伴隨台灣科技及經濟的快速成長,民眾對擁有車的需求更為強烈,預計全球汽車保有量將由2010年之八億輛成長至2030年之十六億輛,加上全球城市化之趨勢,將會致使行車環境更趨惡化,交通事故造成之傷亡人數居高不下。
根據世界衛生組織(World Health Organization, WHO)統計,全球每年因交通事故造成的死傷人數超過一百五十萬人,每日約三千四百人死於交通意外。以台灣來看,每年因交通事故死亡人數均在兩千人以上,且事故發生地點以交叉路口占五成以上,而肇事原因九成以上與駕駛行為有關,如未注意車輛前方狀態、轉彎不當、未依規定減速、違規超車,以及未保持安全距離等因素。
有鑑於事故傷亡所造成社會成本的提高,迫使美歐等各國政府機構及汽車產業積極投入車載資通訊(Telematics)技術之開發與車間(Vehicle-to-Vehicle, V2V)安全性應用場域之試煉,美歐日政府協同汽車產業明訂時間表,規劃及投資下世代智慧行車系統,以共同邁向安全與零事故之行車環境新願景。
車載資通訊服務融合資訊、通訊、汽車電子及數位內容科技等多重應用,以滿足行車環境之各項需求,如安全、效率及舒適等智慧化服務。
在車載資通訊所提供之安全性應用中,車用環境無線存取(WAVE)/專用短程通訊(DSRC)能提供快速移動車輛多頻道的運作架構,可使車上設備(On-Board Unit, OBU)與路側設備(Road-Side Unit, RSU)能快速的在行車環境中建立車內通訊(Intra-vehicle)、車對車間通訊、車輛對路側設施間通訊(Vehicle-to-Roadside, V2R),以及車輛對基礎建設間通訊(Vehicle-to-Infrastructure, V2I)等應用情境,並結合其他無線網路技術(如3G/4G、LTE、Wi-Fi、藍牙等),達到掌握即時路況(如事故或塞車等資訊)及行車安全目的。
推動V2V安全性應用 歐美各國政策因地制宜
事實上,目前全球主要汽車市場北美、歐洲與日本,政府無不積極投入智慧交通系統(Intelligent Transport System, ITS)之發展,包括美國IntelliDriveSM、歐洲EasyWay與日本Smartway。
鑑於各國交通環境、地理特性與文化之差異,策略遂有因地制宜考量,但規劃思維一致,希冀透過資通訊技術、感測技術與自動化技術,來改善車輛、道路與基礎設施等外在條件,藉以塑造出一個高效率運作系統,來滿足各種用路人需要。
當各國政府推動ITS衍生Telemaitcs需求外,各大車廠與獨立服務業者亦陸續投入相關服務應用開發,提供以安全、導航和節能等方向的Telematics服務。表1為全球主要車廠提供之Telematics服務應用。
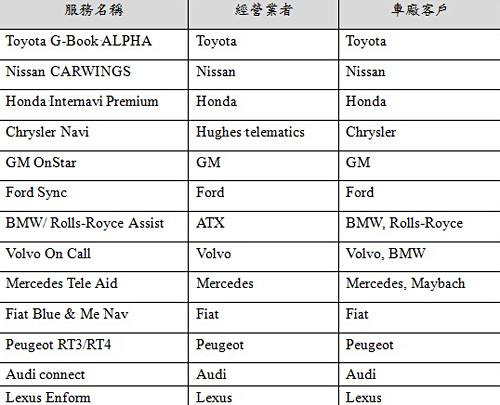 |
| 表1 全球主要車廠提供之Telematics服務應用 |
在各車廠中,目前以GM、豐田(Toyota)與BMW投入最多,三家車廠至今分別投入超過20億美元、15億美元與10億美元於相關領域之發展。隨著資通訊技術演進及ITS基礎建設布建等外部驅動力帶動,加上各國政府、各大車廠積極推動下,如何於多元聯網型態中,整合多方資訊及支援新型V2V安全性應用服務,同時兼顧駕駛行車安全,將成為未來聯網智慧車輛之重要挑戰。
近年來聯網車輛(Connected Vehicles)在ITS發展扮演重要角色,透過快速發展的網路技術達到V2V、V2R、車對人(Vehicle-to-Pedestrain)等連結,提供即時安全、便捷和舒適性服務。
另一方面,智慧交通進一步融合聯網車輛技術、感測技術、巨量資料與智慧聯網等科技發展,提供車輛、用路人與交通管理者智慧化的整合服務,結合創新營運模式可帶動交通產業發展與轉型,提高民眾之行的智慧化。以下就近期國際在V2V安全性應用發展趨勢進行說明。
