2018年期間各大廠商陸續推出自駕叫車或配送服務,例如Waymo、百度已推出自駕叫車商用服務;而配送服務則是由Kroger攜手Nuro,於斯科茨代爾(Scottsdale)使用自駕車,為居民提供運送雜貨的服務,正式揭開自駕車商轉里程碑。
自駕車發展可說是未來經濟成長的火車頭,無論是車廠、電信商或半導體廠商皆積極投入其中,期許目標能將自駕車商轉,奪得自駕車第一桶金。為此,相關供應鏈廠商近幾年全力進行自駕車場域測試,且政府單位亦積極制定自駕相關法規政策,期能在自駕車安全上路的時候,法規政策亦能準備就緒,迎向未來解放雙手開車的願景。
2018年年底Waymo推出首款自駕叫車服務Waymo One,並於加州正式上路,正式為自駕車商業化發展樹立新里程碑。恩智浦大中華區汽車電子事業部總監劉芳表示,Waymo在自動駕駛領域裡可以說是起步最早,根據市場數據資料,其於加州路測里程已經超過200萬英里,且人工干預率也是最低的,這也是為什麼該公司能夠最先提供自駕叫車服務。但Waymo One提供的服務是在限定範圍內的,服務的對象也還是針對有限的志願者,而且車上需要配備安全員,在必要時對車輛進行接管和操控,距最高L5等級自動駕駛尚需一段發展時間。當然,這對自動駕駛如何落地,是一個非常有益的嘗試和探索,相信對整個自動駕駛產業會產生非常積極和指導性的影響。
由於自駕車普及化受限於價格問題,亞德諾(ADI)汽車電子事業部策略行銷及業務開發總監Junya Nagai(圖1)談到,從市場落地角度來看,自動駕駛會率先在共用租車、商用車、特種車輛等有限應用場景條件車輛上實現。這些高度重視性能、對成本不敏感的業界市場,將帶動自動駕駛整體市場快速發展,推動技術成熟、硬體成本降低,最後在一般汽車市場得以廣泛應用。
 圖1 ADI汽車電子事業部策略行銷及業務開發總監Junya Nagai表示,自駕將率先實現於有限應用場景的車輛。
圖1 ADI汽車電子事業部策略行銷及業務開發總監Junya Nagai表示,自駕將率先實現於有限應用場景的車輛。
鎖定最後一哩接駁 自駕巴士率先上路
工研院資通所車載資通訊與控制系統組組長蔣村杰(圖2)以一些實際交通案例說明。假使台北市公車服務為12點收班,但仍有些許夜歸乘客有搭乘公車的需求,卻苦無公車可搭。此時若台北市能提供公車深夜時段接駁,不僅能紓緩公車司機夜間行駛的壓力,同時又能服務市民達成雙贏局面。就如同花博期間台中市政府在水湳經貿園區進行為期一個月的自駕巴士試營運方案。
 圖2 工研院資通所車載資通訊與控制系統組組長蔣村杰表示,自駕巴士有助於緩解大眾運輸的壓力。
圖2 工研院資通所車載資通訊與控制系統組組長蔣村杰表示,自駕巴士有助於緩解大眾運輸的壓力。
車輛研究測試中心(ARTC)研發處經理鄧萬鈞(圖3)補充,自駕巴士應用商業模式較為明確,且可運行於特定場域與固定路線,做為最後一哩交通接駁,不僅能提升交通運輸效率與成本,同時能滿足更周全的服務特性。短期而言,大眾運輸不失為一項L4自駕車可先行上路的機會。
 圖3 車輛研究測試中心研發處經理鄧萬鈞認為,短期而言自駕巴士為無人駕駛率先上路的可行方案。
圖3 車輛研究測試中心研發處經理鄧萬鈞認為,短期而言自駕巴士為無人駕駛率先上路的可行方案。
