近期,伽利略(Galileo)系統的測試衛星GIOVE-A已經部署完成,並展開導航訊號的測試工作。隨著伽利略計畫的逐項展開,三十顆伽利略衛星將會逐步被歐洲太空局(Europe Space Agency, ESA)發射至預定的軌道並展開服務。按照歐盟的時間表,整個伽利略系統將會在2009年底之前完成部署工作,並於2010年正式提供初始運作能力(Initial Operation Capability, IOC)。
截至目前為止,已經有許多全球衛星定位系統(GPS)晶片設計業者,開始投入GPS/伽利略雙模接收機的設計工作,並讓相關產品陸續問世,一旦伽利略系統正式提供服務,消費者便能很快享受到伽利略系統所帶來的利益。目前解決方案只會在GPS系統模式之下,但當伽利略系統正式提供服務之後,消費者只須透過網路下載更新的韌體,即可將接收機升級為GPS/伽利略雙模接收機。各種衛星導航系統的發射和現代化時程表如圖1。
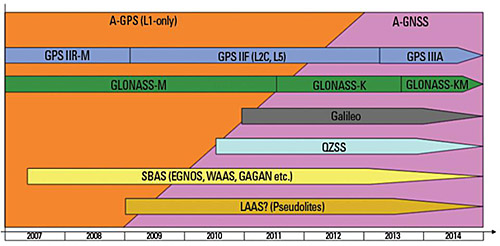 |
| 圖1 各種衛星導航系統的發射和升級的時間表 |
伽利略展頻碼耐人尋味
本文將描述如何產生伽利略L1頻段的OS訊號(Galileo L1 OS Signal)。茲將伽利略L1 OS訊號的重要系統參數詳列如下:
每一顆伽利略衛星在L1頻段所使用的展頻碼,是由一個縮短的金氏碼(Truncated Gold Code)所產生的。較高的碼片率(Code Rate)會提供較佳的精確度,較長的碼可以降低互相關(Cross-correlation)的干擾,但會付出較長的擷取時間。L1頻段所使用的測距碼(Ranging Code)為:
因為BOC(1,1)調變的關係,所以子載波(Sub-Carrier)的頻率為1.023MHz。頻道C所使用的展頻碼是由一個長度為4,092( )的主碼(Primary Code)和長度為25(
)的主碼(Primary Code)和長度為25( )的副碼(Secondary Code)所構成。主碼是一個縮短的金氏碼,金氏碼產生器的輸出達到4,092碼片時,暫存器將會被重置為初始狀態。副碼會調變特定的主碼二十五次,因而產生長度為102,300(4,092×25)的碼,稱為階梯碼(Tiered Code)。對每一個用戶來說,所有的衛星傳送相同的副碼,副碼的十進位表示是34012662。若主碼的碼片率為
)的副碼(Secondary Code)所構成。主碼是一個縮短的金氏碼,金氏碼產生器的輸出達到4,092碼片時,暫存器將會被重置為初始狀態。副碼會調變特定的主碼二十五次,因而產生長度為102,300(4,092×25)的碼,稱為階梯碼(Tiered Code)。對每一個用戶來說,所有的衛星傳送相同的副碼,副碼的十進位表示是34012662。若主碼的碼片率為 ,則副碼的碼片率為
,則副碼的碼片率為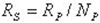 。圖2所示為階梯碼的產生原理。
。圖2所示為階梯碼的產生原理。
 |
| 圖2 階梯碼的產生原理 |
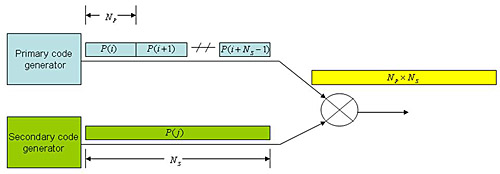