2014年為國際V2V車間通訊發展元年,美國交通部於2014年2月3日宣布朝向V2V強制立法,並啟動新一期的發展藍圖,如圖1所示。美國交通部規劃於2017年完成應用發展與場域建置,並在2020年完成全國性的試營運,發展重點將從基礎通訊設備驗證,提升到完整的應用開發與系統建置,屆時將強制所有新出廠的小型車輛裝載V2V通訊設備。
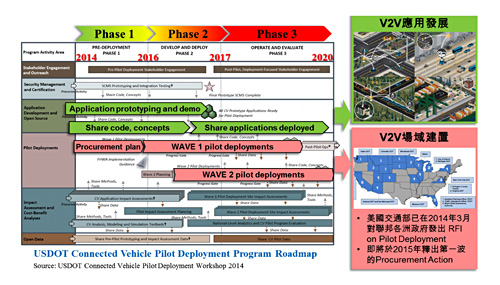 |
| 圖1 美國交通部Connected Vehicle Pilot Deployment計畫發展藍圖 |
此外,美國交通部更於2014年8月18日進一步釋出Advance Notice of Proposed Rulemaking(ANPRM)正式啟動立法程序,市場預期將於2017年1月美國總統歐巴馬任期結束前送交國會審議通過,並於強制實施前給予汽車產業18個月的準備時間。
有別於美國的立法動作,歐洲於2015年起將啟動一連串的Cooperative ITS(C-ITS)建置計畫,逐步擴大範圍與應用類型、吸引參與者加入。
2014年2月14日,歐洲標準組織ETSI與CEN宣布完成第一階段的C-ITS標準制定,支援2015年之建置需求。C-ITS標準第二階段制定也於2014年4月啟動,將朝應用與系統化發展。由歐盟各國政府、研究機構、產業組成的Amsterdam Group,也承諾於2015年啟動一連串的聯合建置案,打造泛歐盟區C-ITS環境。
2015年起荷蘭、德國、奧地利政府將共同於跨國公路上進行C-ITS布建。其他新興國家,如韓國、中國及新加坡等皆積極發展相關應用技術,並進行國際結盟,且國外廠商主導國際車載相關標準規格。
ASD具四大安全應用
美國交通部與八大車廠聯盟(Crash Avoidance Metrics Partnership, CAMP)在Safety Pilot計畫中共同定義六項V2V重點安全應用,並於2012年所舉辦的Driver Acceptance Clinics進行駕駛的訪查,如圖2所示。
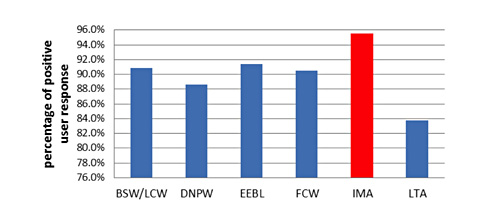 |
| 圖2 2012年Safety Pilot計畫進行的Driver Acceptance Clinics應用接受度調查 |
其中95%的駕駛認為路口駕駛輔助(Intersection Movement Assist, IMA)為最重要的應用。透過V2V的方式警示路口來車,駕駛能進而避免因視線阻隔而造成的事故與傷亡;其他安全應用分別為Extended Electronic Brake Light(EEBL)、Blind Spot Warning(BSW)、Forwarding Collision Warning(FCW)、Do Not Pass Warning(DNPW)、Left Turn Assist(LTA)。
後續,美國於Connected Vehicle Research計畫中對於V2V安全警示系統,致力於後裝安全裝置(Aftermarket Safety Device, ASD)標案中四種應用的研究,須要提供駕駛快速的反應時間與低延遲的傳輸。因此,WAVE/DSRC為合適的通訊技術(其特性在兩輛車相距100公尺範圍內,單向傳輸延遲維持在0.002秒內)。據了解,ASD具備四種安全性應用:
協同式十字路口防撞系統(Cooperative Intersection Collision Avoidance System- Violation, CICAS-V)
此應用概念與路口駕駛輔助應用相似,主要目的為協助駕駛避免於路口發生碰撞,並警告即將違反交通號誌或停車標誌的駕駛。