鄧萬鈞談到,該單位一直致力於協助台灣汽車產業發展,除了持續進行前瞻自駕車技術研發外,更透過建構平台車的方式,提供相關供應鏈廠商基於此平台車,進行自我產品的測試與調整,加速其產品量產的時程。舉例來說,ARTC目前正積極投入國產小巴的技術,期能透過架構運行平台的方式,幫助相關產業搶進自駕車商機。
除了自駕巴士之外,隨著自動駕駛設備在工業和智慧農業領域的廣泛應用,例如礦場的自卸卡車、農田中的自動駕駛拖拉機及無人機自動澆灌等,社會公眾對自動駕駛技術的恐懼心會逐漸消散,並逐步認可新技術給出行帶來安全和便利、提升社會效率,不需要太久的時間,就會有越來越多的人樂於接受並踴躍嘗試自動駕駛技術。
自駕車發展已有數年,現今自駕車產業鏈對於自駕車更為認識,並更加了解本身的自我定位價值,使得整體自駕車業發展產生明顯的變化。劉芳將這些變化區分為三大方向。第一,投入廠商對自動駕駛商業應用前景歷程的判斷更加客觀,整體上會更加延長自駕車發展時程,目前量產的汽車更專注於先進駕駛輔助系統(ADAS)技術;第二,自動駕駛迎來了新一輪投資熱潮,但投資將更加集中在創新企業,以及固定園區、物流車、自動駕駛卡車等有機會最先落實的專案上;最後,產業鏈上的各方合作更加的緊密,舉例來說,GM/Cruise/Honda/Softbank、Ford/Argo/VW、Bosch/Conti/NVIDIA/VW、BMW/Daimler、Waymo/Magna,以及百度Apollo合作平台等,都針對自動駕駛達成了各種形式的合作。對於供應鏈廠商來講,如何正確的定位,以充分發揮自己的優勢,聯合產業鏈上其他的夥伴把市場做大,而實現共贏,是值得認真考慮和規畫的問題。
根據麥肯錫近期報告指出,2030年自動駕駛乘用車將達到約800萬輛,自動駕駛技術的實現預計可減少90%以上的事故。Nagai表示,隨著「智慧駕駛」甚至「自動駕駛」由噱頭、加分點,現在逐漸變成標準配備,汽車晶片早已不是單純的硬體產品,而是和軟體、系統以及生態環境緊密相連,這也就為傳統的汽車半導體廠商打開了另外一扇門來提升自己的附加價值。
強調安全性 自駕車冗餘機制不可少
自駕車商用腳步逼近,但其系統設計架構仍處於各自為政的方式。瑞薩車用事業部市場行銷部經理何吉哲(圖4)表示,自駕車設計架構與電腦產業十分不同,電腦大多是微軟與英特爾(Intel)制定產業架構,不過在汽車產業中,每個車廠皆有自定的架構,例如某些汽車大廠,要求不僅須滿足自動駕駛功能,同時更要確保汽車安全性,故主機設計需要採用雙核心與冗餘(Redundancy)機制,當汽車處理器失效時,仍有次系統進行備援,將意外事故風險降到最低。
 圖4 瑞薩車用事業部市場行銷部經理何吉哲表示,對於強調安全的汽車設計而言,建立冗餘機制系統不容或缺。
圖4 瑞薩車用事業部市場行銷部經理何吉哲表示,對於強調安全的汽車設計而言,建立冗餘機制系統不容或缺。
何吉哲談到,傳統汽車大廠於汽車安全的規畫非常嚴謹,車用晶片通過ISO 26262規範是基本必備的選項,就連晶片失效都需要有備援機制,例如汽車引擎控制來自於控制晶片,如何透過備援機制來控制引擎系統,則落實到汽車軟體與硬體晶片上面。