在伽利略系統資料頻道的展頻碼週期會等於一個資料符碼(Symbol)的週期,在導航頻道中展頻碼的週期為100毫秒。較長導航頻道的週期可以改善互相關的屬性和增加頻道間的隔離,以決定可以使用的訊號的動態範圍和加強對雜訊以及干擾的抑制。主碼主要是用來作為訊號的快速取得,而主碼加副碼則主要是作為訊號的追蹤。圖3所示為L1頻段導航資料、主碼和副碼在時間上的相對關係。
 |
| 圖3 L1F導航資料、主碼和副碼在時間上的關係 |
伽利略系統訊息結構有優勢
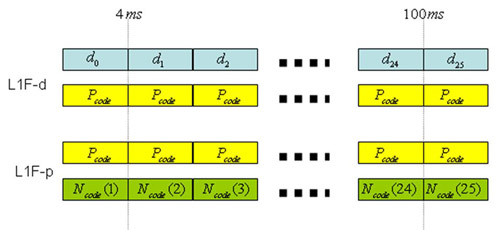
接下來概述伽利略系統的訊息結構(Message Structure)。訊息是由訊框(Frame)所構成,而訊框則是由數個子訊框(Subframe)所構成。每一個子訊框則是由數個頁(Page)所組成,Page是構成導航訊息的基本單位。一個Page是由下列的資料區塊所構成:
對L1 OS訊號,同步字固定為10個位元。
全部都是邏輯0,主要是用來重置前向糾錯編碼器(Forward Error Correction, FEC)。導航訊息的架構如圖4。
 |
| 圖4 導航訊息的架構 |
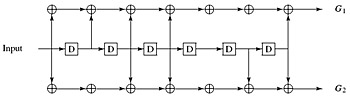
圖5所示為伽利略系統所採用的維特比(Viterbi)迴旋編碼器(Convolutional Encoder)的架構。對所有資料頻道的維特比迴旋編碼器都是相同的,所使用的參數如下:
從圖5中可以發現,G1在1、4、5、6和7具有抽頭連結至Modulo-2的加法器。G2則是在1、2、4、5和7具有抽頭連結至Modulo-2加法器。
 |
| 圖5 伽利略系統的資料頻道所使用的維特比迴旋編碼器 |
在維特比迴旋編碼之後,資料符碼會進行交錯(Interleaving)的程序。交錯的目的是用來增加迴旋編碼的效率,藉由將叢發式的錯誤散布在數個資料符碼上,可以增加接收機維特比解碼的強健度。一般來說,交錯都是利用一個二維的緩衝陣列(Buffer Array),將資料以「列」的方式寫入緩衝陣列中,之後再以「行」的方式將資料從緩衝陣列中讀取。對車用GPS接收機而言,在移動的情況中,因鄰近建築物所引起的接收錯誤類型,大都是屬於叢發式的錯誤,因此利用交錯的程序來增加接收機對叢發式錯誤的抵抗力,對可攜式導航裝置(PND)來說,是一項相當有效的方式。
伽利略系統的訊號架構比起目前的GPS訊號具有不少優點,舉例來說,因為伽利略的訊號功率比起目前GPS訊號功率要大上兩倍,因此可以降低在相位和碼的追蹤雜訊。而每一個伽利略訊號包含一個稱為導引頻道(Pilot Channel)的無資料(Dataless)頻道,此頻道可以輕易從資料位元的解碼中獨立取得。導引頻道將有助於在失去衛星訊號之後,快速重新取得(Re-acquisition)相位,因此相較GPS接收機,伽利略接收機具有相對較快速的相位重新取得的能力。
此外,伽利略訊號具有較新的調變架構,因此可以降低追蹤雜訊和多重路徑的影響,E5頻段所使用的altBOC調變具有相當低的雜訊屬性。且伽利略系統在導航位元中加入三階段的編碼,包括維特比編碼、CRC檢查和位元交錯。利用此三階段的編碼可以增加導航位元在有干擾源存在和弱訊號區時解碼的強健度和可靠度。
伽利略接收機設計考量繁雜
