無人機市場朝多元化發展。無人機在不同產業領域開啟許多新的服務,包括農業、營造、娛樂、保險、地圖繪製、新聞採訪及公共安全等,獲利成長可期,因此也吸引微控制器、微機電感測器和GPS晶片商相繼發表產品,搶占無人機市場。
無人機發展,最早是採用固定翼無人機,但因需要跑道,操作環境受限,後續又發展出直升機無人機,使無人機的起降空間問題得以改善,但不管是固定翼或直升機,飛行器的操控仍需專業訓練,市場有其局限性。多旋翼無人機讓飛控技術簡單化,使用上較為容易,最終將無人機引導至產量最大的消費性市場,無人機市場頓時成為各界目光焦點。
國際研究機構IHS預估,2016年至2025年,無人機產業的產值將超過八百二十億美元,其中消費級無人機主要應用在航拍娛樂,為2016年最熱門的應用,總共占全球約四成以上的市場;在工業級無人機方面,於農林植保產業約占三成市場。其餘如救災、公安、氣象、包裹遞送等應用,預計占三成市場。
無人機飛入尋常百姓家
資深產業分析師顧馨文表示,從近兩年來看,可看到新的飛行相機型態出現,整體而言,在消費型無人機部分,會逐漸朝向空拍、自動跟蹤(Follow Me)、小型化可折疊與操作更為簡單的設計發展。其中,具備Follow Me功能的無人機已於2015年底至2016年初開始有歐美廠商發表相關產品,直到2016年底,陸廠相關設計的無人機才開始推出,預計2017年產量才會開始大量上揚。
 |
| 圖1 u-blox商業開發經理劉彥呈表示,2016年無人機設計開始朝向一體式的垂直整合設計,尤其是七百美元以上機種。 |
此外,無人機畫面結合頭戴式應用也為近兩年發展的新興應用,以跟蹤拍攝功能結合APP操控,讓使用者透過頭戴式顯示器,以第一人稱視角體驗身歷其境的應用。例如深圳無人機新創企業億航(Ehang),2015年底推出的Ghostdrone 2.0無人機,則與眼鏡式(Goggles)顯示裝置結合,可將無人機之拍攝畫面即時顯示於眼鏡鏡面,讓第一人稱視角更直覺、適切地呈現。再者,該眼鏡裝置可感測使用者之頭部動作(如抬頭/低頭),並據以調整無人機之相機拍攝角度(仰角/俯角),進一步強化使用者體驗。
以技術層面來看,u-blox商業開發經理劉彥呈(圖1)指出,2015年無人機設計主要是以組裝、拼貼式的生產架構為主,像是在無人機加裝其他廠商的外接式相機,以增添影像拍攝功能;而2016年無人機製造商則是投入更多資源,提供垂直整合的解決方案給消費者。換言之,2016年已可看到越來越多的無人機製造商開始自己開發相機,並將其整合進自家的無人機產品中。
低價/小型化設計當道 無人機自拍成顯學
無人機航拍市場朝向個人自拍市場邁進。無人機導入個人自拍概念,促使消費性產品設計趨於微型化和方便攜帶,有如手機與相機的延伸替代方案,成為記錄生活大小新鮮事的空中載具。
盛群產品技術開發處馬達產品技術部專案處長潘健章(圖2)表示,無人機的生產成本與學習門檻不斷降低,產品價格平民化,加上社群媒體平台分享的意識興盛,無人機開始導入個人化自拍的概念。看好此市場發展前景,無人機廠商紛紛開始擴大投入自拍無人機生產,2016年自拍型無人機如雨後春筍般冒出,且皆強調小型化和價格親民的訴求。
 |