整體而言,投入自駕車產業可分為兩大類型,一種為傳統汽車大廠,採取保守的自駕車規畫藍圖,目前主流量產的自駕車等級多為L2~L2+階段(實質上屬於智慧汽車程度),以提供ADAS功能為主。另一種自駕車投入廠商主要為汽車新創業者,如Google、百度與特斯拉(Tesla)等廠商,一開始投入就以L4~L5為目標。
然而,商業模式主宰著自駕車實際上路的關鍵要素之一。現階段Waymo為了實現L4/L5完全自駕等級標準,堆疊了各式各樣的感測、處理與通訊元件,但車廠是否可能以這樣的方案發布量產車還有待商榷,畢竟目前L4等級以上的自駕車,所必備的光達感測,一顆要價高達上百萬,加上其他元件所打造的一輛自駕車,成本依舊居高不下。
在技術不斷演進下,傳統車廠自駕車發展逐步朝向L3等級前進,而新創業者則是在一連串測試事故與商業模式考量下,將自駕車發展等級降低,從完全無人輔助駕駛的方向,轉向安全駕駛員陪同的情境,其發展也將從上而下,開始布局L3等級的自駕車。換言之,L3可說是傳統車廠與新創業者進入到自駕車領域的關鍵轉折點。
從智慧汽車到自動駕駛,汽車無疑將整合越來越多的感測器。市場調研公司Yole預測,在汽車增量極小的情況下,未來5年汽車感測器出貨量的年平均成長率將達到8%以上。如何融合不同先進感測器,減少通訊損耗,提高回應速度,達到降低成本、提升整體效率是汽車電子供應商的一道大考題。
感測融合/演算法挑大樑 滿足自駕車L3以上效能
劉芳表示,通常車廠或系統廠選擇感測融合方案考量的因素有很多,例如足夠的運算力、對AI演算法的硬體加速、符合車規級別的作業系統、足夠而適合的介面(CAN,Ethernet,PCIe等)、通訊及網路通訊協定的硬體加速等。同時,融合通常與路徑規畫緊密相連,系統需要達到一定等級的功能安全。
NXP可以提供多種支援感測器融合的方案。例如S32V2本身是視覺處理器,內建深度學習加速器(APEX),可同時支援融合多個視覺處理器輸出的感知,實現高精地圖視覺定位及環境建模等功能。再者,S32R系列於2019年將會推出一款新產品可以用作成像雷達訊號處理器,也可以用作雷達網域控制站,融合多路雷達目標級或原始資料輸出,甚至還可以加入視覺處理器的輸出,其擁有線性代數硬體加速單元(LAX),可以用來實現多個感測器融合及AI演算法。此外,S32G做為ADAS域的網域控制站晶片,除了擁有高性能的運算平台,也有低延遲的汽車通訊協定及高頻寬網路通訊協定的硬體加速器,能夠達到ASIL-D等級的功能安全,可以用來實現ADAS域的中央融合功能。
目前自動駕駛還處在非常需要資金投入的階段,生態鏈上的很多企業聯合起來才能共同開發自動駕駛系統,以達到資源極大化的利用和共贏。劉芳指出,NXP的優勢為該公司在自動駕駛領域有完備的產品群組和產品規畫,如負責環境感知的感測器及處理器晶片、融合和路徑規畫的網域控制晶片、控制汽車運作的執行器晶片、負責資料連線的車載網路晶片,以及配套的電源管理晶片等,以提供全面的系統級解決方案;其次,該公司在汽車電子領域有深厚的積累,產品能完全符合車規級、功能安全,以及資訊安全的要求;第三,NXP在自動駕駛方面有大量的研發投入,包括高性能運算、人工智慧、資訊安全等。
