在3G/4G蜂巢式無線通訊系統內,被動式互調問題是一個眾所皆知的困擾。當下行鏈路訊號發射路徑中遇到被動式元件的非線性節點訊號混合,進而產生新的頻率點,而該新產生的頻率點落到營運商的上行鏈路中,將會提高本底噪聲而降低系統效能,此稱為被動式互調干擾。
工廠使用的被動式互調(PIM)量測設備已經商業化20多年,工廠端藉由該設備來驗證被動元件/物件等待測物來符合Low PIM特性,其主要採用2x43dBm功率輸出,確保產品特性可以達到IM3:-150dBc(-107dBm),目前現場客戶亦採用攜帶型PIM測試儀器進行基地台到天線端口的量測,以確保射頻(RF)元件與現場安裝的狀況,唯因應現場環境不同以及基地台線路老舊劣化可能帶來的影響,其標準恐降至為-140dBc。
外部PIM源產生 衍生被動式互調
事實上,即使使用Low PIM的射頻元件與工程師完美的安裝,仍有可能在天線端產生PIM源而衍生被動式互調問題。另外,基地台主天線發射方向或是近端輻射的方向內有非線性的物品或是遮蔽物,將有可能造成該訊號直接耦合回天線系統的接收端,在系統執行相關測試時可能量測到-50dBm (-93dBc),這是非常常見的非線性干擾。
外部PIM源通常來自於鬆動的金屬對金屬節點,這類的非線性相對好識別(圖1),包括屋頂上的空氣處理設備、重疊的金屬層、鈑金電纜托盤、鈑金屋頂通風口以及生鏽的金屬物體等。而其他類型的PIM源相對難以識別,例如屋頂材料看不到的鬆散的金屬對金屬連接、天線後面有鬆動的電纜懸掛器等。
 |
| 圖1 外部PIM源通常來自於鬆動的金屬對金屬節點 |
目前在PIM量測上採用的是Distance-to-PIM(DTP)的方式進行內部或外部PIM源的確認,透過該DTP顯示天線系統內PIM問題的位置,以及與天線系統外部的PIM源距離。這是提高從現場PIM測試中獲得的訊息的一個前所未有的進步,但是仍然存在一個問題,即定位外部PIM源在天線外部,DTP可以告知PIM源位於天線外的距離,但這不包含角度。如果天線具有120度波束寬度,則DTP功能只能說明沿120度的任何地方,而不是準確的位置。
另外,根據不同站點的配置,在天線的前面和後面可能同時存在多個PIM源。這通常是基地台天線架設於屋頂的情況,其中天線從建築物的邊緣凹陷或隱藏在隱藏面板後面以改善場地美觀性。
透過高功率測試音 找出外部PIM來源
參考圖2測試架構,由於PIM分析儀使用兩個連續波形(CW)測試訊號來產生系統中的PIM源,所以產生的IM3訊號也是CW訊號。將安立知(Anritsu)PIM Hunter探頭和適當的帶通濾波器連接到頻譜分析儀的RF IN端口,並調整頻譜分析儀中心頻率以匹配由PIM分析儀測量的相同IM3頻率。將限制線設置為比要查找的IM3 Level略低約10dB,並打開限制報警。
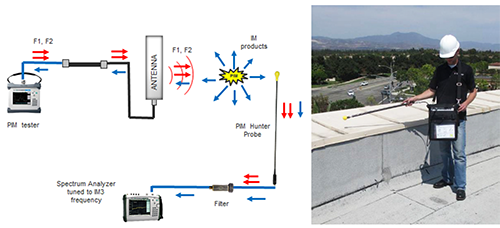 |
| 圖2 測試架構示意圖 |
啟動PIM分析儀以產生高功率測試音,並開始尋找外部PIM來源。當在頻譜分析儀上測量的IM3值增加到超過限制線時,聲音報警器響起,這意味著已靠近PIM源。
如圖3所示,當探頭尖端接近PIM源時,在頻譜分析儀上測量的IM3值快速增加。當探針尖端移動超過PIM源時,IM3水平快速下降。IM3值的變化通常在距離PIM源150毫米(mm)(6吋)內高約10dB。在感興趣的區域中前後移動探頭尖端,直到識別到最大訊號位置。用高度可見的標記這些點,並繼續尋找。直到所有重要的外部PIM源已被識別。
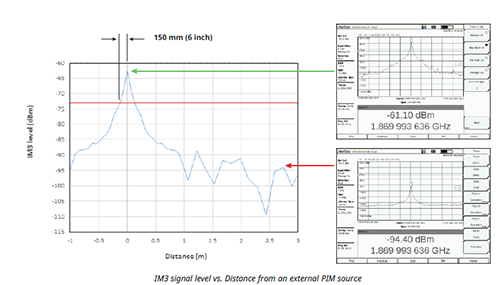 |
| 圖3 探頭尖端接近PIM源時,頻譜分析儀上測量的IM3值將快速增加。 |
當探針尖端遠離PIM源時,發生高訊號變化並不罕見。這是由於來自多個PIM源或站點處的反射表面之IM3訊號的多路徑衰落。一旦接近PIM源,來自該PIM源的訊號變為主導,從而降低訊號電平變化。
