲波(SAW)濾波器。
來自天線和外部預選濾波器的GNSS訊號被該晶片內部的兩級LNA放大。要想取得最好的增益與雜訊指數比,須要進行外部輸入匹配和直流解除耦合(Decoupling)。為取得良好的隔離特性和低功耗,每級電路都基於串接(Cascode)單端配置。取得LNA目標性能所需的低衰減電感只能透過打線接合(Wire Bonding)來實現。LNA輸出內部隔離直流,直接連接第一個混頻器,利用正交(Quadrature)本振輸入頻率,使中頻濾波器的鏡像抑制比(IRR)高於20dB。LNA和混頻器部分的良好線性保證訊號不受GNSS訊號附近的射頻隔離器的影響,准許在射頻類比前端前面連接低品質的外部預選濾波器。
中頻訊號進入兩個中頻訊號鏈路,如圖2所示。第一個鏈路用於接收GPS/Galileo訊號,連接一個複雜的中頻段通濾波器,中心頻率為4f0,僅GPS配置時,1dB頻寬為2MHz;當配置成Galileo時,頻寬增至4MHz。在中頻濾波器後是有自動增益控制(AGC)功能的可變增益放大器(VGA)和類比數位轉換器(ADC)模組。
|
| 圖2 頻率方案:GPS/GAL、北斗2和GLONASS首次變頻後的頻段�(a);當鏈路配置成接收GLONSS訊號時,同一頻寬在第二鏈路多相濾波和二次變頻後的分布情況(b)。 |
第二個中頻鏈路可配置成接收北斗2 B1I或GLONASS訊號,或者根據所選資料位元能夠同時接收北斗2 B1I和GLONASS訊號。對於GLONASS,訊號鏈路與產品對比表中產品4中的架構一樣。多相濾波器(Polyphase Filter)後面跟一個第二混頻器和一個複雜的北斗2 B1I/GLONASS中頻濾波器,該濾波器經過重新設計,可降低功耗和電路尺寸,優化濾波性能。北斗2 B1I訊號通過一個移相器(Phase Shifter)繞過多相濾波器和第二混頻器,送入複雜的北斗2 B1I/GLONASS中頻濾波器。不論是哪一種情況,GLONASS/北斗2中頻濾波器輸出訊號都是送到可變增益放大器和3位元ADC,最後再送到基頻(Base-Band)處理器。
GLONASS/北斗2中頻濾波器完全不同於產品對比表中產品4的GLONASS中頻濾波器。值得注意的是,兩個訊號鏈路上的AGC和ADC模組共用同一配置,對於頻寬更大的GLONASS訊號,對配置稍做修改即可。
認識GPS/Galileo中頻鏈路
非對稱傳遞函數是本文選用複雜之中頻濾波方案的主要原因,該方案可提供良好的外頻訊號抑制比和鏡像訊號抑制。帶通濾波器的最終階數是透過串聯解除耦合一階濾波單元取得的。該濾波器有兩個工作模式:第一個模式接收GPS/Galileo兩種訊號,基於四階濾波配置;第二個模式接收僅GPS訊號,基於三階濾波配置。第二個模式的實現方式是關斷並旁通多餘的Galileo濾波級,調整其他三個濾波級的回應方式,從而降低僅GPS模式的工作電流。每個單級帶通濾波器的回應類型都屬於頻移式低通Butterworth濾波器,其設計採用跨導運算放大器和電容(gm-C或OTA-C)。每個濾波級都共用同一頻寬,以取得更大的頻寬,沿用低階中頻濾波器,提供良好的外頻訊號和鏡像抑制比。共同頻寬以4f0中頻周圍對稱布置的不同頻率為中心。