伽利略L1 OS訊號接收機的設計考量,基本上類似於GPS訊號,因此伽利略L1頻段接收機的架構也會類似於GPS接收機的架構。可以利用下列公式來表示接收到的伽利略L1 OS訊號:

 :接收到的訊號功率
:接收到的訊號功率
 :傳輸延遲(訊號旅行時間)
:傳輸延遲(訊號旅行時間)
 :載波頻率的位移(都普勒頻率)
:載波頻率的位移(都普勒頻率)
 :訊號的相位
:訊號的相位
 :資料頻道
:資料頻道
 :導引頻道
:導引頻道
從接收到的訊號 ,伽利略接收機的任務就是要找出、和。第一階段主要是作訊號的擷取,在此階段主要是找出所有可視衛星的和。假如可以找出每顆衛星的,此訊號的搜尋稱為同相訊號追蹤(Coherent Signal Tracking)。若載波相位被忽略,則此搜尋稱為非同相追蹤。在接收機的碼追蹤迴路(Code Tracking Loop)就是用來估算的值,主要是利用延遲鎖定迴路(Delay Lock Loop, DLL)來實現。對同相的DLL來說為0。為了解調變接收到的訊號以還原導航資料,一般都是利用鎖相迴路來移除。
,伽利略接收機的任務就是要找出、和。第一階段主要是作訊號的擷取,在此階段主要是找出所有可視衛星的和。假如可以找出每顆衛星的,此訊號的搜尋稱為同相訊號追蹤(Coherent Signal Tracking)。若載波相位被忽略,則此搜尋稱為非同相追蹤。在接收機的碼追蹤迴路(Code Tracking Loop)就是用來估算的值,主要是利用延遲鎖定迴路(Delay Lock Loop, DLL)來實現。對同相的DLL來說為0。為了解調變接收到的訊號以還原導航資料,一般都是利用鎖相迴路來移除。
伽利略接收機設計的一項關鍵項目,就是如何處理BOC調變的測距訊號。在GPS接收機中,相關器(Correlator)的主要功能是作為偽距離(Pseudorange, PR)的估算。標準GPS接收機的相關器,主要是針對BPSK調變的訊號,而伽利略接收機的相關器在L1 OS訊號所要面對的則是BOC(1,1)調變的訊號。一般在伽利略接收機所採用的相關器,其架構非常類似於在GPS系統所使用的相關器。使用在伽利略接收機相關器架構如圖6。
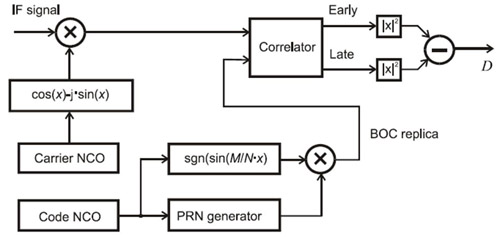 |
| 圖6 伽利略接收機所使用的相關器 |
本地所產生的測距碼
和數位載波

相乘之後所產生的訊號
被用來作為解展頻。公式如下:

圖7為伽利略接收機所使用的BOC延遲鑑別器(Delay Discriminator)的特性。BOC延遲鑑別器的特性可以利用遲早門(Early-Late Gate)的振幅鑑別器(Amplitude Discriminator)和功率鑑別器(Power Discriminator)來描述。振幅鑑別器是將早門(Early Gate)的振幅減去遲門(Late Gate)的振幅,公式如:
而功率鑑別器則是將早門的功率減去遲門的功率,公式為:

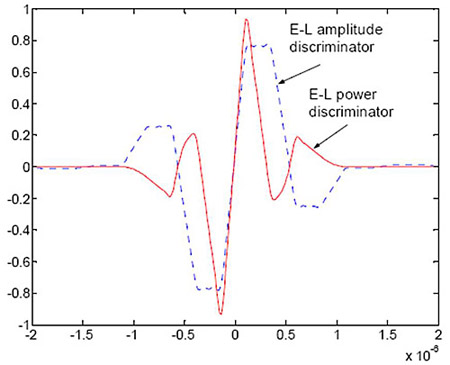 |
| 圖7 BOC延遲鑑別器的特性 |
BOC相關器的一個主要問題在於,若超過一個以上的穩定節點存在於鑑別器,越高階的BOC調變就會存在越多的穩定節點。在同相延遲鑑別器中錯誤的穩定節點的數目可以利用下列公式來得到:
其中M和N分別為BOC(M,N)。BOC(1,1)鑑別器的穩定和不穩定節點的分布如圖8。