協同式意指其系統必須結合路側基礎建設(如路側單元、交通號誌)與車內車機設備兩種元件共同運作。當裝有CICAS-V設備的車子接近裝設有CICAS-V設備的十字路口,其車上設備可接收到含有路口地理位置、全球衛星定位系統(GPS)差分校正資訊與號誌狀態(如綠燈剩餘秒數)的訊息。
車內OBU設備透過所接收的訊息判斷駕駛是否處於危險狀態並提醒駕駛。駕駛可透過車內螢幕預先得知路口資訊(如號誌剩餘秒數),此資訊做為通過路口時加減速的參考依據。
前方碰撞警示(Forward Collision Warning, FCW)
此應用的主要目的為協助並警告後方駕駛,於直行道路上避免與前方車輛發生碰撞。
後方車輛的OBU接收來自前方其他車輛的基本安全訊息(如座標位置、車速、方向、偏航速率與加速度),透過所接收到的資訊可與自身車輛的位置、車速與道路資訊(如地圖資料)比對並判斷是否會與前方車輛發生碰撞,其判斷結果將透過螢幕顯示或警示音提醒駕駛。
電子煞車燈警示(Electronic Emergency Brake Light, EEBL)
此應用適用於當前方車輛發生緊急煞車,特別是後方車輛被前方大型車輛(卡車或聯結車)遮蔽視線,前方車輛將其自身的電子煞車資訊透過廣播的方式傳遞給後方的車輛,以提醒後方車輛駕駛人留意,避免發生連環車禍。
針對前方車輛發出電子煞車資訊的時機點則是依據車速變化或煞車訊號,其煞車資訊也可與適應性巡航控制系統(Adaptive Cruise Control System, ACCS)相結合。當後方的車輛接收到緊急煞車訊息,則透過車內螢幕顯示警示畫面或發出警示音提醒駕駛。
彎道車速警示(Curve Speed Warning, CSW)
此應用的主要目的為協助駕駛於彎道時,特別是山區道路地形,給予適當的車速建議。當車輛行駛至彎道前,駕駛可事先接收到由RSU路側裝置所發送的資訊(如彎道的位置、彎道速限、彎道的坡度與路面狀況(如積水、油滯),依據車內螢幕所顯示的資訊判斷是否需減速並預先被警示。
路側設備輔助可彌補GPS誤差問題
以上應用在V2V安全性應用技術規格的範疇下,要求每一輛汽車配備車機與GPS接收器,行駛中的車輛經由全球定位系統獲得本身經緯度位置、行駛速度、航行方向與時間,再藉由車機週期性地廣播該即時資訊,給周遭行駛車輛,降低車禍與事故之發生。
然而不幸的是,目前市售的GPS精準度不足,容易造成距離的判斷誤差;一般而言,車用導航機或手機,其定位誤差大約5∼15公尺;不過於空曠處,其誤差較小,接近5公尺。但如果以都會區來看,因高樓林立會遮蔽GPS衛星的訊號,GPS定位準精度誤差較大,約達15公尺;再者,一般道路其車道寬度約1.5個車身,約4公尺,故其定位誤差可以橫跨兩到四個車道。
根據交通部運輸研究所於民國101年事故通計,台灣路口車禍亦為最主要的交通事故類型,約占五成以上,過半事故與重大傷亡發生在路口區域。
因此透過車間通訊技術可提升行車安全,其通訊技術可區分為沒有路側設備輔助車間通訊及有路側設備輔助兩大類。前者利用車子本身通訊設備(如工研院自行研發之通訊設備,簡稱ITRI WAVE/DSRC Communication Unit(IWCU))不斷傳送自身車輛的訊息,內容含車速、方向、經緯度與車輛特徵等給周遭通訊範圍內的所有車輛。
接收到訊息的移動車輛利用自身GPS取得車輛本身位置、方向和經緯度,計算出對方車輛的距離與方位,並將警示即時顯示在平板上。V2V安全性應用系統使用5.9GHz DSRC週期性廣播Basic Safety Message(BSM)封包。