中頻濾波器後面跟隨一個由數位AGC回路驅動的可變增益放大器,增益範圍在50dB之內,用於放大輸入訊號,確保在ADC輸入端訊號強度符合要求。AGC用於控制訊號幅度,以避免或限制ADC飽和,確保動態範圍利用率。AGC基於通過測量接收訊號的閾交率(Threshold-crossing Rate)來間接估算功率的方法,即測定訊號越過閾值的次數,然後降低功率,跟蹤驅動可變增益放大器的正確操作。閾值定義的前提是假設接收的訊號遵從加成性白色高斯雜訊(AWGN)分布,因為在ADC輸入端GNSS訊號是埋在雜訊內。AGC透過一個數位電路調節積分增益Mag1位元,在某一個範圍內(例如26%至40%)修正Mag1位元的工作週期(Duty Cycle)。該工作週期範圍由基頻晶片(BB)通過串列周邊介面設定。為最大幅度降低量化損耗,該方案使用一個3位元ADC模組,把中頻訊號轉成符號位元(MSB)以及Mag1和Mag0兩個幅度位元(LSB)。
頻率合成器是一個分頻因數N/R可編程設計的整數鎖相迴路(圖3),能夠接受大多數常用的TCXO頻率(10M?52MHz)。為提高壓控振盪器(VCO)控制模式的抗噪性,降低外部元件的數量,頻率合成器使用一個嵌入式可編程設計被動式環路阻容濾波器。還可以根據每個輸入晶體頻率,透過串列周邊介面調節頻率合成器,優化傳遞函數的極點和零點位置,提高環路的穩定性。預設TCXO頻率設為26MHz。為支援其他的參考頻率,可透過串列周邊介面設置頻率合成器的參數(分頻比、環路濾波器和電荷泵電流)。
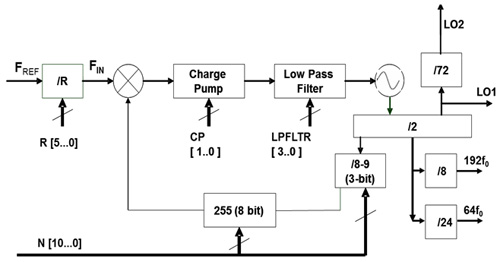 |
| 圖3 頻率合成器框圖 |
表3列出頻合器支援的部分TCXO頻率和相關分頻因數N和R值。頻率合成器內建3.142GHz壓控振盪器,二分頻分頻器為鏡像抑制混頻器產生兩個頻率預定的本振訊號(I和Q)。從這個本振開始,通過環路外分頻器(Off Loop Divider),為第二個
混頻器產生本振訊號、64f0取樣時鐘和
192f0基頻時鐘。
剖析GLONASS/北斗2中頻鏈路
對於GLONASS訊號,在從第一混頻器(I和Q格式)分出的中頻鏈路上裝有一個多相濾波器,在中心頻率約30MHz的GLONASS頻寬內提供鏡像訊號抑制功能。在這個濾波器後面是本振訊號21.824MHz的第二混頻器,在4.655M?12.4785MHz範圍內對GLONASS頻段執行最終的降頻功能。在混頻後,訊號進入選擇器,准許GLONASS或北斗2任一訊號或者兩種訊號進入下一個中頻濾波器。
對於北斗2訊號(因為鏡像訊號頻段是8.184MHz到12.276MHz),從第一混頻器分出的中頻鏈路上裝有一個移相器,該模組透過一個基本網路互換來執行倒相功能,將北斗2降頻訊號覆蓋在相位相關的GLONASS降頻訊號頻寬上,這樣兩種訊號就可以共用同一個中頻濾波器。移相模組還內建一個放大器,以平衡北斗2鏈路的增益與GLONASS鏈路的增益。移相器輸出進入選擇器,然後再送入中頻濾波器。
GLONASS/北斗2中頻濾波器是按照表4的參數設計的,為了將工作電流從產品[4]中的7.6毫安培(mA)降至大約2毫安培,縮減晶片面積,同時產品性能保持在產品[4]描述的上一代產品的水準。這之所以能夠實現是因為該射頻類比前端的取樣頻率為64f0,高於產品[4]的32f0,從而降低對中頻濾波器的參數要求,特別是外頻抑制比和抗混疊功能。
另一方面,鏡像抑制比的要求不變,仍然十分嚴格。因此,關於性能優化,該中頻濾波器分為兩部分:第一部分透過一個複雜的被動式濾波器(多相)執行鏡像訊號抑制功能;第二部分是一個主動式真三階濾波器,能夠提供所需的外頻訊號衰減功能,同時還在類比數位轉換取樣過程中充當抗混疊濾波器。四個緩衝器只執行阻抗匹配功能,透過單位增益正確驅動後面的多相濾波器(圖4)。多相濾波器由三個濾波級組成,每級的中心頻率都不相同,以取得頻段更寬的鏡像抑制比。
 |
| 圖4 複雜的GLONASS/B1I中頻濾波器框圖 |
特別是,第一級的中心頻率是10.5MHz,第二級是7.1MHz,第三級是4.5MHz,最終輸出頻率範圍約為11MHz,在布局後類比測試中,鏡像抑制比高於30dB。緩衝器和多相濾波器使頻段內(In-band)訊號損失降至3.5dB。
