工業4.0推動現代工廠,其中10BASE-T1L感測器連接到其他端點的企業網路,甚至延伸至工廠各個角落,實踐智慧互聯工廠,進而減少計畫外停機,更良好地利用設備和其他資產,以及更有效地部署人員。
在狀態監測(Condition-Based Monitoring, CbM)感測器研發方面,單對乙太網路(SPE)或10BASE-T1L提供許多明顯優於標準乙太網路的優勢,其中包括縮小感測器尺寸、降低複雜度、以及低成本的布線選項。本文將探討如何為CbM感測器設計精巧型共用電力與資料介面。另外還探討電源供應器與機構的設計、微機電系統感測器的選擇,及建構完整感測器解決方案涉及的軟體設計。
新型SPE或10BASE-T1L是國際電機電子工程師協會制定的實體層標準,針對各種CbM應用交換資產健康情資訊息提供新的連結解決方案。SPE提供一種共用電力與高頻寬的資料架構,透過低成本的雙線電纜進行10Mbps的資料傳輸與供電,最遠可傳遞至1,000公尺。有廠商Analog Devices推出10BASE-T1L MAC-PHY元件ADIN1110,其為單對乙太網路收發器內嵌媒體存取控制元件,透過簡單的SPI匯流排和嵌入式微控制器傳遞訊息,藉以縮減感測器的功耗與韌體開發時間。
如何設計共用資料與電源通訊介面
數據線供電(PoDL)透過一條雙絞線與電感電容網路傳遞電力與資料,如圖1所示。高頻寬資料經過一連串電容傳入資料纜線,這些電容負責保護10BASE-T1L PHY元件免於遭受DC匯流排電壓的破壞,如圖1(a)所示。
 圖1 共用電源與資料纜線(PoDL)的基本原理
圖1 共用電源與資料纜線(PoDL)的基本原理
圖1顯示一個電源連到受電設備(PSE)控制器,中間經過一個連到資料纜線的耦合電感。24VDC電源向AC資料匯流排傳送偏移電壓,如圖1(b)所示。在圖1(c)中,電流線路為PSE與受電設備(PD)之間的IPWR,系統會使用CbM感測器節點上的耦合電感從纜線擷取電力。 圖1顯示耦合電感與串聯電容,兩者是PoDL工作最基本的元件。在增進強固性與容錯性方面,還需要其他額外的元件。
