在九十二期專欄中已針對全球衛星定位系統(GPS)接收機和手機晶片整合模式進行完整介紹,同時亦剖析類比和數位基頻介面的設計考量;本期專欄將繼續探討GPS與手機晶片整合時,手機電路對GPS接收機的干擾問題。
手機系統對GPS干擾問題重重
GPS接收機和手機整合最容易面臨的問題便是來自手機和主機板的干擾會導致GPS接收機靈敏度(Sensitivity)降低、 值降低以及造成衛星誤判(False Alarm)。一般說來,手機系統對GPS的干擾可以分類為外頻(Out-of-band)和同頻(In-band)干擾。圖1所示為干擾源的樹狀圖。
值降低以及造成衛星誤判(False Alarm)。一般說來,手機系統對GPS的干擾可以分類為外頻(Out-of-band)和同頻(In-band)干擾。圖1所示為干擾源的樹狀圖。
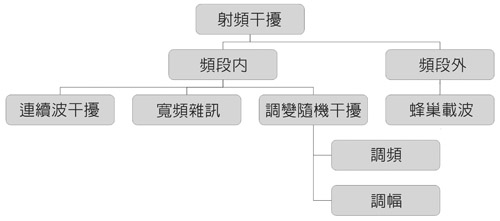 |
| 圖1 GPS接收機干擾源樹狀圖 |
手機射頻為GPS外頻干擾元兇
外頻干擾主要是成因為手機發射機所發射的高功率載波。一般手機的發射功率在全球行動通訊(GSM)頻段最高發射功率可達33dBm,在DCS頻段最高發射功率亦可達30dBm;就平均發射功率而言,手機的發射功率通常在20dBm以上。相較之下,衛星訊號抵達GPS接收機天線的功率在戶外約為-130dBm,而在室內則降低到-150dBm左右。雖然手機所發射的高功率載波落在GPS的外頻,但這兩種訊號的功率位準相差甚大(可達150~180dBm),再加上低雜訊放大器(LNA)本身是一種寬頻的元件,因此會對第一級低雜訊放大器產生非線性效應。此一非線性效應會在GPS接收機內產生訊號飽合(Saturation)、壓縮(Compression)和互調變(Inter-modulation),進而導致GPS接收機值的降低,甚至產生同頻的干擾訊號。
GPS的操作頻率為1,575.42MHz,因此當手機操作在DCS頻段時會對GPS接收機的值造成最大的影響。理論上,當手機操作在DCS頻段的最低頻道(ARFCN為512, =1,710.2MHz)且發射功率亦為最大時(30dBm),會對GPS接收機的值造成最大的負面衝擊。因此,一般要評估手機對GPS接收機所造成的值降低的影響,都會利用上述的無線電組態(Radio Configuration)來評估。
=1,710.2MHz)且發射功率亦為最大時(30dBm),會對GPS接收機的值造成最大的負面衝擊。因此,一般要評估手機對GPS接收機所造成的值降低的影響,都會利用上述的無線電組態(Radio Configuration)來評估。
此外,北美地區的通用行動通訊系統(UMTS)會布建在先進無線服務頻段(Advanced Wireless Service, AWS),AWS頻段的上行頻段為1,710M~1,755MHz,且下行頻段為2,110M~2,155MHz(和UMTS頻段相同)。至於整體封包無線電服務(GPRS)在DCS頻段的最低頻道和UMTS在AWS頻段的最低頻道以最大功率發射對GPS的值影響何者為大,筆者還沒有定見。GPRS的最大發射功率為30dBm,但由於僅使用兩個上行時槽(Time Slot),因此其工作週期(Duty Cycle)僅為25%。相較之下,寬頻分碼多工存取(WCDMA)的最大發射功率雖然較低(24dBm),但其工作週期為100%。
