十軸MEMS感測器可望加速問世。國際MEMS大廠及工研院微系統中心正紛紛利用SiP、單晶片整合及模組整合技術,全力發展內含加速度計、陀螺儀、磁力計和壓力計的十軸感測方案,為MEMS產業發展帶來全新樣貌。
了解各種MEMS感測器原理
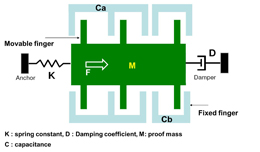 |
| 圖1 加速度計感測原理 |
自從2006年任天堂(Nintendo)將微機電系統(MEMS)三軸陀螺儀應用於家庭遊戲主機Wii,新型態動作輸入介面已造成次世代人機互動遊戲產業產生巨大變革。再加上智慧手持裝置所帶來的新式人機互動介面概念,新世代互動式動作輸入介面以及智慧化多功互動,儼然成為數位生活的必要功能。
在這些互動式輸入裝置中,MEMS多軸(Multi DOF)感測元件扮演極為關鍵的角色,由此核心智能感測裝置所帶動的應用產業正呈現爆炸性發展,包括智慧型手機、滑鼠、大型遊戲機、遊戲軟體、IC設計、MEMS代工業、遊戲機代工廠商及網路遊戲服務提供廠商皆雨露均霑。
根據Yole Developpement市場報告指出,未來幾年,包括消費性智慧型通訊產品、車用安全監控、自動化機器人、工業控制及軍事國防等領域,均將帶動整合型多軸MEMS慣性感測器出貨量巨幅成長,預期六軸慣性量測單元(6-axis Inertial Measurement Unit)(包括加速度計與陀螺儀),以及由此兩種元件衍伸出的九軸IMU(加入三軸磁力計)和十軸IMU(再加入壓力計),將躍居MEMS產品中年營收最大的產品。
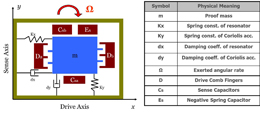 |
| 圖2 陀螺儀感測原理 |
以十軸MEMS感測器為例,其主要包含三軸加速度計、三軸陀螺儀、三軸磁力計及壓力計四種感測元件。各種感測元件分別量測不同的物理量,而感測機制也有所不同。在MEMS中常見的感測機制有電容式和壓阻式等,本文主要將針對目前最常見的電容式感測機制與作用原理分別說明。
了解各種MEMS感測器原理
首先在加速度計方面,一般電容式加速度計感測原理主要是利用牛頓第二運動定律,物體的加速度與物體所受的合力成正比,並和物體的質量成反比;而物體加速度的方向與合力的方向相同,如圖1所示,可動質量塊值以m表示,並藉由彈簧(K)所支撐。
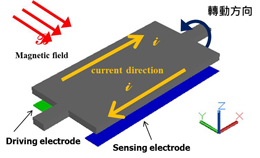 |
| 圖3 電容式磁力計原理 |
當加速度計受到外力作用時,質量塊將產生位移,與上下電容板感測電極之間的距離就會產生變化,因此電容值亦將隨之變化,再根據電容值變化的大小即可反推目前所受的外力值。
至於陀螺儀原理係利用柯氏效應(Coriolis Effecct)感測物體的角速度。陀螺儀的運動包含兩個模態,分別為振盪器模態及柯氏加速度計模態,在無角速度情況下,振盪器保持在一定的振幅與頻率下沿著振盪器驅動模態振動,當外界角速度輸入至陀螺儀時,此時感測質量會因柯氏效應沿著柯氏加速度模態產生位移,造成感測電容的變化,同理可藉由此電容的變化推算外界角速度(圖2)。
電容式磁力計原理則是利用磁場與電流所產生的勞倫斯力(Lorentz Force),,如圖3所示。其中,L為導線長度,n為導線線圈,i為電流大小與方向,B為磁場大小與方向。電容式磁力計的主要特色就是在感測質量上須有感應線圈並通入電流,當外界磁場產生變化時將會導致感測質量產生位移,此位移將會使其感測電容產生變化,因此可推估目前的磁場大小。
電容式高度計(Barometer)亦可稱為高解析度的壓力計,與前述的加速度計、陀螺儀與磁力計不同之處,在於前三者主要是質量塊受到外力使質量塊與彈簧產生位移(質量塊的運動視為剛體運動)造成電容變化;而壓力計是利用薄膜因外界壓力產生的形變(彈性體形變),使電容改變進而推算出目前外界壓力值,再進一步推算目前所在高度(不同的海拔下大氣壓不相同)(圖4)。
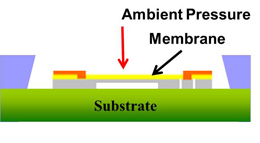 |
| 圖4 壓力計原理 |
市售多軸MEMS感測產品因應用不同,在組合上也不盡相同。常見的整合方式主要有單純的六軸IMU,包含加速度計與陀螺儀,或是含加速度計與磁力計的電子羅盤(E-Compass),以及更多功能的十軸定位感測模組等。而多軸MEMS感測器依整合方式可分為單體整合(Monolithic Integration)、系統級封裝(System in Package, SiP)及模組整合(Board Level Integration)三種。
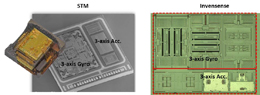 |
| 圖5 六軸單體整合MEMS感測器示意圖 |