相較於其他競爭者,何吉哲談到,瑞薩優勢則在於可提供全方位的控制晶片方案,從影像、油門煞車連動到車身引擎控制皆有相關晶片。舉例來說,RH850系列產品,可提供全球首款跨領域MCU加速汽車ECU整合方案,支援儀表、變頻馬達、車身閘道器、引擎控制與安全氣囊等控制。對於汽車廠商而言,該公司擁有在汽車領域長期累積的經驗,在品質與安全性也有良好的紀錄。
另一方面,從感測器的角度來看,Nagai說明,對於自動駕駛來說,視覺感測器可以實現對交通訊號、指示牌和路標的識別,但光線強弱、雨雪等惡劣天氣等會嚴重影響其識別效果;慣性感測裝置(IMU)不受天氣等外界狀態影響,但降低漂移率、保持長期穩定性是個技術門檻;光達精度更高、成像穩定,然而高昂的成本是其規模化量產的最大挑戰;毫米波雷達是現在熱門的技術,但對特殊材質的反射及穿透力、系統雜訊等都限制其應用範圍;超音波感測器成本低廉,然而目前技術可實現的探測範圍極為有限,難以滿足自動駕駛需求。選擇哪些組合、如何進行融合以形成高性能、低成本、差異化、系統級解決方案,相當考驗方案供應商的商業敏感度和技術實現能力。
Nagai表示,ADI在2017年宣布推出的Drive360技術平台,融合了毫米波雷達、雷射雷達和IMU等產品組合,能可靠地檢測形狀更小、移動速度更快、距離更遠的物體(如摩托車、行人、動物等),在自動駕駛汽車周圍打造一道360度保護屏障,全方位保護汽車和乘員安全。針對感測器融合,ADI將主要進行邊緣運算的研究,致力於在感測器端把訊號處理得更好,為客戶提供更優質、更準確的資料;同時,ADI還將進行駕駛汽車上的感測器組合、搭配方案的研究,儘量優化車載感測器的配置(圖5)。
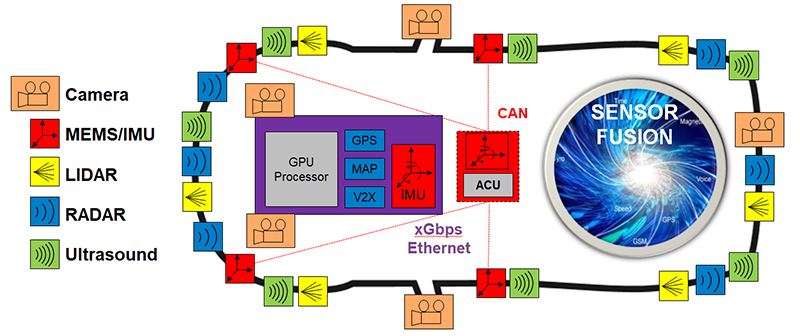 圖5 各類型感測器部署於自駕車四周。
圖5 各類型感測器部署於自駕車四周。
從演算法的角度來看,新馳科技研發處副總經理賴盈霖(圖6)談到,感測融合的原始數據很重要,而這些資訊通常掌握在原廠手中,資料取得有一定的難度;再者,感測融合人才需要具備跨領域技術整合的能力,舉例來說,要將相機與IMU做整合,就需要同時具備AI深度學習專家與機械技術的專家,後續若要再將雷達融合進去,則須要有分析訊號處理能力的人才,針對不同感測器需具備的專業能力也大有不同,可說是隔行如隔山。
 圖6 新馳科技研發處副總經理賴盈霖表示,感測融合最大挑戰在於跨領域人才的整合能力,以及取得感測器的原始數據資料。
圖6 新馳科技研發處副總經理賴盈霖表示,感測融合最大挑戰在於跨領域人才的整合能力,以及取得感測器的原始數據資料。
看準目前主要量產汽車大多為L2~L2+,其對於電腦視覺的需求也較為蓬勃。因此,賴盈霖表示,該公司初期將以開發軟體為主,以整合相機、IMU與GPS等三種類型感測器,提供電腦視覺方案為主。
交通環境/法規大不同 各國自駕車發展先後不一
蔣村杰表示,從L2升級到L3,在技術層面演進似乎腳步較快,但對應的法規與保險等是否到位,以及提供服務背後是否有經濟利益的優勢,才是決定L3進入商用的關鍵點。
實際上來看,L3於已開發的國家的都會區、歐美道路較容易施行,反觀亞洲交通場域,在汽機車混流與交通建設較不先進國家,其挑戰更多,之中尚需全球相關產業的業者相互合作,將AI訓練擴展到更多不同交通環境與不同交通法規規範,才有辦法達到完全成熟境界。
首圖:圖片來源Nuro