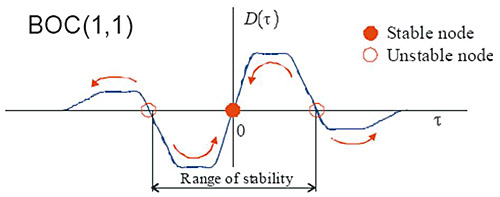 |
| 圖8 BOC(1,1)鑑別器的穩定和不穩定節點的分布 |
不穩定節點會導致延遲鎖相迴路穩定範圍的降低,越高階的BOC調變會造成越小的延遲鎖定環穩定範圍。DLL有可能會誤將不穩定節點當成穩定節點去追蹤,這種對不穩定節點的追蹤對BOC調變來說極為嚴重。
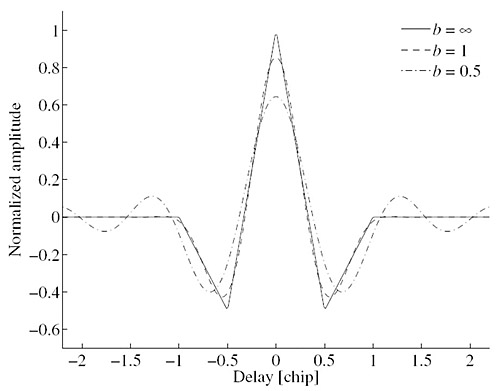
對BPSK調變的訊號,一般在碼相位(Code Phase)維度上搜尋的刻度(Scale)為0.5個碼片。0.5碼片的刻度會導致1.15dB的自相關(Auto-correlation)損失。增加搜尋的解析度到0.25碼片可以降低自相關損失,但是會延長搜尋的時間或增加相關器的數目。對BOC(n,n)訊號的自相關函數(Auto Correlation Function, ACF)且具有b的頻寬,可以用下列公式來表示:

其中
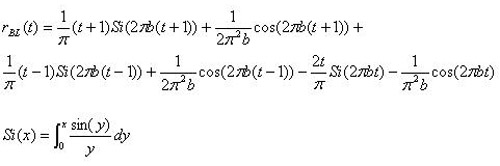
圖9為利用上述公式所計算出來的BOC(1,1)自相關函數。在圖9中將正規化的頻寬分別設為無限大(移除基頻濾波器)、1(零點對零點的頻寬)和0.5(旁波束的頻寬)。
 |
| 圖9 BOC(1,1)鑑別器的穩定和不穩定節點的分析 |
從圖9中可以發現,在BOC(1,1)自相關之後會產生三個峰值。為了要達到自相關的損失能夠和BPSK系統相抗衡,在碼相位的解析度必須增加至0.16個碼片。在0.16個碼片的解析度之下,自相關的損失為1.17dB。伽利略L1 OS訊號所使用的主碼長度為4,092,在解析度為0.16碼片之下,所須掃描的碼相位空間為24,552,GPS BPSK訊號所須掃描的空間則是8,184。由上述的計算結果,可以得知,在碼相位空間的訊號擷取,GPS系統比起伽利略系統而言,只需要三分之一的訊號擷取時間。為了要實現相同的訊號擷取時間,在伽利略的BOC(1,1)接收機必須裝置三倍的相關器,才能應付在碼相位空間上三倍的解析度增加。
至於在伽利略E5頻段上,altBOC接收機的設計考量(Design Consideration for Galileo E5 Band altBOC Receiver)則有所不同。在E5頻段,伽利略接收機要面對altBOC(15,10)調變的訊號。altBOC調變的特色在於E5a(I和Q)和E5b(I和Q)可以被獨立處理,此時的altBOC(15,10)調變可以等校為BPSK(10)的調變。E5a和E5b的訊號也可以一起處理,而發揮altBOC在追蹤雜訊和多重路徑上面的優異性能。
可以利用下列公式來表示altBOC的訊號。

其中
 :E5b資料頻道(E5bI)的PRN碼
:E5b資料頻道(E5bI)的PRN碼
 :E5a資料頻道(E5aI)的PRN碼
:E5a資料頻道(E5aI)的PRN碼
 :E5b導引頻道(E5bQ)的PRN碼
:E5b導引頻道(E5bQ)的PRN碼
 :E5a導引頻道(E5aQ)的PRN碼
:E5a導引頻道(E5aQ)的PRN碼
 :E5b資料頻道的導航位元
:E5b資料頻道的導航位元
 :E5a資料頻道的導航位元
:E5a資料頻道的導航位元