該封包含有本身車輛之ID、經度、緯度、車速、方向等資訊給周遭鄰近的車輛,此外,也負責接收周遭鄰車的資訊,並送給IWCU處理。IWCU同時把所有車輛之彼此相對位置、行駛速度、方向等車輛資訊顯示在平板上,此種方法適用於大量裝設OBU設備的車輛,誤差完全由GPS精準度而定。
有路側設備助的防碰撞系統,可適用於台灣複雜的道路地形,以改善GPS精準度與遮蔽的問題。如圖3所示,路側設備可結合雷達測距設備、影像辨識設備、交通號誌控制器等設備。
 |
| 圖3 結合多元路側設備之路口防碰撞系統架構圖 |
藉由描頻率20Hz的雷達負責掃描不同方向車道上的物體,並取得雷達到物體的橫向與直向距離及橫向與直向物體的移動速度及物體長度,路側設備定期傳送給區域範圍內之車輛;此外,藉由影像辨識設備可彌補雷達設備僅能提供之物體長度資訊不足之處。
影像辨識負責判別辨識區域內的物體是否具有危險性,路側設備會不定期傳送給區域範圍內之車輛緊急狀況之警示;並於十字路口可藉由整合交通號誌控制器,取得路口各方向時相及剩餘秒數等號誌資訊,再由路側設備定期傳送SPAT(Signal Phase and Timing)等訊息給周遭車輛。接收到訊息的移動車輛會利用自身GPS取得車輛本身位置、方向和經緯度,計算出路側設備提供之區域內車輛的相對位置與距離,並即時繪製在平板上,以警示駕駛。
事實上,無論有無路側設備輔助,當移動車輛接收到來自周遭車輛或是路側設備的訊息,車上IWCU也會將周遭車輛經緯度座標轉換為以駕駛的視角為正北方的坐標系,猶如導航模式般,當收到的訊息判斷出有車輛即將從死角進入駕駛視野,系統將計算其相對位置,根據其速度及行進方向投影於駕駛前方,並一併顯示即將出現的秒數及車輛其他相關資訊,如車色及車長等車輛資訊,如圖4所示。
 |
| 圖4 結合車間DSRC通訊於行車安全應用示意圖 |
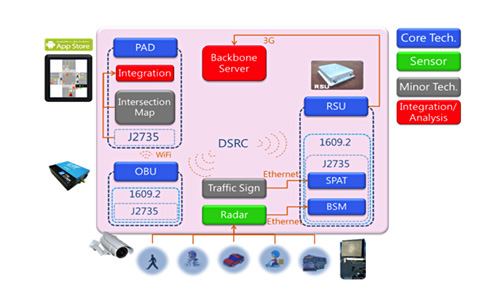
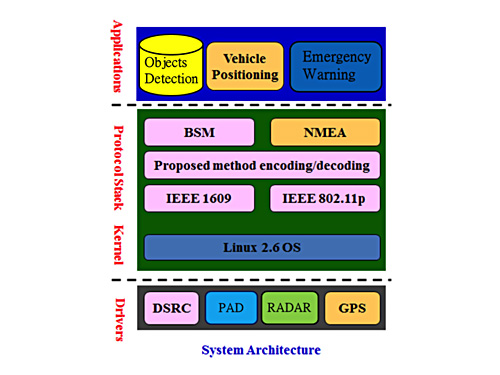
圖5為工研院資通所所研發之路口防碰撞安全應用系統軟硬體協定功能架構圖,主要分成三大部分,分別為底層硬體、中層作業系統核心、上層應用程式開發。
在底層硬體驅動介接中,該系統與五個路側裝置連接,分別用來做為車間通訊橋接之具備5.9GHz DSRC之IWCU、判斷車道上物體位置、速度與長度的雷達設備、車輛定位使用的全球定位系統、駕駛及乘客使用者端顯示器以及交通號誌控制器。也就是說,該層主要負責設備間的通訊訊息介接。
 |
| 圖5 路口防碰撞安全應用系統架構 |
中層作業系統核心目前為嵌入式Linux 2.6作業系統,其中有IEEE 802.11p、IEEE 1609、SAE J2735軟體通訊協定,負責5.9GHz DSRC週期廣播與接收車輛本身資訊;另外National Marine Electronics Association(NMEA)軟體協定負責解析經由GPS得知車輛本身的經度、緯度、高度與行駛方向等資訊。
上層應用程式開發處理不同方向來車位置定位演算、物體偵測判斷、危險層級判斷機制及警告顯示模組。
車載資通訊技術結合多元感測設備已經是下世代車載資通訊的主要潮流。未來人、車、路與環境中之終端設備、服務中心、服務設施與路側設備等將透過異質網路整合,形成網網相連狀態,使分散的資訊得以融合,促使用車人與車輛及周遭環境之互動。
全球汽車產業在不斷提升運作效率的同時,透過更先進的電子科技來提升汽車的價值與差異化已是主要的途徑。透過車間通訊技術,將帶給駕駛與乘客更舒適、更便利、更安全的全新體驗與感受。
透過車間通訊強化行車安全,將從過去由駕駛自行判斷危險,並採取行動的被動式安全,逐漸的將朝向主動式安全發展,讓智慧車輛透過WAVE/DSRC達成V2V或V2R通訊,並結合車輛控制以及資訊運算處理,進而達到更短的反應時間與行車零事故之目標。
(本文作者皆任職於工研院資通所)