在多相濾波器之後,加法器將同相訊號和正交訊號混合,利用適合的鏡像抑制比取得真實訊號。該加法器提供3.3dB增益,在輸入端,當2.6MHz衰減1dB時取「零」。加法器用於限制濾波器鏈路訊號擺動,類比測試顯示,該模組的V1dB電壓(大約179毫安培)與整個濾波器相當。最後一個模組是真三階Chebychev I低通主動式濾波器,其增益為1.5dB,上轉角頻率為15.1MHz(以-1dB為參考點),頻段內波動為0.1dB。
至於GPS訊號,在中頻濾波器後面跟隨一個內建AGC回路的可變增益放大器模組和3位元ADC模組。這些模組的架構與GPS鏈路的拓撲基本相同,因為GLONASS的中心頻率基於不同的中頻,頻寬更大,必須對GPS拓撲稍加修改。
進行測量 比對結果
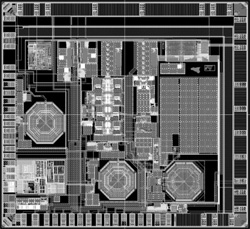 |
| 圖5 射頻前端布局 |
本文討論的射頻類比前端晶片採用CMOS 65奈米製程,包括焊片和靜電放電(ESD)保護元件在內,整個裸片面積為3.737平方毫米(mm2),前端晶片的核心部分面積為2.55平方毫米,晶片版圖如圖5所示。本文主要介紹從多個批次開發晶片樣片的評測結果,並驗證樣片測量結果是否符合表1參數。
當鏈路開啟且電源電壓為1.2伏特(V)時,測量到的工作電流約19毫安培;當只有GPS/Galileo鏈路開啟時,測量到的工作電流為14.5毫安培。在典型條件下測量GPS/GAL鏈路時,最大增益為119dB,雜訊指數(NF)為2.0dB,在測量GLONASS/北斗鏈路時,最大增益為116dB,雜訊指數為2.2dB。這兩項測量結果都符合表1的參數和布局後類比測量預期結果。
因為測試點置於可變增益放大器輸出端,所以中頻鏈路(GPS/GAL和GLONASS/B1I)都能被測試和驗證。特別的是,兩個鏈路的P1dB壓縮點(表5)、頻率回應、鏡像頻率和干擾抑制比、增益最大值和最小值、自動增益控制功能都在考慮之內並得到驗證。GPS/Galileo鏈路
幾乎全都達到規格目標,而GLONASS/
B1I鏈路的實際規格與目標規格略有不同。
中頻濾波器是決定兩個鏈路的頻響的主要因素(圖6、圖7)。在GLONASS模式第二降頻後,測量GLONASS/B1I鏈路的鏡像抑制(IR),結果是25dB,在北斗模式下,測量值為27dB(旁通第二混頻器),而在GPS/Galileo模式下,測量值與表2中產品[4]的規定一致。在GPS模式下,中頻中心頻率對稱性良好,而在Galileo模式下,因為低頻區的截止頻率更好,存在不對稱性。對於GLONASS/B1I,帶通存在大約2dB的變化(表2產品[4]的GLONASS中頻濾波器是3dB)。這個問題將在下一代產品得到解決,即使使用配套的基頻接收器的系統級測量實驗中,未發現載波雜訊比(Carrier-to-Noise Ratio)(CN0)惡化。
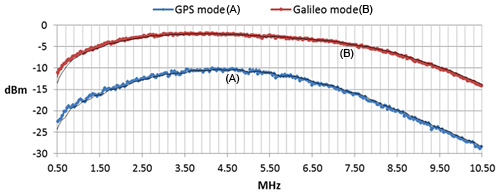 |
| 圖6 GPS/GALILEO鏈路頻響曲線對比:(A線)僅GPS;(B線)GALILEO/GPS配置 |
 |
| 圖7 GLONASS/BDS鏈路中頻頻響曲線(射頻輸入功率為-90dBm,AGC增益人工設在20dB) |
圖8所示是GPS/Galileo/GLONASS/北斗輸出測量,測試方法是先發射三個頻率,分別為1,561MHz、1,575.42MHz和1,602MHz的射頻聲音訊號,然後在同一測量工具上混合兩個測量點的輸出資料。在這種情況下,測量結果發現,GLONASS/北斗中頻濾波器的增益惡化,雜訊層略高。