 :E5a和E5b頻段的子載波調變
:E5a和E5b頻段的子載波調變

 :中心載波率為1191.795 MHz
:中心載波率為1191.795 MHz
導引訊號並不包含資料成分,因此公式中的 和
和 為0。altBOC(15,10)導引訊號可以利用下述公式來表示:
為0。altBOC(15,10)導引訊號可以利用下述公式來表示:

altBOC(15,10)的解調變就是將 分別乘上各自的複數共軛(Complex Conjugate)對。例如要解調變出E5b的導引訊號便是將乘上
分別乘上各自的複數共軛(Complex Conjugate)對。例如要解調變出E5b的導引訊號便是將乘上 ,而要解調變出E5a的導引訊號便是將乘上
,而要解調變出E5a的導引訊號便是將乘上 。解調變之後的E5a和E5b訊號可以利用下列公式來表示:
。解調變之後的E5a和E5b訊號可以利用下列公式來表示:
 :訊號的累加時間(Integration Time)
:訊號的累加時間(Integration Time)
 :碼片的週期(m)
:碼片的週期(m)
:數位中頻的輸入訊號和本地產生的子載波和碼的延遲
因為同相性的關係,所以我們可以直接將 和
和 直接相加得到解調變之後的E5頻段的訊號如下列公式所示:
直接相加得到解調變之後的E5頻段的訊號如下列公式所示:

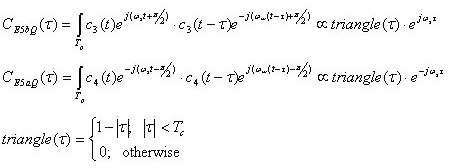
圖10所示為altBOC(15,10)在不同訊號頻寬之下的自相關峰值。
 |
| 圖10 altBOC(15,10)在各種不同基頻頻寬之下的自相關峰值 |
從圖10中可以發現,altBOC(15,10)自相關的峰值在各種不同的頻寬之下差異並不大。增加基頻濾波器的頻寬的唯一好處就是可以增加接收到的訊號的功率。
要處理寬頻的altBOC(15,10)訊號,伽利略接收機面臨了幾項挑戰。首先,是整個E5頻段的訊號都必須經由相同的RF/IF電路降頻至基頻或低中頻,在只考慮主波束的情況下,最小的基頻訊號頻寬為50 MHz。非常寬的基頻訊號頻寬將會導致非常高的取樣頻率。一般在GPS接收機所使用的取樣頻率大抵為16.368MHz,但在伽利略altBOC(15,10)接收機,假設四倍頻取樣所需的取樣頻率將高達200MHz。
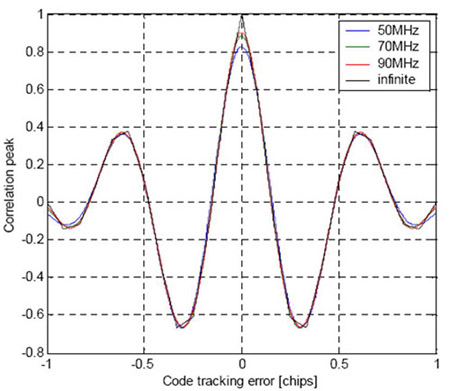
其次,因為複數altBOC(15,10)調變的特色,因此基頻訊號處理比起簡單的BPSK調變要複雜許多。圖11所示為一個簡單的altBOC(15,10)接收機的區塊圖。
 |
| 圖11 altBOC(15,10)接收機的區塊圖 |
從圖11可以發現,一個altBOC(15,10)接收機的架構類似於傳統的GPS BPSK接收機,主要的差異在於所有的區塊都是複數形式。複數的altBOC(15,10)訊號產生器會產生altLOC基頻訊號的複數共軛的量子化版本,也就是數位表示式。而altLOC基頻訊號就是。由於E5a和E5b頻段的同相性,因此可以使用相同的碼數值控制振盪器(Numerically Controlled Oscillator, NCO)在兩個頻段上面。
對BPSK、BOC和altBOC的碼追蹤雜訊的標準差,可以利用下列公式來表示:
其中