由於PoDL耦合電感屬於非理想元件,因此會進行一些差動轉共模的轉換程序。這類共模雜訊會降低訊號品質。選擇讓纜線連接器連上共模扼流圈有助於抑制這類非理想行為,以及保護設計方案免於遭受來自纜線共模雜訊的影響。另外必須檢驗共模扼流圈的載流量與直流電阻以確保它們能為感測器供應足夠的電力。
為防範電纜極性接反造成破壞,像是PSE PHY的24VDC電壓接到PD PHY的0VDC電壓,建議使用橋接整流二極體。為增進EMC強固性,應在工作電壓線路裝上TVS二極體而不是需要24VDC。另外如果感測器硬體設計規模比較大,還可使用額外的EMC元件,像是訊號線路上的高電壓電容。
使用這些元件設計小型PoDL電路頗為困難,但幸運的是,大多數廠商在整流二極體、TVS二極體,以及被動元件方面都有極小的尺寸。一般而言,應選用電容極低的元件藉此盡量壓低訊號失真。耦合電感與電容值方面,建議分別為220µH與220nF,但在模擬或測試時可採用稍高的值,以因應設計餘裕的需要。在小型感測器設計PoDL介面的元件選擇,包括共模扼流圈、瞬態電壓抑制器、耦合電感(功率型)、橋接整流二極體和串聯電容。而耦合電感的額定電流必須符合或超越遠端供電MEMS感測器節點的總電流要求。
針對檢驗PoDL電路的方法,國際電機電子工程師協會(IEEE)為10BASE-T1L制定的802.3cg-2019標準明定實體層元件必須達到的電氣規格,包括電壓值、時脈抖動、功率頻譜密度、回波損耗,及訊號下調(衰減)。PoDL電路會影響通訊頻道,而回波損耗與訊號衰減(或下調)則是其中兩項關鍵因素。回波損耗是衡量網路中可能發生的訊號反射,這些反射來自纜線鏈路上所有位置的阻抗不匹配。回波損耗單位為分貝,在高資料傳輸率或10BASE-T1L採用的長纜線(1,700公尺)時特別重要。
打造低雜訊電源供應器
有線式狀態監測感測器在雜訊免疫力方面的規範相當嚴苛。包括鐵路、自動化、重工業(像是紙漿與製紙)等產業的狀態監測,振動感測器解決方案的雜訊必須低於1mV的門檻,以避免觸發資料擷取/控制器的誤報振動。這意謂電源供應器的設計輸出到電路(MEMS訊號鏈)雜訊(低輸出漣波)必須壓至極低。此外,MEMS感測器的電源供應器設計亦必須對耦合至共用電源與資料線的雜訊有免疫力(高PSRR拒斥比)。
