當我們在使用車內的衛星導航設備時,都曾遇到過問題。不論是原廠配備還是售後市場的裝置,在使用時都有其限制。舉例來說,最明顯的是當汽車行經高樓林立的都會區時,導航裝置的準確度就會大幅下降。在這些所謂「都市叢林」的環境中,使用者通常會經歷到全球導航衛星系統(GNSS)衛星訊號不良以及受到干擾的狀況,但這時卻偏偏是最迫切需要準確、可靠導航服務的時候!高聳的建築物也會反射GNSS訊號,導致準確度下降。另一種常見的情況是,當車子通過隧道時會失去導航資料,在駛出隧道後,還需要一段時間才能重新取得正確的定位。
不過,近來GNSS的創新,已經開始橫掃汽車市場。這些創新設計剛開始只出現在頂級房車中,這個概念稱為汽車慣性導航(Automotive Dead Reckoning, ADR),亦即把GNSS資料與直接從安裝在汽車或輪胎的感測器收集到的位置資訊結合在一起。然後,利用簡單的慣性導航技術,目前的位置便能夠根據相對於上一次GNSS的定位訊息計算出來。由於此設計方式涉及與汽車自有資料網路的高度整合,因此只能在原廠生產時才能配備。
為了提供相近於慣性導航、且比只使用GNSS還高的效能,但又不需要與汽車網路有任何的連結,因此就有無連線慣性導航(Untethered Dead Reckoning, UDR)技術的出現。它的運作方式是透過結合GNSS資料以及慣性感測資料,如圖1所示。
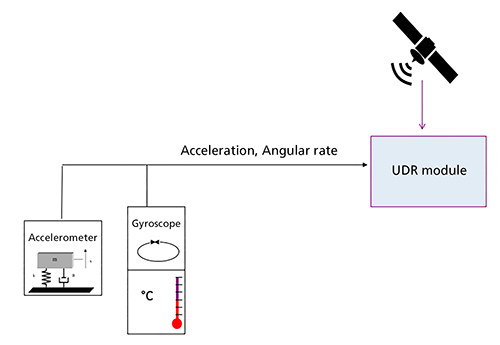 |
| 圖1 無連線慣性導航的基本概念 |
微機電系統(MEMS)加速計與MEMS陀螺儀可用來提供正確的角度與加速力量測量,這些資料再與GNSS資料結合,便能在GNSS訊號受到干擾或不可靠時,提供即時的位置定位。舉例來說,當汽車停在數層的停車塔或地下室停車場時,透過儲存汽車的最後一個已知位置,便能在汽車重新啟動時,立即恢復正常的導航功能。UDR能實現定位準確度的另一個例子是,在被高聳大樓圍繞的都會區中,如圖2所示。
圖2所顯示的測試結果為GNSS與UDR的相對準確度,這是以利用安裝在測試車輛擋風玻璃上的天線進行導航。在測試中,UDR的定位準確度比僅利用GNSS高了三倍之多。為了進一步展現UDR在訊號不良情況下的能力,我們進行了另一項測試。這一次,天線是放在汽車的底部,也就是儀表板的下方。結果可從圖3中看出來。雖然其相對的定位準確度遜於把天線安裝在擋風玻璃或儀表板上,UDR的定位準確度仍然高出三倍。所以,單靠GNSS顯然是不可能完成導航任務的。
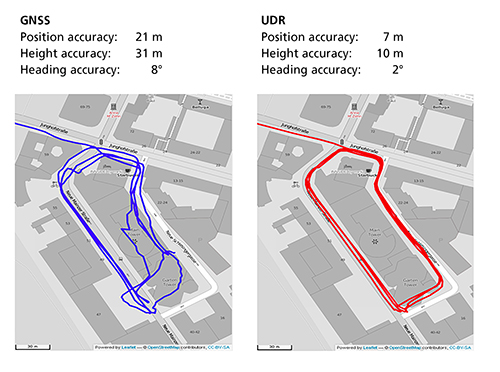 |
| 圖2 相較於UDR導航,GNSS只能利用安裝在擋風玻璃上的天線 進行導航 |
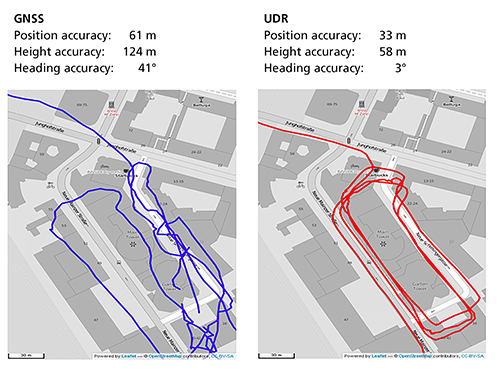 |
| 圖3 當把天線安裝在汽車底部時,GNSS的準確度明顯比UDR遜色 |
本文主要是採用u-blox的UDR模組NEO-M8U來進行上述兩個測試。這款GNSS模組在封裝中內建了3D慣性感測器。它可以支援多重的GNSS衛星接收,包括GPS、GLONASS、北斗以及伽利略。另一款更精巧的UDR模組EVA-M8E,可提供相同的功能性,但需要外接的陀螺儀與加速計感測器,才能實現高整合度的設計。
