全球交通事故死亡人數逐年攀升,導致社會與經濟效益嚴重損失。基於此,如何透過自駕車與智慧機車的導入,掌握行動安全發展契機,將成為台灣降低交通事故災害的重要方法之一。
全球交通事故死亡人數逐年攀升,導致社會與經濟效益嚴重損失。基於此,如何透過自駕車與智慧機車的導入,掌握行動安全發展契機,將成為台灣降低交通事故災害的重要方法之一。
根據聯合國世界衛生組織提供的統計數據,全球每一年約有130萬人死於道路交通事故,平均每一天有3,000多人死亡,而受傷人數每一天更高達5,000萬人,根據相關調查,這些交通意外事故預計成為全球第五大死因。因此聯合國已經將道路安全列為每個人的基本人權,推動2011~2020年為道路安全行動十年,同時OECD研究指出,2015年交通事故社會損失在先進國家占GDP的2~5%,交通事故導致社會效益與經濟層面的嚴重損失,更影響一個國家人民的安全信賴感(圖1)。
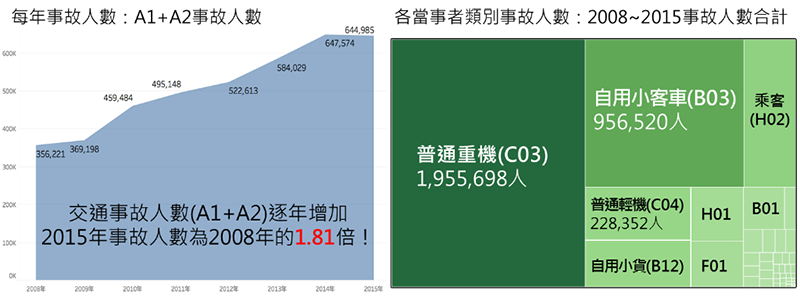 圖1 台灣每年交通事故資料及各類別占比
圖1 台灣每年交通事故資料及各類別占比
資料來源:警政署道路事故資料
台灣在2013年的車禍傷亡社會損失高達4,748億元,占該年GDP的3.1%。為了提升台灣交通的安全性與智慧化,智慧交通的系統理念逐漸興起,藉由新世代的通訊網路和數據處理能力,整體提升交通系統的整體效率,降低事故危險並增加運輸安全和便捷程度,這也是資策會智慧系統研究所近幾年所專注的研究領域。
智慧交通涵蓋範圍相當廣泛,是將先進的資訊技術、數據通訊傳輸技術、電子感測技術、控制技術及計算機技術等有效並集結運用於交通系統,進而提升交通系統效率的綜合性應用,其目標在提高運輸效率、保障交通安全、緩解交通壅堵以及減少空氣汙染。
本文在原有的車載資通訊技術能量累積下,持續朝向自駕車、智慧交通等相關領域技術發展,同時關注台灣是一個機車使用率居於全世界之冠的國家,因此在發展智慧交通的技術開發中,必須多元的考量台灣混合汽車與機車等複雜的交通環境,同時台灣都會區地狹人稠,在道路設計上面因為有先天的歷史背景等等因素,大多無法像國外馬路一樣每條都又大又寬敞,這也是在台灣研發有關智慧交通技術上必須納入考量的部分(圖2)。下面將說明關於自駕車與智慧機車相關的研究介紹。
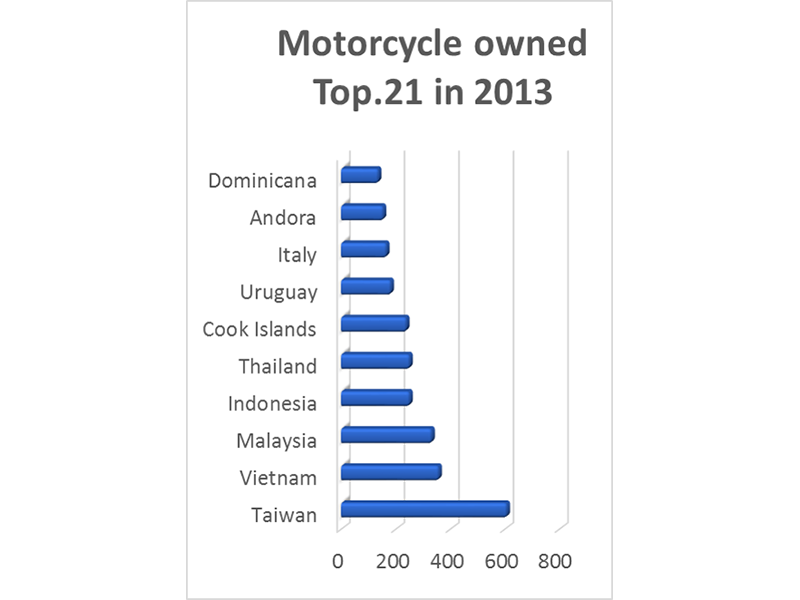 圖2 2013統計台灣機車居世界之冠