想要確保MEMS感測器能偵測到極微幅的振動,需要極低雜訊的電源。在正常運作下,MEMS電源供應器必須符合甚至超越這個規範,才能避免減損感測器的效能。
有線式狀態監測感測器通常使用24VDC至30VDC的電源供電,需要用到具有高輸入範圍的高效率降壓轉換器以降低功率消耗以及改進感測器的長期可靠度。由於有非理想電容負載,因此降壓轉換器電壓漣波可能達到數十mV,不適合用來為3V/5V MEMS感測器供電。使用共模扼流圈或降壓電容(Bulk Capacitance)可壓低降壓輸出漣波電壓,不過在降壓元件輸出端還需要接上超低雜訊LDO低壓降穩壓器,以確保為MEMS感測器供應電力的雜訊僅有µV等級。
整合數位硬體設計與機械外殼
鋼或鋁材質外殼用來裝載MEMS振動感測器並穩固連接到受監控的資產,同時提供防水與防塵(IP67)功能。對於振動感測器而言,外殼的自然頻率必須大於MEMS感測器所量測振動負載的自然頻率。
圖2顯示MEMS元件ADXL1002的頻率響應圖(Frequency Response)。MEMS元件在3dB下的頻寬為11kHz,響應頻率為21kHz。用來承裝MEMS元件的保護外殼在靈敏軸向(Axis of Sensitivity)上的第一自然頻率(First natural Frequency)必須大於21kHz。同樣,在設計三軸感測器時,必須分析機殼外殼在垂直方向與徑向的自然頻率。
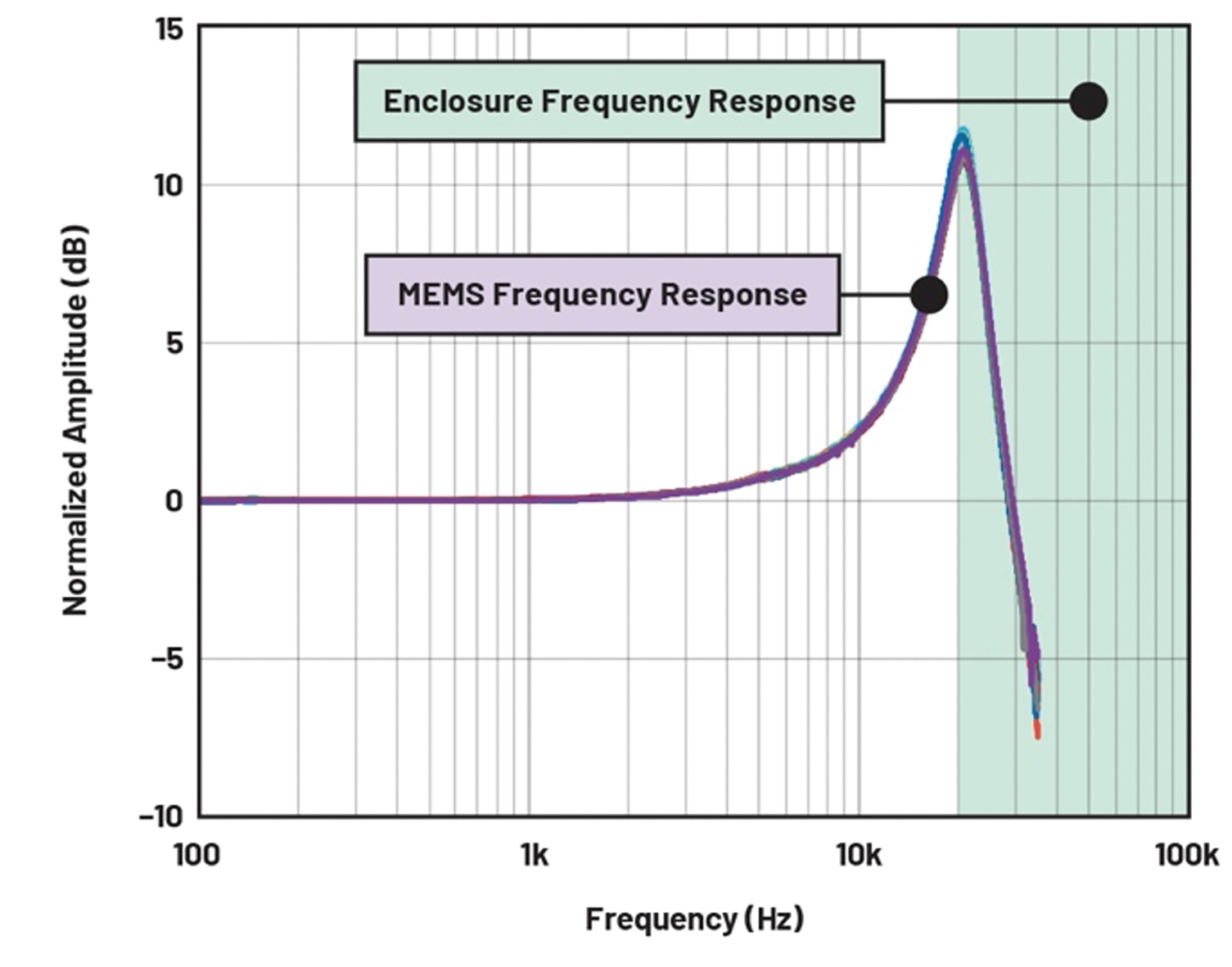 圖2 MEMS與機械外殼頻率響應的設計目標
圖2 MEMS與機械外殼頻率響應的設計目標
感測器原型在模態振動器(Modal Shakers)上進行測試,這部機器提供受控環境,模擬使用者設定的振動測試值與橫擺(Sweep Across)頻率。感測器頻率響應的測試結果應接近如圖2所示的MEMS感測器資訊。
模態分析
模態分析(Modal Analysis)是一項常用的技巧,提供外殼振動特性的詳盡訊息。模態分析可提供設計案的自然頻率與正常模態(相對變型)。運用ANSYS或類似程式的有限元素方法(FEM)可用來模擬結構的模態響應(Modal Response),協助優化設計與減少感測器原型設計疊代的次數。