 :遲早門的間距(以碼片為單位)
:遲早門的間距(以碼片為單位)
 :自相關的峰值(Correlation Peak)
:自相關的峰值(Correlation Peak)
 :當
:當 時,自相關峰值的斜率。
時,自相關峰值的斜率。
對沒有濾波的BPSK調變訊號 值為1,altBOC(15,10)調變的訊號且基頻濾波器的頻寬設為70MHz,遲早門間距為0.3個碼片時,值為9。可以發現altBOC(15,10)比起BPSK具有較陡峭的自相關峰值,因此具有較佳的追蹤性能。
值為1,altBOC(15,10)調變的訊號且基頻濾波器的頻寬設為70MHz,遲早門間距為0.3個碼片時,值為9。可以發現altBOC(15,10)比起BPSK具有較陡峭的自相關峰值,因此具有較佳的追蹤性能。
 :DLL迴路的頻寬(Hz)
:DLL迴路的頻寬(Hz)
:訊號的累加時間(Integration Time)
 :載波對雜訊的比值(dB-Hz)
:載波對雜訊的比值(dB-Hz)
:碼片的週期(m)
 :光速
:光速
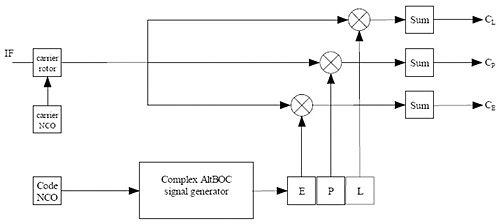
altBOC(15,10)調變具有非常優異的碼追蹤的雜訊。圖12所示為在不同的C/N值之下碼追蹤雜訊對各種不同調變的關係。從圖12中,可以發現GPS的BPSK具有最差的碼追蹤雜訊而altBOC(15,10)條變則具有最優異的碼追蹤雜訊的性能。
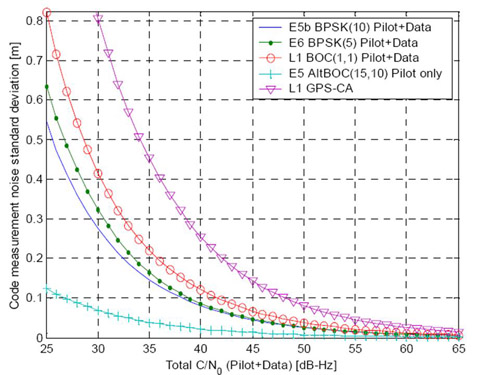 |
| 圖12 在各種不同C/N值之下各種調變型態的碼追蹤雜訊 |
altBOC(15,10)調變在載波追蹤雜訊性能方面比起傳統GPS的BPSK調變並沒有太優異的表現。就像BPSK的訊號一樣,altBOC(15,10)調變的載波追蹤雜訊可以用公式來表示:
:PLL迴路的頻寬(Hz)
:訊號的累加時間(integration time)
:載波對雜訊的比值(dB-Hz)
 :載波的波長(m)
:載波的波長(m)
因為E5a和E5b頻段具有同相性,因此可以將E5a和E5b的訊號同相相加便可以獲得額外的3dB的,利用此種方式可以將雜訊的變異數降低一半。
雙模接收機日益當紅
隨著全球導航衛星系統(Global Navigation Satellite System, GNSS)的持續成長,衛星的數目、頻率和調變方式也更加多元化。接收機的設計者除了要面對多頻段多模式的接收之外,還要能兼顧功耗、價格、晶片大小和硬體的複雜度,因此所面臨的挑戰比起過往的純GPS接收機要複雜許多。增加額外頻段的接收所產生的技術瓶頸較高,因為除了要增加額外的追蹤頻道(Tracking Channel)來處理較多的衛星之外,在射頻(RF)前級必須再增加一些硬體來處理額外的頻段,且雙頻接收機的天線設計也是一大考驗。
目前GPS/伽利略雙頻/雙模接收機(GPS/Galileo Dual Band Dual Mode Receiver)的設計傾向在L1頻段可以同時接收GPS和伽利略L1 OS訊號。雙頻雙模式GPS/伽利略接收機被視為是在所有環境之中,具有最佳定位精準度和強健度的接收模式,即使是三頻的伽利略接收機,其接收效果還是無法達到雙頻雙模式的GPS/伽利略接收機的接收效果。