高功率的手機訊號進入GPS LNA的大小會受到下列幾項因素的影響:發射功率、分時多工(TDMA)系統的工作週期、GPS天線和手機天線的隔離,以及GPS射頻前級的表面聲波(SAW)濾波器對手機發射載波頻率的抑制。筆者認為TDMA系統對GPS性能的影響會比WCDMA系統要來得多,因為功率大小才是造成干擾的最主要的原因,至於工作週期的影響是比較輕的。
同頻干擾成因相對複雜
同頻干擾源主要有寬頻雜訊(Wideband Noise)和連續波干擾(Continuous Wave Interference, CWI)兩種不同形式。其中寬頻雜訊的來源主要是GSM載波在外頻的輻射落在GPS的頻帶內所造成,圖2為GSM載波頻率在1,710MHz時頻帶外的輻射落在GPS頻帶內所產生的寬頻雜訊。
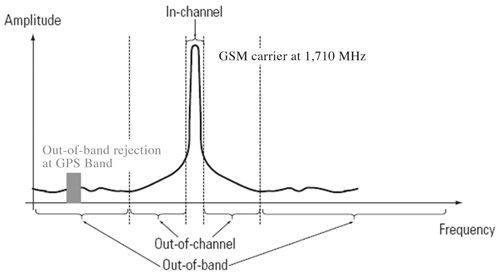 |
| 圖2 GSM載波在頻帶外的輻射對GPS頻帶所產生的寬頻雜訊 |
前述干擾型態實為外頻干擾的延伸,亦即當手機頻段外的輻射干擾落在GPS頻段內時,會對GPS接收機造成同頻干擾。這類干擾無法藉由任何射頻訊號處理手段解決。此外,由於這類雜訊屬於寬頻雜訊,因此會將GPS頻段的雜訊位準提高,進而導致
值的降低。除了這類雜訊干擾之外,GPS接收機
值降低還有以下幾項成因,包含TDMA系統的工作週期、手機收發機內的雙功器(Diplexer)對GPS頻段的抑制效果、手機發射濾波器在GPS頻段的抑制效果、GPS天線和手機天線的隔離等。其中在手機發射濾波器部分,由於TDMA系統的發射時槽和接收時槽會相距三個時槽的時間,因此手機的發射濾波器在設計時通常不會將外頻抑制性能納入考量,使得手機收發器對GPS頻段的干擾難以有效處理。
至於在CWI的部分,又可以分類為純CWI和調變的隨機干擾(Modulated Random Interference, MRI)。CWI雖然會降低GPS的值,但除非是很高功率的CWI,否則對GPS接收機整合設計而言,CWI所造成的降低並不是主要的考量。CWI所造成的主要負面衝擊在於,由於GPS訊號的週期性(Periodicity)和同相積分(Coherent Integration),會使得CWI嚴重地影響到GPS的訊號處理。CWI的來源可以是本地振盪器(LO)的諧波,例如在高通(Qualcomm)的解決方案中,VCTCXO輸出頻率的第八十二次諧波會落在GPS的頻帶內、主機板上面數位時脈的高次諧波,例如液晶面板本身就可能是CWI的主要來源,或行動數位電視接收機的窄頻LO。MRI的定義則是具有調變且在頻譜上展開的CWI訊號,主要的來源是調幅廣播的高次諧波以及記憶體傳輸線中數位時脈的高次諧波。MRI因為具有調變和頻譜展頻的特色,因此對GPS接收機的影響遠不如CWI。
GPS C/A碼是金氏碼的一種,且其週期為1毫秒。因此C/A碼具有線頻譜(Line Spectrum)的特質,如圖3所示。
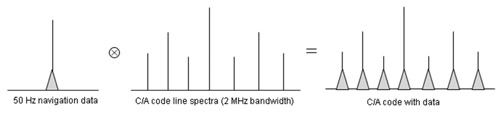 |
| 圖3 在C/A碼頻譜的頻寬內將導航資料展頻 |
不同的偽隨機雜訊碼(PRN)會有不同的線頻譜形狀(Pattern),因此CWI在不同的PRN碼下會有不同的效應,而且這是可以被預測的。最差的頻譜線意味著在這個頻率之下,GPS訊號最容易受到同頻CWI的影響。通常這樣的頻譜線會發生在PRN碼具有最高的功率的線頻譜上面。每一個PRN碼的最差的頻譜線的位置都不會一樣,圖4顯示PRN1的線頻譜,而圖5則顯示PRN1的線頻譜的放大圖。從圖5中可以發現PRN1最差的線頻譜會落在距離GPS中心頻率42,172Hz的位置。