公式1是一個單自由度系統進行模態分析後求得控制方程式的簡化結果。自然頻率和外殼設計的質量矩陣(M)以及剛性矩陣(K)有關係。公式1提供一個簡單直覺的方法來評估設計。當縮減感測器外殼的高度,剛性就會提高而質量會降低,因此自然頻率就會提高。此外,當你提高外殼的高度,剛性就會降低而質量會增加,導致自然頻率降低。
大多數設計有多個自由度,有些設計的自由度甚至多達數百個。使用有限元素方法能快速計算公式1,若以手算則會非常費時。

在使用ANSYS模態進行模擬時,解算器(Solver)會輸出自然頻率以及模態參與因子(MPF)。MPF用來判斷哪個自然頻率對你的設計最重要。相對偏高的MPF意謂某個特定頻率會成為設計上的麻煩。
選擇適合MEMS振動感測器
儘管振動感測器的分類還沒有制定官方標準,不過可以按照其有效解析度進行分類,如圖3,可看出MEMS加速計覆蓋的區域遠小於壓電式感測器的覆蓋面。MEMS加速計設計用來支援許多特定用途,像是防撞氣囊的撞擊偵測、車輛的傾翻偵測、機械臂定位、平台穩定化、精準傾斜偵測等。MEMS元件製造商在數年前才開發出性能夠好的產品足以和IEPE振動感測器競爭,因此這項技術仍處於發展初期,在有線式狀態監測環境中僅覆蓋較小的區域,如圖3左側所示。隨著越來越多MEMS廠商投資發展狀態監測振動感測器解決方案,這類產品估計在未來幾年還會持續成長。
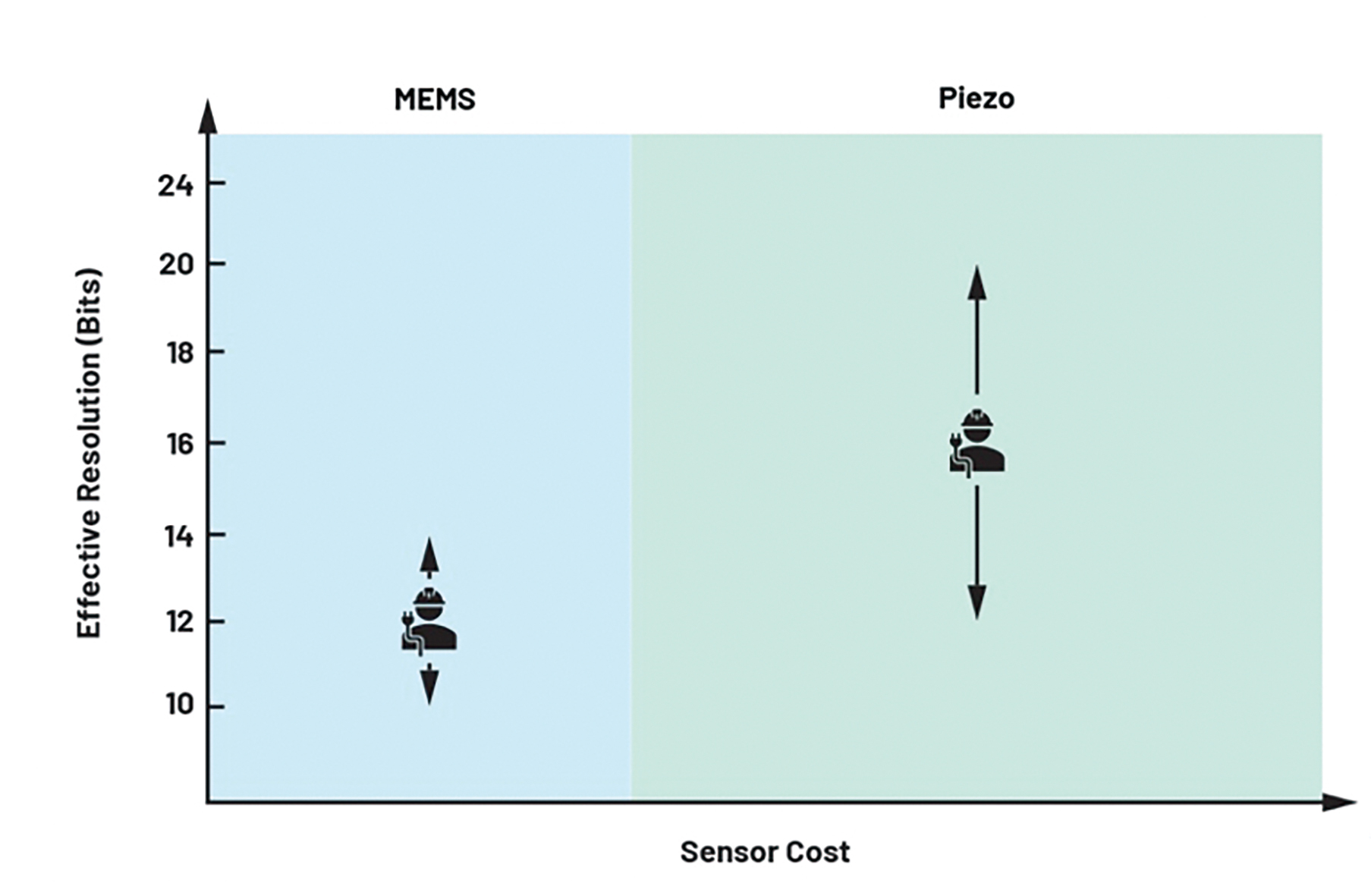 圖3 MEMS與壓電式感測器在有線應用的覆蓋區域
圖3 MEMS與壓電式感測器在有線應用的覆蓋區域
MEMS感測器具備許多優勢,而能在振動感測器領域發揮顛覆性影響。舉例來說,市面上大多數MEMS感測器具有三個感測軸向、整合ADC、數位濾波器、優異線性度、低成本、重量低、體積遠小於壓電式或IEPE/ICP感測器。雖然大多數關鍵資產仍將繼續採用IEPE感測器,但維護與設施管理員希望也能從重要性較低的資產取得更深入的洞悉訊息,以發揮更好的生產力、效率、以及永續性 – 這意謂必須縮短非計畫的停機時間,以及延長資產的壽期。成本與效能更低的感測器,不論是MEMS或IEPE,都將用在這類情境,然而這也引發出一個問題:具備更好雜訊與頻寬性能的單軸IEPE感測器,是否永遠勝過三軸式MEMS感測器?
