工廠自動化及總體效率的提升,是現今製造業的主要發展焦點。許多工廠正在朝這個方向發展,原因不只是為了提高其底線,同時也有助於降低或消除設備停機所導致的重大成本耗損。製程控制與預期性維護程式開發者可以利用無線振動感測器來實現精確的即時分析與控制,而無須仰賴先進的方法並利用統計資料以做出維護需要的預測,或者只是去僱用受過更好訓練的技師。
精密的工業製程(圖1)對於馬達與相關機械的效率和恆定運作的仰賴度日益提高。機械中的失衡、缺陷、鬆動的接頭以及其他異常,通常都會轉換成振動與精密度的失常,以及安全性的顧慮與缺乏效率的性能。
 |
| 圖1 工廠內的製程控制與維護自動化;針對無線感測網路的高價值目標。 |
當這些狀況未獲得處理,導致設備必須從生產線上離線而加以修復時,生產力的降低就會變得無法避免。即便是設備性能上的輕微變動(這往往很難以適時的方法加以預測)都會快速地轉換成生產力的重大損失。
以製程監測與調整為基礎的預測性維護已經廣為所知,而且也已經是獲得認可用以避免生產力降低的方案,但這些方案的價值與複雜性也是對等的。現存的方法有其限制,特別是當其須要分析振動資料(無論這些資料是如何蒐集而得的)與隔離誤差來源時。
典型的資料蒐集方案包含手持式資料蒐集工具以及附著於機械上的簡單壓電式(Piezo-based)感測器。這些方法都具有許多的限制,特別是與能夠嵌入機械當中而且自動運作的完全偵測與分析系統這類型理想解決方案相比較時。在執行一個完整、嵌入式與自動化的感測系統之前,了解並且考量會影響資料蒐集程序的十項因素是相當重要的,其範圍從高重複性的量測一直到適當的文件建立與可追溯性。接著,分別說明這十項會影響資料蒐集程序的因素。
精確與重複量測
 |
| 圖2 目前使用於設備振動偏移監測的手動探棒方法缺乏重複性與可靠性。
|
現有的手持式振動探棒(圖2)具有一些執行上的優點。它不須要針對終端設備做任何的修改。此外,手持式探棒實際上具有相對較高的整合性,這是因為它們的大型尺寸(磚型)可以因應充分的處理與儲存。
然而,其一項主要的缺點是缺乏重複性的量測。探棒位置或是角度上的輕微差異,都會產生出不一致的振動特性,使得時間的比較出現不正確的結果。因此,維護技師會對於所有觀察到的振動偏移究竟是因為機械內部的實際變化所造成,或僅只是量測技術上的一個改變所導致而產生疑惑。
在理想狀態下,感測器要既精巧又具有充分的整合性,能夠直接而且恆常地嵌入於設備當中,進而消除任何對於量測位置偏移的顧慮,並且提供量測排程計畫上的完整彈性。
量測頻率與排程
在一個高價值設備如生產高靈敏電子元件之類的生產設施中,製程監測可能會特別具有其價值。在此例子中,組裝線中的微小偏移,不僅可能造成工廠輸出的下降,甚至會導致嚴重的終端設備規格偏移。
手持式探棒方案有一項明顯的限制,那就是欠缺對於不正確振動偏移的即時通報。這點同樣適用於大多數壓電式感測器,因為它們通常都具有非常低的整合度,將資料轉移至他處以便稍後進行分析,而傳感器(Transducer)只有在某些情況下才會發生。
這些裝置須要外部的介入,但也因而造成漏失事件與偏移發生的機會。相對地,包含了感測器、分析、儲存以及警報功能,並且具有小巧外形尺寸的自動化感測器處理系統,能夠提供最快速的振動偏移通報,並具有顯示以時間為基礎趨勢的最佳能力。
了解資料
來自於嵌入式感測器的即時通報,只有在採用頻率域分析時才能夠實現。任何特定的設備通常都會有多個振動的來源如軸承缺陷、失衡、齒輪咬合等,其中也包括經過設計的來源,例如會在標準作業期間產生振動的鑽孔或是機械壓擠等。
對於設備以時間為基礎的分析會產生出複雜的波形,結合這些多重來源並在快速傅立葉轉換(FFT)分析之前提供少許可識別資訊。大部分壓電式感測器解決方案須要仰賴外部的快速傅立葉轉換運算與分析。這不僅會使即時通報無法實現,同時也會為設備開發者帶來大量額外的設計負擔。