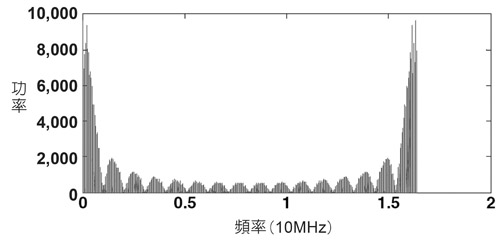 |
| 圖4 PRN1的線頻譜 |
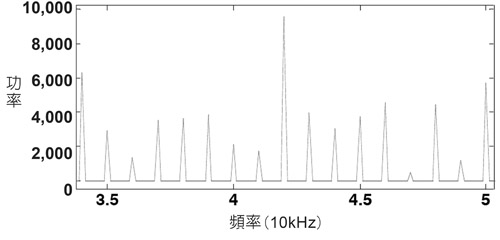 |
| 圖5 PRN1的最差的頻譜線 |
展頻過的資料抵達接收機天線時會存在兩種干擾訊號:寬頻雜訊和窄頻干擾訊號(類似CWI)。接收到的GPS訊號在和本地所產生的PRN碼進行相關運算之後會將CWI分布在每一個線頻譜上(圖6)。
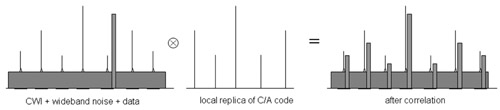 |
| 圖6 在相關運算之後CWI被分布在每一個線頻譜上 |
接收機的解擴展(Despread)就是將接收機本地所產生的PRN碼乘上取樣的訊號,寬頻雜訊會被均勻的散佈頻帶內而CWI則會被複製成線頻譜。只有當干擾訊號(寬頻雜訊和CWI)落入追蹤迴路的低通濾波器的頻寬內時,才會和導航資料一起被濾出(圖7)。
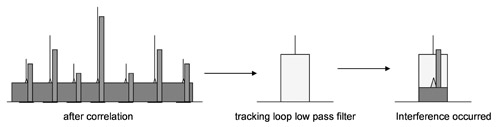 |
| 圖7 干擾訊號落在追蹤迴路的頻寬內時會和導航資料一起被濾出 |
因為都卜勒效應的緣故,不同衛星在不同的時段會受到CWI的影響而導致
的降低。CWI對衛星的
的影響和衛星的都卜勒頻率與PRN碼本身有關。都卜勒變化率會影響到衛星溝槽的寬度,而PRN碼則會決定衛星的受到CWI影響的時段。此外,特定PRN碼的線頻譜和CWI的頻率相同時,CWI亦會影響到
溝槽的深度。
GPS衛星值可以藉由下列公式計算出來:

其中
 :熱雜訊的功率
:熱雜訊的功率
 :雜訊的處理增益(Processing Gain)
:雜訊的處理增益(Processing Gain)
 :訊號的積分時間長度
:訊號的積分時間長度
 :訊號碼相位的位移(以碼片為單位)
:訊號碼相位的位移(以碼片為單位)
 :估算的載波頻率,
:估算的載波頻率,
 :CWI的載波頻率,
:CWI的載波頻率,
 :第j條頻譜線的係數
:第j條頻譜線的係數
 :接收到的C/A碼和接收機所產生相同C/A碼的互相關
:接收到的C/A碼和接收機所產生相同C/A碼的互相關
圖8顯示衛星1在不同的都卜勒頻率下利用公式所計算的。假設CWI的頻率距離GPS頻段中心為14kHz。從圖8中可以發現當CWI和C/A碼的線頻譜一致時會有溝槽產生(當沒有CWI時值應為一常數),溝槽的頻率會落在1kHz的整數倍且不同的頻率下溝槽的深度會不同。
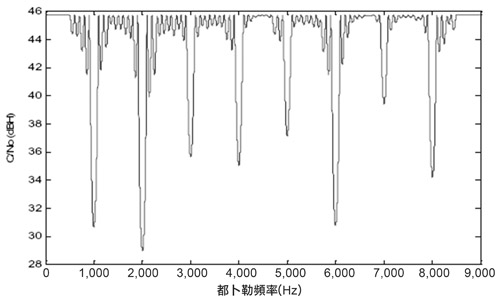 |
| 圖8 衛星1的C/N0值在有CWI時所產生的溝槽 |
在GPS接收機的操作過程中,最害怕的就是接收機受到射頻干擾(Radio Frequency Interference, RFI)。在射頻部分,RFI可能會影響到LNA和自動增益控制(Automatic Gain Control, AGC);在基頻部分,RFI會影響到載波(Carrier)和碼追蹤迴路(Code Tracking Loop)。其干擾的影響輕重程度端視RFI經由射頻和類比中頻/基頻階段訊號處理之後所剩下的能量,輕則影響GPS對衛星訊號的量測,嚴重時甚至會導致衛星訊號脫鎖(Out-of-lock)。在RFI中,CWI是一個會嚴重影響到GPS的C/A碼的因素,這主要是因為C/A碼的訊號頻譜具有許多間距為1kHz的線頻譜,而這些線頻譜最容易受到CWI的影響。
審慎進行設計整合 GPS接收干擾有解