三軸MEMS加速計在發展初期就進行全面的測試,藉以找出性能更好單軸甚至雙軸IEPE振動感測器也無法找到的缺陷,如表1所示。像是轉軸彎曲、轉子偏離軸心、軸承問題、突出轉子(Cocked Rotor)等缺陷,都無法透過單軸振動感測器絕對確定的情況下偵測到,除非在裝配之前預先做一些工作以瞭解特定異常狀況。在只有單軸振動感測器的情況,需要用到像是偵測馬達電流或磁場的狀態監測感測器,才能較高信心下找出特定類型的故障。
擁有優異雜訊與頻寬性能的單軸感測器和三軸感測元件之間存在取捨關係,這些額外的軸向可抒解裝配位置的各種問題,因為不僅能偵測到包括垂直、水平、以及軸向的振動,還能對資產的運行狀況有更深入的洞悉。根據表1顯示的結果,就算擁有優異的雜訊與頻寬性能,相較於三軸MEMS感測器,仍能運用單軸感測器辨識出大多數故障並達到極高的信心水準。

掌握感測器合適部署單對乙太網路狀態監測
可部署的單對乙太網路狀態監測感測器設計用來容納一個振動感測器,不過系統結構允許裝進多種類型的感測器,像是溫度、壓力、聲響、位置等類比或數位輸出格式的元件,僅須微幅修改微控制器韌體就能使用。振動感測器除了必須精巧,還須支援數位輸出(SPI或I2C)與高整合度(放大器、ADC),藉以因應可部署單對乙太網路狀態監測感測器在尺寸與效能方面的要求。
選用低雜訊三軸感測器取代雜訊更低、頻寬更高的單軸MEMS感測器,藉此提供更多診斷情資(三個軸向對比一個軸向)以及抒解單軸感測器衍生的裝配難題。下一個關鍵考量因素則是功耗,這裡明顯可看出三軸1kHz頻寬MEMS感測器ADXL357在IP6x模組內部產生的自熱效應(Elf-Heating)比其他感測器來得低,因為MEMS感測器不需要ADC或運算放大器,進而縮減整體解決方案的尺寸與物料清單成本。縮小解決方案的尺寸可確保緊湊的機械外殼以及良好的模態頻率效能,正如模態分析段落所述。
更高效能的單軸式高頻寬(11kHz至23kHz)MEMS感測器,像是最高支援到14位元解析度的ADXL100x系列元件可無縫整合,另外還需要用到外部ADC來維持效能,因為大多數低功耗微控制器僅整合12位元ADC。然而,透過適合的微控制器,重複取樣(Oversampling)與整合降低取樣率(Decimation)等技巧,可將解析度提升到12位元以上,意謂單軸式類比輸出MEMS加速計可整合到現有系統,耗費的工作量會減至最低。另外要注意的是,如果需要13位元以上的解析度,就必須採用類比輸出MEMS或IEPE感測器。