透過在感測器上的嵌入式快速傅立葉轉換分析,振動偏移可以被立即與特定的來源加以隔離。增加一組完全整合型感測器,也可以為設備設計者減少6至12個月的開發時間,依據完全整合與自動化感測器的完整性與簡易性而定。
資料存取與傳輸
雖然嵌入式感測是一種實現精確而且即時趨勢資料的理想方法,但是它會讓轉換資料給遠端製程控制器或是操作員的工作複雜化。嵌入式快速傅立葉轉換分析會假設類比感測器資料已經過調整,並且轉換為數位化以便支援簡化的資料傳輸。
事實上,目前所使用的大部分振動感測器解決方案都只有類比輸出,這會導致訊號在進行傳輸以及複雜的離線資料分析時發生降級的狀況。有鑑於需要振動監測的多數工業設備大多存在於嘈雜、移動、無法存取,甚至是危險的環境中,因此降低連結電纜的複雜性並且盡可能地在來源處執行更多的資料分析的確有其強烈的需要,藉以擷取最為精確的設備振動表現。
具無線功能的感測器節點不僅有助於立即地存取,同時也能大幅地簡化感測器網路的部署,以顯著降低的成本。
資料方向性
許多現有的感測器解決方案都是單軸壓電式傳感器。這些壓電感測器提供的是無方向性的資訊,因此對於設備振動特性的了解會有所限制。
缺乏方向性會變成須要利用非常低雜訊的感測器來實現所需要的識別能力。使用以微機電系統(MEMS)為基礎的多軸感測器,能夠在隔離來源的能力上獲得顯著的提升,同時也能夠潛在性地降低成本。
感測器位置與分布
依據設備的材料與位置而定,設備振動的特性是複雜的、隨時間移位,而且容易受到變數影響的。要在何處設置感測器的問題固然非常地重要,但同時也須要相當注意設備的類型、環境,甚至設備的生命週期等。如果藉由高成本的感測器元件將探棒點的數量限制在一個或是少量,這個問題就會更加嚴重。此意味著若不是需要顯著的額外前置開發時間以透過實驗來決定最佳設置點,要不就是(大部分情況下)犧牲所要擷取資料的品質與數量。
只需要目前成本的一小部分而且更具完全整合型感測器探棒的出現,能夠實現在每個系統內多重探棒的設置,並且減少前置開發時間與成本。而另一個選項則是使用較少而且較低成本的感測器。
適應生命週期的偏移
雖然手持式監測系統方案或許可以隨著時間而針對變化(週期性、資料量等)加以修改,但是要在嵌入式感測器中提供具有相同生命週期基礎的客製化服務,就必須在設計與部署期間的前置階段即加以注意,以便提供必要的調整能力。
傳感器元件(不論其技術為何)當然非常的重要,但是環繞著傳感器的感測器的調整與處理,其實往往更加地重要。訊號與感測器的調整和處理,不僅只是針對特定設備而設定,同時也要適應設備的生命週期。這將會轉化成數個在感測器設計上的重要考量。
首先,較早期的類比數位轉換(也就是感測器端頭相對於設備之外)允許在系統中進行組態設定與調整。理想的感測器會提供簡單的可編程介面,使設備的設定透過將濾波功能的快速底線資料擷取操作、警報的編程,以及藉由不同感測器位置的實驗等而加以串流。
使用現有的簡單感測器,就必須在部分的感測器設定方面加以妥協,以便適應設備生命週期內之維護考量上的變化。舉例來說,設計者須要判定感測器是否應該要針對設備故障發生機率較低的生命週期前期,或是故障不僅可能發生而且還可能會更加有害地在末期進行組態設定。
性能偏移/趨勢辨識
較常被採用的方案是將組態設定為能夠在生命週期內改變的系統內可編程感測器。例如,在生命週期的前期應該使用相對較少的監測(為了使功率耗損降至最低);接著,一旦觀察到偏移(警告臨界值)產生,就重新將組態設定為較經常地(使用者編程的期間)進行監測。