| 圖2 盛群產品技術開發處馬達產品技術部專案處長潘健章表示,無人機自拍風潮成形,為無人機營收帶來新動能。 |
舉例來說,大陸業者零度智控的DOBBY與台灣經緯航太科技的Venus,基本上價格與一台智慧型手機相差不遠,約介於4,600∼10,000台幣左右。換言之,可將無人機想像成一台高階的智慧型相機,可隨身攜帶在包包或口袋中,做為自拍使用。
整體來說,潘健章分析,上述這類型的無人機,基本上已可支援手機APP遙控/語音操控等起飛方式,透過手機APP框選目標,即可讓無人機跟隨飛行,具備Follow Me的跟蹤功能,同時亦可透過手機遙控無人機,提供不同於以往的拍攝手法。
潘健章談到,Follow Me這種功能已大致於2016年被全面導入,不管是專業型或者是這種微型化無人機自拍的概念,廠商都會導入Follow Me的機制。他強調,此為一種市場概念上的轉變,加上關鍵零組件技術的進步,所引發的趨勢。例如照相機產業的出現,讓影像訊號處理功能開始變得平民化,進一步相繼導入相機與手機裝置之中。
綜而言之,潘健章表示,自拍型無人機驅動無人機產業走向個人性消費市場,若是要擴大該市場的版圖,則必須延長無人機的飛行續航時間,而這也點出了無人機在關鍵技術上的改變。
早期玩具級的無人機產品,採用的大多為直流(DC)無刷馬達元件,直至2016年,開始有了無人機產品等級的區分,依序分為消費級玩具型無人機、消費級航拍型無人機和工業級無人機(圖3)。
潘健章分析,通常玩具型的無人機大多採用DC有刷馬達,該款馬達價格便宜,但飛行時間為十分鐘以內,續航能力較低。而消費級航拍型無人機則大多採用直流無刷(BLDC)馬達,優化電源使用效率,可支撐約二十至三十分鐘的飛行時間,因此在消費型市場中,為了要延長產品飛行時間,採用BLDC這樣產品概念的市場會愈來愈明顯。
潘健章表示,無人機系統的組成架構涵蓋了五大要素,包含飛控板、BLDC電子調速器、攝像設備(輸入/輸出)、遙控器、鋰電池和充電器等。若要使四軸無人機飛行,需要控制四個電機的轉速,以實現垂直、水平飛行與水平轉動的動作,其飛行器訊號處理過程可參考圖4。
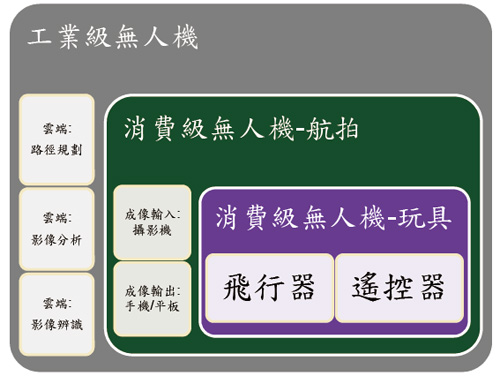 |
| 圖3 各類型無人機規格區分。 |
潘健章談到,盛群主要是專注於在無人機微控制器(MCU)的製造與開發,提供高性價比的整合性專用MCU,包含飛控板的主控MCU、電子調速器的BLDC馬達轉速控制MCU、遙控器端的主控MCU與控制相機角度的攝像雲台MCU等產品,其優勢在於可降低控制板BOM生產成本,並突破產品尺寸的限制,目標市場為產量最大的消費玩具無人機市場。
另一方面,除了MCU之外,GPS定位系統在無人機的發展也逐漸嶄露頭角。劉彥呈表示,無人機市場可分為消費型與商用型市場,在消費型部分,早期無人機並無加裝GPS解決方案,但今年無人機市場上,看到定價約七百美元以上的機種,基本上皆含GPS的解決方案,而三百美元以下的機種,內建GPS的比例亦逐日增加。
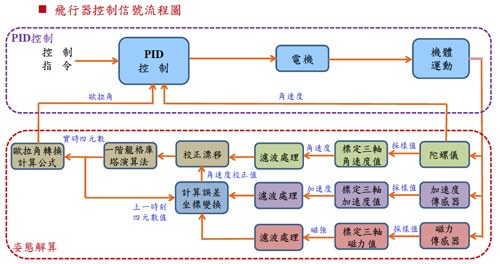 |
| 圖4 無人機飛行訊號處理流程圖。 |
提升安全避障效能 精準定位需求日增