微控制器與軟體架構
圖4顯示一個簡單的振動感測器訊息佇列遙測傳輸(MQTT)架構,以及可部署單對乙太網路狀態監測感測器的高階模塊圖,這個感測器連到PC或Raspberry Pi開發板,如圖5所示。MQTT是物聯網專用的輕量級傳訊協定,讓網路客戶端在低頻寬環境中傳遞遙測資料。MQTT被視為輕量級,因為它的訊息占用的資料碼較少。發布(Publish)與訂閱(Subscribe)訊息傳輸模式適合以最少的資料碼與網路頻寬連結遠端裝置。
 圖4 MQTT簡單發布/訂閱架構
圖4 MQTT簡單發布/訂閱架構
 圖5 可部署單對乙太網路狀態監測感測器模塊圖
圖5 可部署單對乙太網路狀態監測感測器模塊圖
MQTT廣泛用在各產業,包括油氣探勘、汽車、電信、製造業等。發布者會發送訊息,訂閱者則會接受感興趣的訊息。中介者(Broker)會把發布者送出的訊息轉送到訂閱者。某些MQTT中介者會處理數百萬個同時連結的MQTT客戶端,這也是其中一項具吸引力的功能,大量感測器可連到一個SPE裝置,組建出一個感測器資料管線,如圖4所示。發布者與訂閱者都屬於MQTT客戶端,只能和MQTT中介者進行通訊。MQTT客戶端不僅可以是Arduino、Raspberry Pi、ESP32開發板等任何裝置,也可以是Node-RED或MQTTfx之類的應用。 圖5的前四個模塊包含感測器、微控制器、MAC-PHY,以及媒體轉換器。感測器是一個能偵測振動的數位輸出三軸MEMS感測器。任何標準低功耗微控制器都可用來從三軸MEMS感測器讀取資料。此外MAX78000還有額外的優點,除了提供低功耗邊緣AI處理,還內建卷積神經網路(CNN)硬體加速器。