讓感測器遷就設備生命週期的變化,有部分是須要依據對於底線設備響應的相關知識而定。假設操作員進行測量,執行離線分析,並且在離線狀態下儲存這項資料,然後以某種方式適當地標記到特定的設備與探棒位置上,這樣即使是簡單的類比感測器也能夠達成此任務。
有一個較常被採用而且比較不會出錯的方案,能夠讓底線快速傅立葉轉換儲存在感測器頭端,如此將可以消除任何資料錯置的潛在問題。底線資料也有助於警報位準的建立,其同時也相當適合在感測器內直接加以編程。因此,在任何後續的資料分析與擷取當中只要有警示或故障狀況被偵測到,就會發出即時的中斷。
資料可追溯性與文件建立
在工廠內,一個適當的振動分析程式可以監測數十個甚至數百個位置,無論是手持式探棒或是嵌入式感測器。在設備生命週期的某一區段期間,可能會產生出擷取數千筆記錄的需求。
預測性維護程式的整合,必須仰賴適當之感測器蒐集點的位置與時間對應。為了使風險降到最低以及取得最具價值的資料,感測器除了嵌入式儲存外,還應當具有獨立的序號,以及可以在資料中加入時間戳記的能力。
可靠性
以上的討論強調了針對製程控制與預測性維護相關的振動監測方面,以感測器為基礎的現有方案的改善方法。本著容錯與監測的精神,感測器本身應該也要被詳加檢視。假如是感測器發生故障(性能偏移)而非設備本身時該如何呢?或者,以完全自動化的感測器運作時,對於感測器的持續運作,能夠有多少的信任度呢?
使用許多如壓電型傳感器,將會出現一項嚴重的限制,因為它們無法提供任何類型的系統內自我測試。隨時間所記錄的資料一致性一直讓人缺乏信心,而在生命週期末期非常重要的監測相位,如即時故障通報相當的耗費時間與成本(更別提明顯的安全性問題),總是會讓人擔心感測器可能會無法正常運作。
高可信度製程控制程式(High Confidence Process Control Program)有一項必要的需求,就是能夠讓傳感器遠端自我測試的能力。很幸運的是,這已經能夠利用一些以MEMS為基礎的感測器來加以實現。嵌入式數位自我測試為可靠的振動監測系統彌平了最後的一道鴻溝。
亞德諾(ADI)推出具有嵌入式射頻(RF)收發器的ADIS 16229數位MEMS振動感測器,是完全自動化與無線頻域振動監測器的一個範例。ADIS 16229具有嵌入式頻域處理能力、一組512點的實際值快速傅立葉轉換以及內建的儲存,提供辨識與分類個別振動來源的能力,監測它們隨著時間的變化,並且對可編程臨界值位準加以反應。
因應問題需要更快與更精確偵測,該元件提供組態可設定的光譜警示波段以及多窗口技術選項,讓完整頻譜的分析得以透過六個波段的組態設定,以及兩組警示(警告臨界值與故障臨界值)而加以實現。另外,亞德諾專屬的862/928MHz無線通訊協定介面使ADIS 16229感測器節點能夠設置在遠端,而且受到獨立閘道節點ADIS 16000的支援(圖3),後者可提供標準序列周邊介面(SPI)給任何系統控制器裝置。如同圖4中所描繪的,高達六組的遠端感測器節點能夠透過閘道而加以控制。
 |
| 圖3 以MEMS為基礎的感測器節點(ADIS 16229)以862/928MHz的射頻連結至閘道控制器(ADIS 16000) |
總歸來說,完全整合與可靠的振動感測器能夠為製程控制與預期性維護程式開發者提供可以顯著改善品質與資料蒐集程序整合性的能力,而不會有以往振動分析方案所帶來的分析限制與妥協。
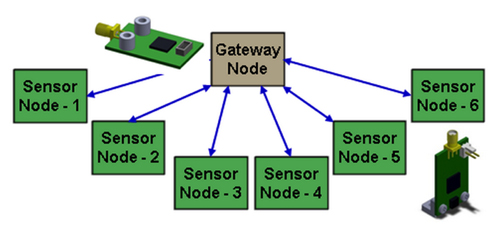 |
| 圖4 6組遠端感測器節點,可自動化偵測、蒐集與處理資料,並且無線傳輸至中央控制器節點。 |
藉由高整合度與簡化型可編程無線介面,這些感測器也能夠實現更具滲透性的振動感測部署。像這類完全整合型感測器,由於不需要依賴翻新的布線/基礎架構,而且可以更精密與可靠的偵測出性能的偏移,因此能夠提供徹底降低前置與循環維護成本的機會。
(本文作者任職於亞德諾)