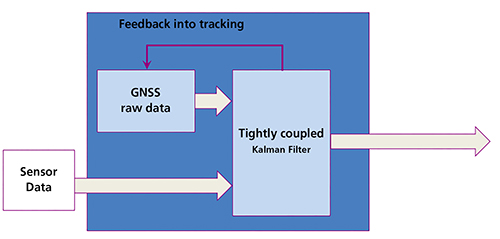 |
| 圖4 利用u-blox的NEO-M8模組實現UDR設計 |
像NEO-M8U這樣可提供完全整合的UDR模組設計,有助於實現最佳的定位準確度。圖4為NEO-M8的設計,透過與卡爾曼過濾器(Kalman Filter)的緊密耦合,可回饋追蹤的準確度資訊至GNSS模組。卡爾曼過濾器亦稱為線性二次估計演算法,可根據一系列的量測值來估計車輛的位置,並提供比僅依賴單一位置量測更準確的估算。透過此方式,並藉由以不同的方式來權重每個GNSS與感測器的訊號,便能取得最高的3D準確度。當在都市叢林中進行導航時,增加來自一個或兩個衛星的資料,能進一步提升慣性導航定位的準確度。相較之下,若不採用此方式,導航的準確度會非常差,甚至有可能根本無法定位。
UDR技術的另一個重點是,它能提供定位資料的高刷新率,或是即時的高導航率(High Navigation Rate, HNR)輸出。當只依賴GNSS訊號時,位置的計算必然會有顯著的延遲。通常,在大量市場中採用的GNSS系統,最高可允許每秒十次的位置定位,也就是刷新率為10Hz。這能反應出當衛星資料被擷取時車輛的所在位置。UDR可使刷新率倍增至20Hz,大幅提升了導航率。
圖5所示為僅利用GNSS與UDR解決方案對於導航延遲的影響比較。UDR係利用感測器資料來與接收到的GNSS訊號互補。其延遲最低為幾微秒,這對於像是防撞系統等安全性應用來說非常重要,因為這類應用是以V2X基礎架構與車輛彼此之間的位置為根據。對V2X應用而言,低延遲與高導航率是絕對必要的,才能在警示情況下達到所需的快速反應。
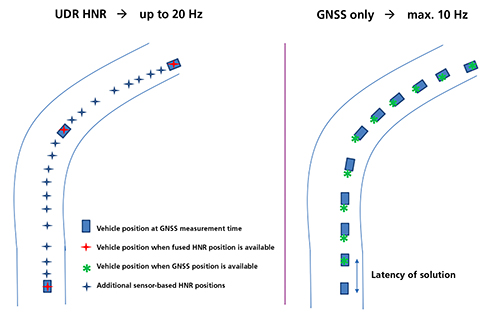 |
| 圖5 GNSS與UDR技術的即時高導航率比較 |
使用u-blox的NEO-M8U與EVA-M8E模組時,包含來自三軸陀螺儀、三軸加速計、以及模組溫度感測器的原始感測器資料串流,都能以100Hz的速率取得。這些資料透過UART或I2C相容介面提供給主機應用程式,並能被用來分析駕駛行為、支援按里程付費(Pay-as-you-drive)保險、或是肇事鑑定等應用。
進行UDR設計時,汽車電子工程師應審慎地研究UDR模組以及開發工具的功能,以協助其原型製作流程並加速產品上市時程。重要的設計考量包括:操作溫度範圍、是否符合AEC-Q100等汽車品質標準認證、並遵循ISO16750標準,以確保適用於道路車輛的極端運作環境中。此外,為了支援初始的概念原型,需要利用評估套件或參考設計,才能夠快速地進行試做,例如,不同的天線位置、評估不同的模組功能性,並檢視整體的GNSS與感測器效能。
無連線慣性導航可提供過去不可能實現的汽車等級導航準確度。不管是行經隧道、高樓林立的都會區、或是停放在多樓層的停車塔中,UDR都能提供不中斷的導航體驗,無需連接至汽車的自有網路,而且能夠在短時間完全失去訊號的情況下繼續導航。
(本文作者為u-blox市場開發經理)