量測到的振動資料會置入MQTT標題,之後透過SPI介面傳送到MAC-PHY。低成本Cortex-M4微控制器可用來執行讀取/寫入,透過SPI介面連到10BASE-T1L MAC-PHY元件,支援不同模式與組態,像是PoDL ON或OFF;T1L Special、Main或Subnode:1V或2.4V。MAC-PHY會把MQTT資料標題轉換成10BASE-T1L格式,透過IP67等級纜線最高可傳至300公尺,使用遮蔽式強固纜線最多可傳至1,700公尺。之後媒體轉換器會把資料從10BASE-T1L 轉換成10BASE-T格式,讓PC或Raspberry Pi能解譯資料,之後再進行處理與顯示。
10BASE-T1L MAC-PHY元件
由於配備整合式MAC介面,單埠10BASE-T1L乙太網路MAC-PHY收發器能透過SPI直接連到各種主控端控制器。SPI通訊頻道讓系統能使用低功耗處理器,不需用到整合MAC,提供最低整體系統層級功耗。且針對部署在建築物、工廠、流程自動化(Process Automation)等環境的邊緣節點感測器與現場儀器設計。這類元件使用1.8或3.3V的單供電軌運行。由於支援1.0V與2.4V工作振動幅度模式(Amplitude Modes of Operations)以及外部終端電阻,能用在各種原生安全環境。可程式化的傳送訊號值、外部終端電阻、以及獨立的接收與發送針腳,這些特色讓該元件適合原生安全應用。
乙太網路在現場或邊緣的願景,是把所有感測器與致動器連到融合式IT/OT網路。要實現這項願景,需要克服許多系統工程挑戰,因為這些感測器在功率與空間方面受到限制。具備充裕內建記憶體功能的低功耗與超低功耗微控制器,在感測器與致動器應用方面,發展出持續成長的市場。但這些處理器大多數都有一個共同點:沒有內建乙太網路MAC元件,不支援MII、RMII、或RGMII媒體獨立(乙太網路)介面。傳統PHY元件無法連到這些處理器/微控制器。
可部署單對乙太網路狀態監測感測器韌體建置,如表2所示。

大多數低成本Cortex-M4微控制器都有足夠記憶體,適合支援這類應用。圖6顯示SPE狀態監測感測器軟體架構,包含多個元素。微控制器可輕易處理作業系統(FreeRTOS)與MQTT函式庫,以及輕量級IP堆疊或lwIP,小型獨立開源TCP/IP協定適合用來降低RAM使用量,還能同時使用全規模TCP協定。