為提升安全避障功能,商用型無人機更朝向精準定位的方向邁進,其應用範圍包含土石流勘察、犯罪行為偵查,以及在大型商演或艱困環境下,實行影像紀錄與勘察等功能。
劉彥呈分析,GPS定位系統的價值在於可以記錄行經路徑的時間、速度、高度,因此無人機可藉由GPS的功能,做地形勘察,確認經過的地方、環境並且蒐集圖像資訊與拍照等。他表示,GPS定位容易受到外部環境干擾,若非採用精準定位的方式,無人機可能會有飄移的狀況發生,採集到的照片與經緯度座標也會與計畫有落差。
基於此,專業型無人機的定位精準度要求更勝以往。劉彥呈表示,2016年該公司已推出公分等級的GPS解決方案,此解決方案的運作模式,主要是在無人機上添加一顆GPS,同時也在螢幕顯示器的遙控器端內建一顆GPS,利用UHF訊號串聯兩端的訊息,進而透過演算法提升GPS的精準度。
劉彥呈指出,早期在還未有公分級的精準定位時,實現GPS定位可分成兩種,第一種採用的是Host-based架構,像是手機的定位系統,透過半軟體、半硬體方式定位,在移動時運用CPU做演算,因此電池的耗電量會提高;第二種為硬體GPS,或稱Stand-alone架構,裡面內建ARM CPU協助即時演算,因此移動越快速,可提供的資訊仍精準且快速,而此方式也為u-blox採用的做法。
整體而言,市面上大多數無人機都是採用硬體GPS的架構。劉彥呈談到,今年GPS在消費性無人機市場,約有30%的成長;而在專業型無人機部分,基於安全和法規限制的考量,需要進行一連串測試,故成長速度較為緩慢,不過現階段已有廠商開始計畫導入。
加強溫控/減振效能 無人機走向產業應用藍海
近年來消費性無人機市場急速起飛,導致消費性無人機市場已迅速從藍海轉變成紅海,價格競爭非常激烈,為尋找另一波發展動能,關鍵零組件商紛紛強化其元件的溫控、減震效能,布局專業型或產業用無人機市場,尋求較好的利潤空間。
亞德諾(ADI)亞太區微機電系統(MEMS)市場經理趙延輝(圖5)表示,全球各地的天氣溫度變化皆不同,有時不同地區的溫差可高達攝氏幾十度,因此專業型無人機對於元件的溫控要求強烈。為此,研發人員採用類似於加熱電阻的辦法,來讓MEMS感測器所處的環境溫度維持在近似恆定的水準,以避免溫度補償校正。與此同時,還須透過全溫範圍內的補償校正,解決MEMS元件的溫控問題,否則難以保證飛行器在各種溫度條件下都能出色飛行。
 |
| 圖5 ADI亞太區MEMS市場經理趙延輝表示,考量全球各地氣溫變化差異,無人機元件對於溫控和減震需求遞增。 |
另一方面,趙延輝指出,元件抵抗振動能力的需求,源自於消費級的三軸加速度計和三軸陀螺儀對振動都非常敏感,在振動較劇烈的狀態下,其輸出數據會出現很大的偏差。舉例來說,加速度計有振動整流誤差存在,在振動狀態下,經濾波後,感測器的零點還是會出現偏差。
值得注意的是,很多減振材料在高溫下都會迅速老化,一旦減振材料老化,出廠時的精度便較難保證。因此,工業級MEMS感測器的設計牽涉到許多複雜的考量,一方面要維持感測器所處的環境溫度穩定,避免元件輸出訊號產生溫度飄移,另一方面則必須考慮到加熱電阻會加速減震材料老化的問題。
即使完成了這些複雜設計,用消費類MEMS元件還是會犧牲一定的產品性能,包括在極端情況下的穩定性。眾所周知,一般消費性MEMS元件都是塑膠封裝的,與工業級的陶瓷封裝比,它本身就對外界溫度、濕度、壓力更加敏感。在飛行器不小心墜地後,工業級MEMS元件的穩定性和消費級MEMS元件的穩定性還是有天壤之別。