圖2 2013統計台灣機車居世界之冠
資料來源:WHO(2015)道路安全全球發展報告
自駕車人工智慧駕駛技術
自動駕駛汽車,又稱為無人駕駛汽車(Autonomous Car),為具有感知、決策及控制之智慧化載體。此類透過資訊系統進行遠端控制、自動引導或自主驅動運行之運輸工具,具有傳統汽車的運輸能力,不需要人為操作即能感測其環境及導航,能以雷達(Radar)、光學雷達、GPS及電腦視覺等技術感測其環境。先進的控制系統能將感測資料轉換成適當的導航道路,以及障礙與相關標誌。自駕車能透過感測輸入的資料,更新其地圖資訊,即使條件改變,或汽車駛進了未知的環境內,也能讓交通工具持續追蹤其位置。
比起傳統運輸工具,自駕車可降低人為缺陷(如疲勞、觀察力等)的載人或載物之交通工具(圖3)。目前市場已有相關試營運種類如下:
 圖3 目前已進行試營運的自駕車類型
圖3 目前已進行試營運的自駕車類型
資料來源:資策會
自動駕駛運行主要動作分為「感知」→「決策」→「控制」三個程序(圖4):
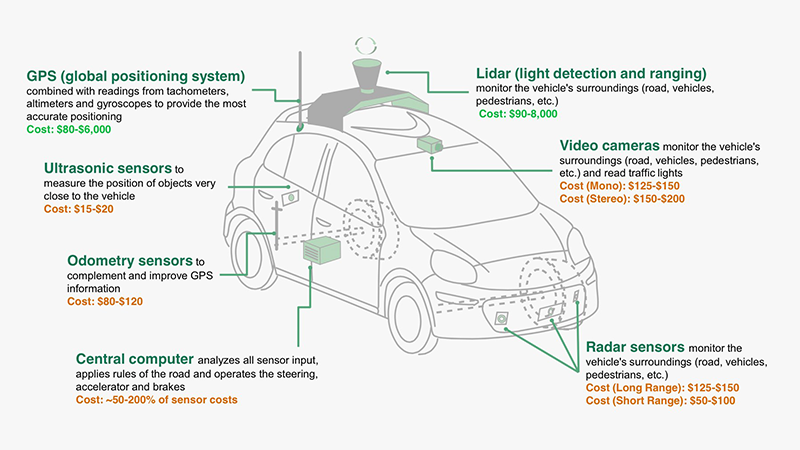 圖4 滿足自駕車感知、決策、控制的感測器類型
圖4 滿足自駕車感知、決策、控制的感測器類型
資料來源:資策會
目前國際各大自駕解決方案廠商皆安裝四個以上的感測元件進行道路狀況感知(圖5)。
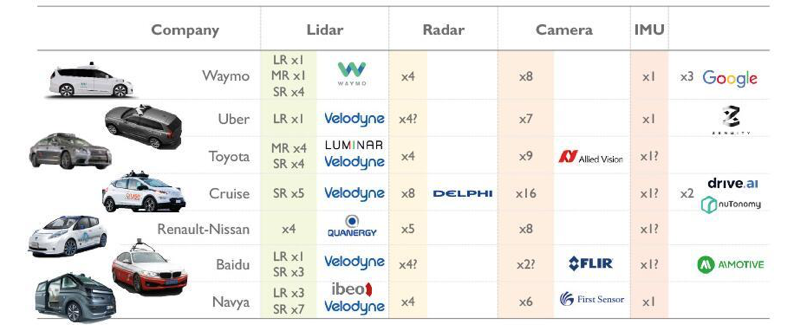 圖5 國際各大車廠自駕車感測器元件採用狀況
圖5 國際各大車廠自駕車感測器元件採用狀況
資料來源:資策會
雷達技術採用高頻的電磁波運作,透過毫米波傳送;和光波相比,在與被測物體接觸時,無線電波的吸收較少,因此,Radar的有效工作距離相對更遠。目前車載雷達的頻率主要分為24GHz頻段和77GHz頻段,其中77GHz頻段是國際電信聯盟專門劃分給車用雷達的頻段(圖6)。
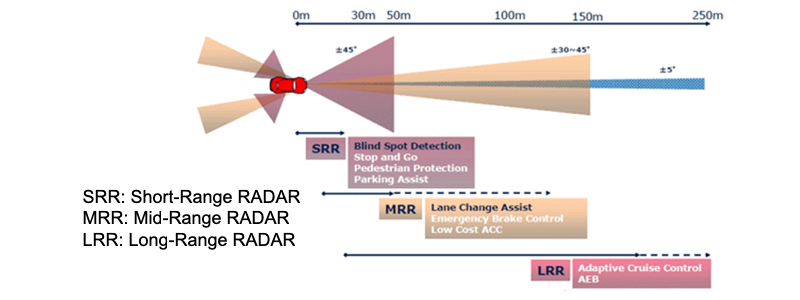 圖6 雷達感測器依據頻率劃分感測距離
圖6 雷達感測器依據頻率劃分感測距離
資料來源:資策會
雷達通過天線發射和接收電磁波,所發射的電磁波並非各向均勻的球面波,而是以具有指向性的波束的形式發出,且在各個方向上具有不同的強度。目前車載雷達中比較常見的是平面天線陣列雷達,因為相比其他實現方式,平面雷達沒有旋轉機械部件,從而能保證更小的體積和更低的成本。