伽利略/GPS L1/E5a雙頻雙模接收機,一般被視為是未來兩三年之後GNSS接收機的主流。使用這兩個頻段的主要理由是L1和E5a頻段都是GPS和伽利略系統共存的,另外,這兩個頻段具有最大的頻率間隔。使用L1和E5a的雙頻接收機最大可以同時追蹤十二顆GPS衛星和十二顆伽利略衛星。另一個優點則是使用這兩個頻段可以簡化天線的設計,使用在GPS L1/E5雙頻接收機的天線也可以用在GPS/伽利略 L1/E5a雙頻雙模式的接收機上面。
在RF和類比前級部分(Analog Front-end, AFE),雙頻雙模式架構比起傳統單頻單模式的GPS接收機要來得複雜。為了要支援雙模接收,基頻濾波器的頻寬設計必須可以透過軟體調整。傳統GPS接收機基頻濾波器的頻寬,都是介於2M~2.5 MHz之間,為了要容納較高頻寬的伽利略L1 OS訊號,因此基頻濾波器的頻寬必須要能支援4MHz或8MHz的頻寬。對支援altBOC解調變E5頻段的伽利略接收機來說,其最大挑戰在於基頻濾波器的頻寬必須達到90MHz。但根據模擬的結果顯示,基頻濾波器的頻寬只要達到altBOC(15,10)頻譜的主波束(Main Lobe),其頻寬就能達到幾乎和全頻寬相當的性能,因此未來的altBOC接收機基頻濾波器的主波束頻寬可以降低至50MHz,以減輕設計的困難度。
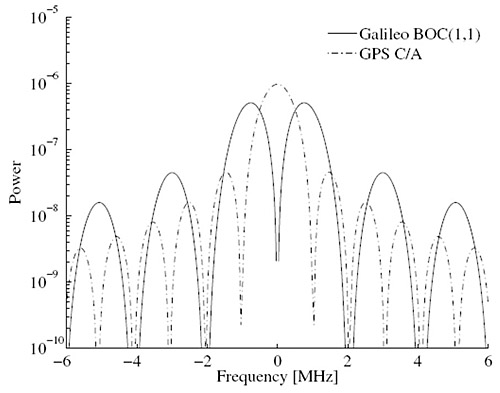
圖13所示為GPS C/A碼和伽利略BOC(1,1)的頻譜。GPS L1 C/A碼和伽利略L1 OS訊號的BOC(1,1)碼的中心頻率皆為1,575.42MHz。
 |
| 圖13 GPS C/A碼和伽利略L1 OS訊號所使用的BOC(1,1)碼的頻譜 |
從圖13可以發現,伽利略訊號零點到零點的頻寬(Null-to-null Bandwidth)為GPS C/A碼的兩倍。一個有趣的現象就是在載波頻率1,575.42 MHz上,BOC(1,1)並沒有訊號的成分存在。這主要是因為子載波調變會將傳統的BPSK頻譜分割成以載波頻率為中心點,呈對稱分布的兩個旁帶(Sidelobe)。利用此種特色,雙模接收機可以輕易區分GPS C/A碼的訊號和伽利略L1 OS訊號。
另外,在頻率合成器(Synthesizer)部分,考量到較寬廣的參考頻率的選擇一般都會使用Fractional-N型式的頻率合成器。在低雜訊放大器(Low Noise Amplifier, LNA)、混波器、自動增益控制(Automatic Gain Control, AGC)和類比數位轉換器的部分,基本上都類似於傳統的GPS接收機架構。
綜合以上所述,伽利略接收機和GPS接收機相較,伽利略雖可處理較多的訊號,但也同時增加硬體的複雜度和微處理器的負擔。在新調變和多工架構方面,也讓晶片設計商必須多花一些時間了解伽利略系統的訊號處理;不過十倍長的碼,又具有較高的資料率與頻寬,仍有助於訊號擷取。至於在多重路徑的抑制上,其本質具有較佳的性能來抑制多重路徑,如較大的頻寬和BOC,但是仍有較高機率產生錯誤擷取和追蹤。而利用導引訊號(Pilot)則可改善靈敏度。關於軟/硬體邊界議題,較多的頻道、較高資料率、維特比解碼與解交錯(Deinterleaver),都導致叢發式的CPU負載、較複雜的軟體以及可能需要多處理器系統或專屬硬體加速器。