基於上述因素,現階段有許多工業、農業與高階航拍無人機等,大多還是選用工業級MEMS元件。趙延輝透露,ADI的MEMS元件專注於滿足在各種極端條件下的產品性能,比如在振動狀態下的輸出精準度,受衝擊後的產品穩定性,瞬間超程的保護設計,全溫範圍內的重複性和穩定性等。
此外,趙延輝談到,模組化的解決方案也是該公司未來的發展方向之一,也就是三軸加速度計加上三軸陀螺儀的六自由度單晶片產品。這樣的產品會在出廠前做好正交校正、非線性校正、線加速度校正和各種指標的全溫範圍內的溫補校正等,這樣用戶可以專注在軟體發展上,最大限度地簡化硬體設計。
羅姆感測器加持 創造差異化無人機應用
除了ADI之外,羅姆(ROHM)也不甘示弱大秀新款加速感測器—KX222/KX224,最大檢測範圍可高達±32G。藉由該感測器方案,羅姆希望協助台灣工具機及無人機業者開發出具備差異化特色的產品。
ROHM台灣設計中心Kionix產品經理李正寧(圖6)表示,無人機是羅姆布局的重點應用,主要產品則是新款加速感測器與陀螺儀。他強調,此兩款元件是無人機領域必備的元件。
 |
| 圖6 ROHM台灣設計中心Kionix產品經理李正寧認為,加速度計與陀螺儀這兩項元件是無人機保持平穩飛行不可或缺的要件。 |
李正寧進一步指出,無人機的原始設計是直升機,直昇機有兩個旋翼,一個位於機身上方採取水平橫向旋轉方式,另一個則是位於機尾採取垂直旋轉方式。當上方旋翼旋轉時,若沒有垂直旋轉的旋翼抵銷上方旋轉力量,直升機就會原地打轉,飛不起來。因此,需要垂直旋翼來平衡旋轉力量,協助直升機向上飛行。
然而,若要平衡旋轉力量,垂直旋翼須要不間斷地調整正確的旋轉力道與移動角度,故須透過陀螺儀偵測,適時提供旋翼旋轉的力度訊息並提高旋轉力,使直升機不會產生失控狀況。相同的,無人機採取多軸的水平旋轉方式,因此更需要倚靠陀螺儀偵測各個旋翼的旋轉力度,並且不停調整。
整體而言,無人機必須使用陀螺儀否則無法穩定飛行。再者,加速度感測器在無人機應用也占據了不可或缺的地位,透過加速度感測器可提供陀螺儀因積分而導致的累進誤差校正使用,同時,也可使用同一顆加速度感測器進行無人機運動監控,達到節電目的或滯空時的機身平衡監控。
以台灣產業來說,目前投入無人機市場相對於歐美與大陸地區等國家略顯不足。李正寧認為,主要原因在於台灣長期以來,都不是製造高利潤的產品,在獲利有限的情況之下,不太有勇氣向前跨出一大步,所以往往都是國外的廠商做出來以後,台灣再做類似的產品。在此情況下,已失去無人機的先機,必須要力拼差異化產品以扳回局勢,否則僅能深陷價格戰的泥沼之中。
有鑑於此,李正寧建議,台灣廠商應朝向工業或商業用的無人機市場邁進,深耕專業市場並尋求更具創新力與差異化產品,加強台灣廠商自我競爭力。
視設計者要增加那些應用在無人機上而定,李正寧表示,該公司在感測器領域可提供磁感測器、加速度感測器與陀螺儀,實現無人機GPS定位和機身動態監控,此外,也可透過壓力計偵測無人機高度控制,其他還有照度感測器、溫度感測器,可加強無人機功能,協助設計者製造差異化的無人機應用。