光達(LiDAR)是透過射出與接收雷射,利用反射光建構出立體影像,經此判斷自駕車所在位置與檢測周遭障礙物。
機械式光達的產品多年來已經得到實際的驗證和使用,其用戶遍及了汽車主機廠、自動駕駛研究機構和三維測繪等領域,目前是大家公認的市場老大。但因受到繁複的精密光學裝調工作量的影響,目前Velodyne的產能嚴重受限,遠遠跟不上市場的需求。整合化是Velodyne解決裝調和成本問題的必然之路。可看到Velodyne已經開始向整合化的道路邁進,一旦實現高度整合後,其產能將不再受到制約,成本也會大幅度降低。
Quanergy在2016年公開Solid State LiDAR工作原理,採用的是光學相控陣列技術,其原理與相控陣雷達一樣,通過調節發射陣列中每個發射單元的相位差來改變雷射的出射角度。
深度學習影像辨識技術可應用於智慧交通相關應用,包含車輛辨識、路況處理、駕駛行為分析與交通管理,以解決交通擁塞、道路規畫與交通自動化管理等相關問題,將有效提升智慧城市的管理效率。
建立一使用深度神經網路學習街景環境中各類動靜態物件之影像辨識技術,透過台灣街景影像資料庫「FORMOSA」資料集(開創國際能見度)與合成特殊邊角案例之訓練資料,建立在地化分析模型與技術,發展結合國內硬體嵌入式系統,以提升系統辨識效率(縮短時間)與偵測辨識準確率,促進相關產業發展與提高國際競爭力。
以台灣特有之道路狀況,在多元特殊交通道路物件(如交通標誌號誌、自行車及機動車輛)與天候(陰雨天、暴雨及陰暗隧道)等環境,建立台灣街景影像資料庫「FORMOSA」資料集與訓練模型,輔以虛實合成之邊角案例訓練資料,運用深度學習訓練並建立資深駕駛的「影像辨識大腦」,協助產業提供高安全高效率的自動駕駛能力的服務。
自動駕駛技術發展與挑戰
感測器的挑戰,舉例來說,LiDAR花費太貴,如遇雨、雪、霧、霾則效果不佳;Radar的反射物件資訊解析度不足;相機感測,則容易因不良天候,或是光線及環境因素導致感測效果不佳。
建議用各式感測器資訊融合方式取得最佳組合效果,實際對真實道路環境訓練資料。由於蒐集及標記需大量人力,須自動化快速標記工具及運算平台。而嵌入式平台現況價格偏高,且運算效能還需再提升。此外,驗證環境需真實測試場域,而整體建置成本高,若不具經濟規模於無營運模式下無法永續進行。雖虛擬模擬器可解決初期無真實環境驗證之問題,但因模擬器產生之擬真物件尚無法100%擬似真實物件,最後還是需要真實環境驗證。