單體整合是指將所有感測元件採同一製程平台整合於單一晶片內。目前在單體整合部分已有應美盛(InvenSense)及意法半導體(ST)成功將六軸慣性感測元件(三軸加速度計與三軸陀螺儀)整合於一單晶片中(圖5)。至於九軸MEMS感測元件的發展多仍處在開發階段,且目前九軸MEMS感測元件的整合多採SiP整合方式(圖6)。
磁力計/壓力計拋難題 多軸感測器整合受限
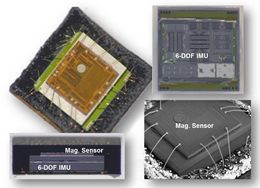 |
| 圖6 九軸SiP感測元件架構圖 |
由於磁力感測元件採用磁阻式或霍爾效應(Hall Effect)感測原理,而非電容式技術,因此單體整合將面臨極高的挑戰。雖然SiP整合方式對不同的應用需求具有較高的整合彈性,但是在整合的複雜度上相對較電容式的高,且須有磁阻式特用讀取電路與量測校正系統,無法與電容式的感測元件共用。
儘管意法半導體曾發表有關於九軸的單體整合(採全電容式的加速度計、陀螺儀及磁力計),但目前市面上仍無此產品,現有九軸產品規格與性能如表1所示。
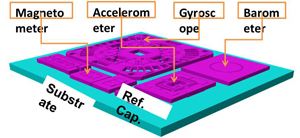
在未來的十軸感測技術發展上,目前並無單體或SiP整合的產品,大多以模組整合的方式呈現,如圖7所示。主要原因除了在磁力計的整合上與九軸具有相同問題外,另外在壓力計的整合上也是一大挑戰,壓力計一般是以薄膜做為感測動件,因此在製程上較不容易與需要厚膜做為感測元件的慣性元件整合。
此外,在封裝上,壓力計的感測動件必須有一端與大氣接觸,因此在封裝上的整合亦有一定的難度。表2列出目前亞德諾(ADI)及意法半導體兩家廠商的十軸產品,主要是以Board Level模組的方式,整合四種不同的感測晶片。
此外,由表2亦可發現目前十軸MEMS感測器解決方案的晶片尺寸仍然較大,在系統設計應用上將受到許多限制,且在元件整合成本的競爭優勢上也相對較低。
整合設計大勢所趨 多軸MEMS炒熱感測應用
 |
| 圖7 十軸整合感測模組架構圖 |
多軸慣性感測技術雖有一定的難度,但依市場需求與應用發展方向來看,多軸設計仍將是晶片商布局重點。根據Yole Developpement市場分析報告指出,為滿足未來各種智慧型行動裝置更多元的應用功能開發需求,如室內導航、適地性服務(LBS),甚至健康監控(Health Monitoring)等,可知道未來多軸MEMS感測器除朝向更多功能的整合外,在元件整合方面也將朝整合性更高與尺寸更小的單體整合邁進。
由於加速計/陀螺儀/磁力計的組合將逐漸成為智慧型手持裝置必備的感測單元,因此未來系統開發商對多軸感測解決方案的需求,將朝向在較小封裝內的組合產品(SiP),甚至採單體整合的方式取代更多分離式元件。根據Yole Developpement預測,2012~2018年整合式慣性感測器年複合成長率(CAGR)將有43%的亮眼表現,市場規模更可望達到20億美元以上。
不過,現有整合型多軸MEMS感測元件的技術挑戰還包括多物理量感測元件設計與系統整合、系統封裝測試、類比前端/數位電路及對應的應用軟體等諸多難題,意味著MEMS晶片商仍有一段很長的路要走。
助台商搶攻感測商機 工研院力推多軸MEMS設計
台灣在這一波多軸MEMS感測元件商機的熱潮下,已有許多廠商打入此產業鏈中。目前在全球MEMS慣性元件產業供應鏈,除有菱生進入元件封裝供應鏈,以及台積電、聯電、亞太優勢的MEMS元件代工外,在上游元件設計端關鍵技術,國內已有立錡科技自工研院南分院微系統中心技轉技術,是台灣少數具有感測元件設計能力廠商,但目前對多軸MEMS感測器的整合與設計仍須加緊投入研發。
至於工研院對整合加速度計、陀螺儀、磁力計和壓力計的十軸IMU設計關鍵技術已深耕多年,並且累積相當豐厚的經驗,目前已開發一款多軸MEMS感測器方案,性能規格達到國際水平,甚至在某部分的規格已超越國際水準。
此外,工研院在多軸MEMS慣性感測元件(包含加速度計、陀螺儀、磁力計與壓力計)專利上具有相當完整的布局,且無論在九軸、十軸的單體或SiP整合技術研究上都有不錯成績,可採單一製程平台的全電容式結構整合十軸感測元件於單一晶片中(圖8),進而大幅縮小尺寸與成本,且兼顧多元感測性能。
 |
| 圖8 多軸慣性感測元件應用需求發展藍圖 |
無庸置疑,以目前的MEMS多軸感測技術發展趨勢來看,未來勢必朝向整合度更高的多功能整合型感測器發展,除原有的十軸外,將再導入其他的感測功能,如氣體、濕度感測等。
另外,晶片商在實現高度整合的同時,降低感測元件功耗亦是非常重要的議題。特別是未來穿戴式的電子產品,因輕薄短小的特性,在電池容量上將受到限制,導致對元件功耗的要求更加嚴苛,相關晶片業者須投入研發更微型化的感測元件技術,以同時滿足設備商對元件整合度、功耗,以及更高性價比的需求。
(本文作者為工研院南分院微系統中心微元件技術部研發副理)