在PIM測試期間,MW82119B PIM主機連續打開和關閉CW PIM測試訊號,以減少電池消耗。因此,正在尋找的IM3訊號也是一個脈衝訊號。推薦使用配備有突發檢測的頻譜分析儀,如MS2720T,以有效捕獲脈衝IM3訊號。平均二或三次掃描平滑所得到的幅度,同時保持對PIM電平變化的快速響應。
在大多數情況下,正在尋找的IM3訊號將是相對高電平訊號(-50dBm至-80dBm)。透過上述設置,頻譜分析儀的本底噪聲應遠低於-100dBm。一旦PIM分析儀打開,IM3訊號應出現在頻譜分析儀上。當PIM Hunter探針尖端靠近PIM源時,電平將快速增加。
使用頻譜分析儀的限制報警功能,只有當探頭尖端接近PIM源時才提供聲音報警(圖4)。這允許營運商「監聽PIM源」,而不必不斷地關注頻譜分析儀顯示。根據需要向上或向下調整限制電平,以在探頭尖端在0.25米(m)以內的重要PIM源中時才發出聲音。
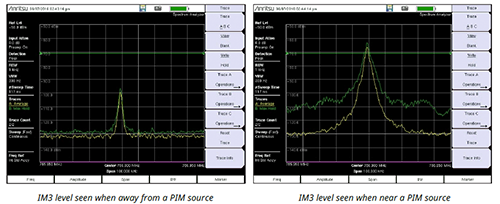 |
| 圖4 使用頻譜分析儀的限制報警功能後,當探頭尖端接近PIM源時將提供聲音報警。 |
另外,在B軌跡線上的最大保持(Max Hold)用於將檢測到的最大IM3電平與當前IM3電平進行比較。如果在掃描整個區域時聽到可聽見的報警,則降低速度,並更慢地掃描該區域以查找發生最大值的位置。一旦識別並標記了PIM源位置,使用重置追蹤功能(Reset Trace)在尋找下一個PIM源之前重置最大追蹤(Max Hold Trace)。實際量測時,可能會遭遇以下幾種情況:
事實證明,人的身體是一個相當不錯的衰減器。如果站在天線和PIM源之間,PIM電平可以降低到30dB以下(圖5)。在探測時,須注意天線的位置,並確保PIM Hunter探針尖端沒有被身體遮擋。
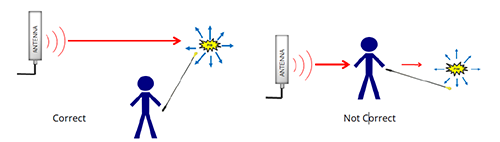 |
| 圖5 站在天線和PIM源之間,PIM電平可能降低到30dB以下。 |
如果PIM源來自於外部,外部PIM尋線過程工作良好。然而,如果主要PIM源在天線系統內部,則天線將IM3頻率發射到現場環境中。輻射的IM3訊號將從天線前面的金屬物體彈開,使得所有東西看起來像PIM發生器。在某些情況下,只須將PIM Hunter探頭放在空中,即可產生高PIM結果。有了經驗,就能學會認識到這種效果,並把注意力集中在天線,而不是環境。
在任何給定時刻,PIM Hunter系統檢測到達探頭尖端的所有PIM源的向量和。在一些情況下,在對機械運動非常敏感的扇區上的某處可能存在高度多變的PIM源,PIM Hunter探測器將檢測到此增加,即使探測器不直接在源上。在移動探頭時,盡量保持靜止,以查看訊號電平是否改變。基於同樣的原因,強烈建議在PIM尋線進行中,每次只有一個人在屋頂上移動。
在某些情況下,如圖6所示,外部PIM源可以在第一次PIM尋找存取站點時輕鬆修復。實例可能包括去除鏽蝕,並向鋼物體施加新的塗層,緊固安裝硬體或將金屬物體包裹在射頻吸收泡沫中以衰減PIM。從圖7可以看到改善前後PIM值的變化。PIM分析器在外部PIM識別與修復過程中用於多種目的。其首先用來當作高功率訊號源,使PIM Hunter能夠精確地識別外部PIM位置;亦可執行必要的通過/失敗測量,以記錄是否固定以及臨時固定將能滿足系統要求。
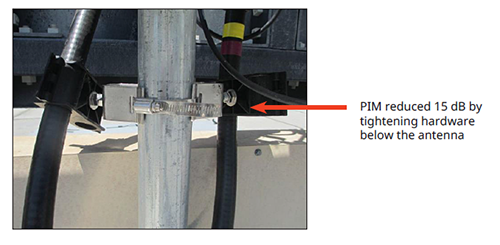 |
| 圖6 外部PIM源可以在第一次PIM尋找存取站點時輕鬆修復 |
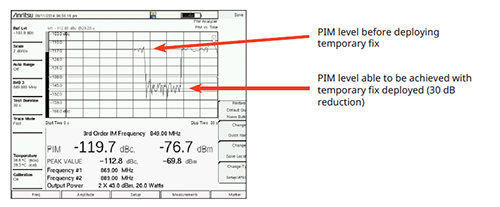 |
| 圖7 改善前後PIM值的變化 |
檢測外部PIM源的位置對於全世界的行動營運商來說是一個極其困難的問題。利用PIM Hunter,搭配PIM Master和Spectrum Master產品,電信營運商可以精確識別外部PIM源,便接著可以部署各種PIM改善方案,以減少PIM Level並提高基地台系統性能。
(本文作者為安立知業務暨技術支援部門專案副理)