二輪車之先進安全系統
根據全國監理站統計,截至2018年9月為止,台灣機車數量達1,382萬輛,每百人機車數為92.6輛,是亞洲機車密度最高的國家,因此擁有發展二輪車先進安全系統的最佳環境,台灣可以發展二輪車的先進安全系統,並且透過制定標準來建立規範以及解決方案,將更有利於切入二輪車前裝市場,如此一來便可將此技術輸出二輪車複雜車流相似的國家(如:越南、馬來西亞、印尼等)。
交通安全的提升除了透過交通工程改善(包含道路幾何設計、標誌、標線、號誌等),還可透過交通肇事分析,從肇事的統計資料、碰撞構圖等研擬改善方案外,藉由先進的物聯網技術並整合人、車、路的三種面向,再針對「車輛」的角度來提供主動式的安全防護,進一步改善交通安全。根據交通事故統計資料,側撞(Side Crash)事故比例約占所有事故中的三分之一,其中車輛類型又以機車最高,而事故地點常發生在十字路口上,因此可透過智慧道路聯網發展路口的安全警示來降低交通事故發生。
路口安全警示
在安全警示系統中,包含安裝於機車上的發報器與路口的智慧路側系統,在車輛行經路口時,機車發報器會與智慧路側系統進行連結,傳遞車輛的移動資訊、行進狀態,智慧路側系統同時會收集各道路的車輛資訊後進行碰撞的決策運算,不同的路口環境有著不同的決策運算方式,一旦運算結果顯示可能發生意外事故時,即透過智慧路側系統上的警示燈牌、車上儀表板警示燈號、車機或智慧型手機,提前告知駕駛注意有其他車輛行經路口,目前的行進狀態下將會造成事故發生,藉此提醒駕駛者改變車輛行進狀態,以降低車禍碰撞事故發生的發生(圖7)。
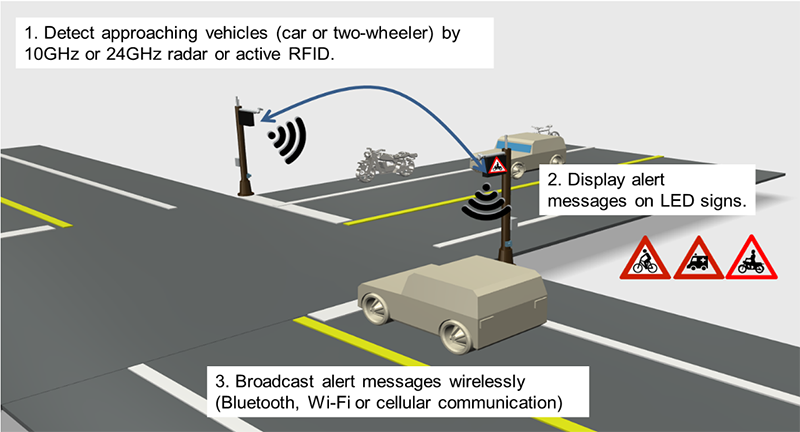 圖7 路口警示概念圖
圖7 路口警示概念圖
資料來源:資策會
此研發技術從過去就有多種技術方面的嘗試,從美規/歐規專用短距通訊(DSRC)的技術應用,到日規智慧運輸系統(ITS)V2X通訊的技術應用到現在成本較為低廉的無線射頻辨識系統(RFID)主動式發報應用皆有,並且透過路側雷達的方式協同式校準計算出較為精確的距離以及速度,提供路側較為準確的資料以供運算,希望能藉此發展適合於目前車輛產業以及ITS運用的技術標準。
圖8為目前單一路側柱之系統架構圖,由圖右方可見當感測器接收到資料後會透過通訊的方式傳遞給路側柱(Road Side Unit)上的決策盒,而決策盒演算後便會轉傳給所需警示之路側燈牌或是車機(On Board Unit)顯示,以此告知用路人可能發生的交通危害,進而提升用路人安全。