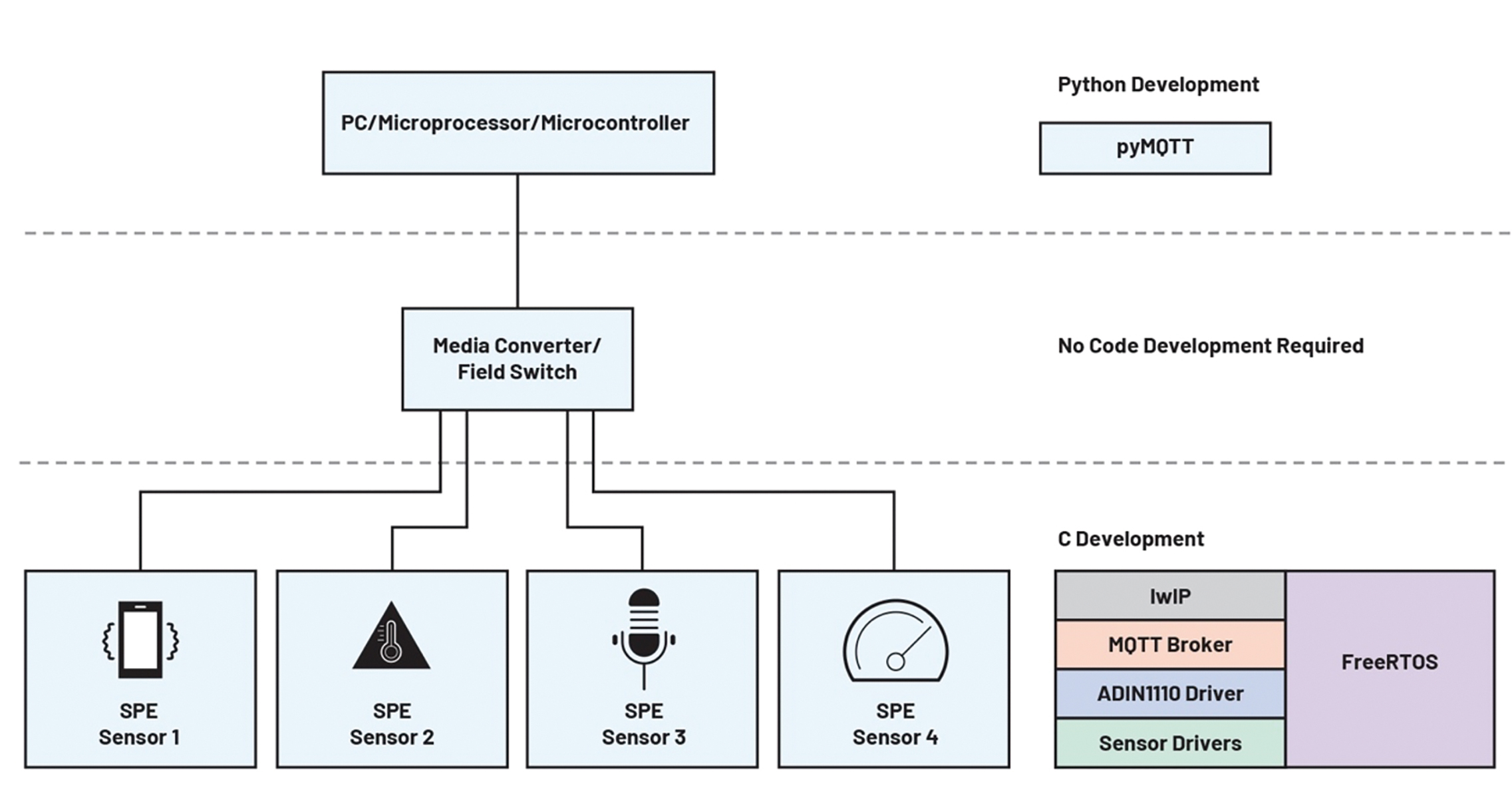 圖6 感測器模塊圖以及每個模塊資料碼的開發需求
圖6 感測器模塊圖以及每個模塊資料碼的開發需求
FreeRTOS提供一個說明文件與支援都相當完備的開源作業系統,讓各界可輕易加入新的程式碼功能模塊。lwIP TCP/IP的目標是提供一個全規模傳輸控制協定(TCP)同時減少資料的使用量,讓lwIP適合用在嵌入式系統,這類系統僅有數十kB的可用RAM空間,以及大約40kB的資料碼ROM空間。此外還有許多附加應用,像是透過MQTT客戶端提供MQTT功能。設定成發布者/訂閱者模式的MQTT模塊提供一種高效率的高速解決方案。ADIN1110驅動器需要先跟位址解析協定(ARP)模塊進行通訊,然後才能和lwIP堆疊通訊,藉此確保微控制器與單埠10BASE-T1L乙太網路MAC-PHY收發器進行網路通訊能無縫銜接。
PyMQTT是一套Python語言函式庫延伸集,用來將MQTT客戶端整合到Web應用。PyMQTT用來訂閱SPE感測器、擷取資料與顯示在圖形介面,以及作為wrapper包裝paho-MQTT套件,簡化MQTT整合到Python應用的流程。
雙埠乙太網路交換器內建10BASE-T1L PHY實體層元件
雙埠交換器(ADIN2111)運用長距離10BASE-T1L技術,將乙太網路連結功能加入到工廠或建築物內的每個節點,藉此簡化網路管理。該雙埠交換器支援低功耗邊緣節點設計,可透過SPI連結各種類型的主控端控制器。像雙埠交換器可用來執行菊環鏈資料傳輸,透過線狀或環狀拓撲連結受限制的邊緣節點。線狀與環狀拓撲是工業環境最常用的架構。每個裝置需要兩個連結埠執行輸入與輸出,因此每個裝置需要一個交換器和雙埠交換器提供的兩個10BASE-T1L PHY。
此外其附帶一整套診斷功能,能監控鏈路品質與偵測各種故障,藉以縮減通訊時間與系統停機時間。系統可即時偵測故障,透過長達1公里的纜線傳遞時故障位置偵測的精準度達到2%,協助縮減停機時間與傳遞時間,允許感測器、致動器、以及控制器的網路透過線形與環狀拓撲進行連結,並延用現有部署的單對雙絞線基礎設施。
(本文作者Richard Anslow為ADI系統應用工程部主任工程師,Chris Murphy為現場技術負責人)