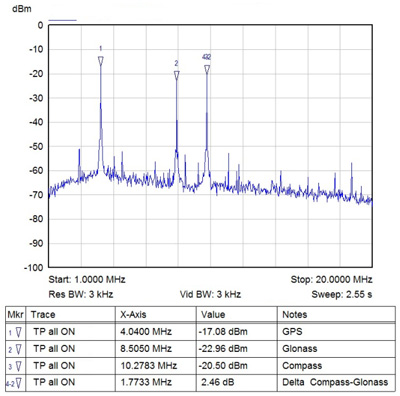 |
| 圖8 GPS/北斗/GLONASS同時輸出 |
壓控振盪器相位雜訊(Phase Noise, PN)測量方法是使用一個雜訊很低的訊號發生器向射頻輸入端發射一個-30dBm射頻訊號,並監視中頻類比訊號在兩個中頻鏈路的表現,並測量降頻相位雜訊;圖9所示是在可變增益放大器增益為20dB時的中頻相位雜訊測量值。射頻輸入位準為-30dBm表示射頻(RF)/中頻鏈路被壓縮且非線性效應未出現在相位雜訊上(在1MHz後來自載波的雜散訊號)。這裡選用這個高輸入位準從分頻器雜訊成分中匯出載波。
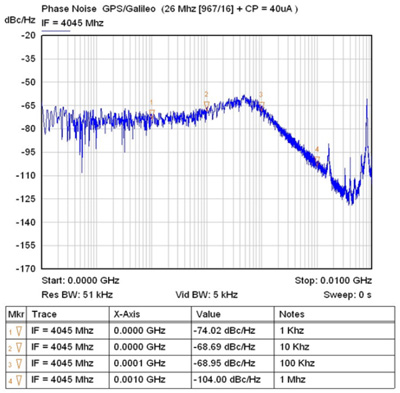 |
| 圖9 在可變增益放大器增益20dB時中頻相位雜訊測量值 |
最後,利用現有的產品資料手冊和應用筆記將這款晶片與其上一代產品及其他商用L1 GPS/Galileo/GLONASS前端晶片(產品[16]、[18]、[19]和[20])進行對比,詳見表2。與上一代產品相比,新射頻前端的鏡像抑制比較低,這是因為中頻濾波器採用不同的設計方法。但是,鏡像抑制比在整個頻率範圍內保持不變,同時更低的功耗和占用面積彌補了相位雜訊較高的缺陷。
不難發現這款晶片在功耗和面積兩項優於產品[16],這是因為採用的技術和設計不同。產品[16]的相位雜訊數值優於舊有的產品。產品[16]的雜訊指數較低,是因為採用一個外部LNA放大器,例如MAX2659,而這裡的測量實驗沒有使用外部LNA放大器;在相同條件下,該產品可取得相同或更低的雜訊指數。產品[18]的最低雜訊指數同樣更出色,但是似乎無法同時處理三種衛星訊號,通過串列周邊介面正確設置本振頻率,只能接收僅GPS、GPS/Galileo、GLONASS三種訊號中的一種訊號。雖然能取得更低的功耗(大約30毫瓦),但是雜訊指數受到影響(升至3.8dB, [18]-[19])。產品[20]是一種完全不同的設計(基於CMOS 40奈米製造技術),相對於原有的解決方案,僅使用一個中頻鏈路處理所有的衛星訊號,取得更低的功耗和面積(只考慮節省面積,用環形振盪器產生本振頻率),同時雜訊指數接近原有的設計,而相位雜訊優於既存的設計。這個架構的射頻部分無鏡像訊號抑制功能,而是設計在基頻部分。
高整合度前端晶片降低BOM成本
本文介紹了一個基於低中頻濾波器並採用CMOS 65奈米技術製造的低功耗L1/E1/G1/B1 GPS/Galileo/GLONASS/北斗2導航衛星系統類比射頻前端,支援多數最常用的TCXO頻率。該產品有很高的整合度,從而能夠降低物料清單(Bill of Material, BOM),同時為客戶保留設計靈活性(多個前端參數可透過串列周邊介面匯流排設置)。當晶片全功能工作時,即GPS/Galileo和GLONASS/北斗2兩個鏈路都運行時,在1.2伏特電源電壓下,功耗大約23毫瓦(在GPS/Galileo模式下17.4毫瓦)。
除此之外,還簡要介紹了研發和定性晶片的測量結果,並與其他的商用射頻前端產品對比。這款射頻前端可以在同一顆晶片上整合性能略加修改的基頻接收器,例如STA8089/STA8090 Teseo III(但是需要採用55奈米製程)。
(本文作者包括Gaetano Rivela/Pietro Scavini/Daniele Grasso/Maria Gabriella Castro/Antonino Calcagno/Giuseppe Avellone/Amedeo Di Mauro/Nunzio Micalizzi/Salvatore Scaccianoce,皆任職於意法半導體)