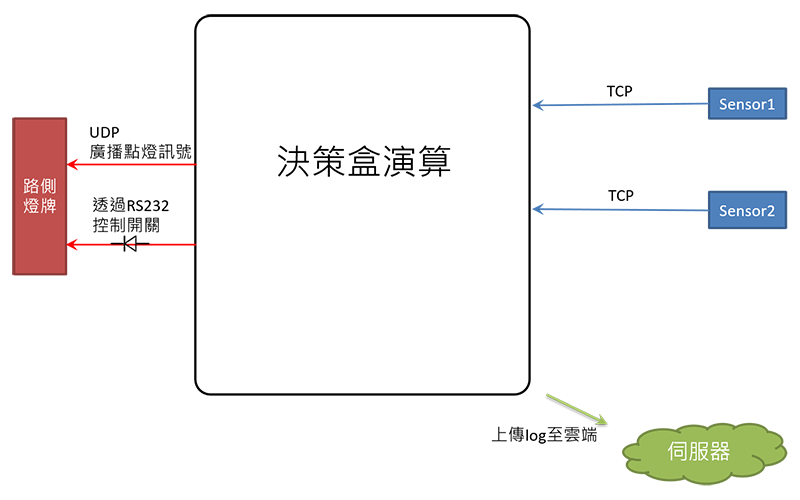 圖8 單一路側柱之系統架構圖
圖8 單一路側柱之系統架構圖
資料來源:資策會
所以面臨的挑戰不只有技術上的完成與突破,成本上以及市場的機制都是考量的一部分,而各個路口路型所需要的建置成本也不盡相同,如十字路口就需要有四根路側柱,所需要做的是側向來車的警示;而山區彎道路口則是減速以及轉彎的慢行警示,由於許多的交通事件發生在認知上的可行,也就是面對彎道時用路人會認為自己的速度能夠過彎,但實際上彎道的彎度比自己想得廣,因此就行駛到對向車道造成事故或危害,因此希望能藉此提供彎道警示,使用路人提前剎車減少過彎時速度過快的可能。
此二輪車之先進安全系統不僅止於在台灣推廣展示,也於2017年加拿大蒙特婁以及2018年丹麥哥本哈根的智慧運輸世界大會(ITS World Congress)參展亮相,展現國內自有研發的軟、硬整合實力,透過現場實體機車與路側系統展示,提升國際能見度,藉此帶動台灣在雲端服務業、路側設備業、無線通訊業等產業,掌握利基、行銷海外市場,促使台灣成為全球智慧路側設備關鍵產業鏈。
隨著資通訊技術快速發展,ITS是目前熱門的應用領域,將技術運用於解決智慧運輸相關議題,而台灣身處在交通運具相對多元複雜的亞洲地區,擁有絕佳的研發技術與場域,更適合發展二輪車的智慧運輸關鍵技術,政府除了支持技術與市場發展,同樣重視法規與建設的腳步,要使智慧運輸系統達到降低事故、解決塞車等目的。資策會目前亦著手進行深度學習影像辨識以解決混合車流之車流計算與安全警示所需要的移動軌跡與衝突預測。
隨著近年來科技進步之演變,智慧運輸乃目前全球熱門的科技焦點之一。自駕車越來越普及,自駕車之未來以及用路人安全都是ITS發展非常重要的領域。人工智慧將加速自駕車的發展進程,以自駕車為中心發展的數位服務,將成為未來汽車產業的營收重心,自駕車如何在複雜混合車流的台灣道路安全行駛,需要能夠適應大量機車的道路環境。然而,若相關產業不能及時適應自動駕駛生態帶來的諸多變化,將會在這波數位轉型的浪潮中淘汰。究竟智慧交通將如何使整體社會更加安全,自動駕駛將對人類帶來哪些衝擊,而國內業者將如何在國際上為台灣打造自駕車版圖市場,是值得國內產官學研共同探討的課題。
(本文由台灣資通產業標準協會提供,作者為資策會智慧系統研究所副所長)