要讓接收機較不會受到CWI的影響的唯一辦法,就是當有CWI掉入GPS頻帶時,接收機能夠偵測到這些CWI訊號並將其影響降至最小。CWI偵測的機制可以放置在GPS接收機相關運算之前或之後,在前面的稱為前相關(Pre-correlation)偵測,而在後面則稱為後相關(Post-correlation)偵測。前相關的偵測是利用天線、自動增益控制器或類比數位轉換器來偵測和描繪CWI。特別是在天線部分,其實可透過使用陣列天線處理的技術來化解CWI干擾的問題,只可惜由於成本考量,商用GPS接收機通常不會採用。
因此,在商用GPS接收機整合的案例中,多半都是採用後相關的技術來偵測CWI的訊號。CWI對GPS接收機所造成的影響主要是降低接收機的、造成衛星誤判、增加首次定位時間(TTFF)、降低定位精準度等。
後相關偵測可解決 降低與衛星蓋台問題
功率較高的CWI會影響到AGC迴路的增益設定,導致衛星訊號更低於雜訊層而降低GPS接收機的最終的值的計算。因為CWI所產生的值的降低只能透過增加類比數位轉換器的位元數來改善,無法透過任何基頻數位訊號處理的技術解決。GPS訊號在解相關運算之前,會埋在熱雜訊層之下,因此AGC迴路增益控制的設定點(Set Point)會設在中頻或基頻的訊號功率。AGC迴路基於所接收到的訊號功率來自動調整中頻或基頻增益的大小。當GPS頻段有CWI存在時會影響到AGC迴路的設定點導致較小的中頻或基頻增益加在GPS訊號上面,導致GPS訊號更遠離熱雜訊層因而降低最終的值。當CWI的功率位準高於熱雜訊層時,值的降低會變的很明顯。
衛星誤判的問題的解答則相對單純些。一般來說,GPS晶片業者會利用CWI將可視衛星蓋台作為量測準則,來提供CWI的遮幕(Mask)給系統設計商。系統設計商的硬體工程師只要確保主機板上面的CWI功率不會超過此CWI遮幕即可,越高的CWI遮幕值越能減輕主機板電磁干擾(EMI)除錯的壓力。在追蹤模式(Tracking Mode)時,GPS接收機的量測引擎(Measurement Engine, ME)可以很輕易的得知此時使用者天空上可視的衛星有哪些,因此衛星誤判可以輕易的利用後相關偵測來檢驗碼域頻域上的峰值訊號,並判斷哪些是真實的衛星訊號,而哪些只是CWI所造成的假訊號。在追蹤模式時的假訊號並不會造成GPS接收機性能的下降,只要CWI不會將可視衛星的數目蓋掉太多,位置引擎(Position Engine, PE)還是可以輕易的計算出位置。更精確的做法就是ME可以準確的偵測CWI,使得(NMEA)的序列不會輸出不應該存在的衛星的資訊。
量測引擎良窳決定首次定位時間
首次定位時間受CWI影響的程度會和CWI的屬性(單頻或多頻)、CWI的功率(高過熱雜訊層多少dB)、CWI的頻率、PRN碼的線頻譜、GPS接收機的操作狀態和使用者的使用模式(User Scenario)密切相關。當GPS接收機是處於冷開機(Cold Start)或遠距開機(Far Start)時,若GPS頻段存在高功率的CWI時,其所受到的影響會相當嚴重。在這兩種操作模式之下,ME無法得知天空中可視的衛星有哪些,在解相關(De-correlation)運算之後,CWI的行為會和真實衛星在解相關運算之後的行為很類似(在二維搜尋空間皆會存在峰值),而導致ME會將CWI誤判為真實衛星,並進行後續追蹤(計算偽距離)和嘗試解碼(導航訊息的解碼)等動作,進而增加TTFF時間。
一般來說在進行衛星資料的解碼程序時,ME很快就可以發現所要嘗試解碼的訊號不是真實的衛星訊號,而是一個干擾訊號(Jamming Signal)。一旦發生這種情況,便會放棄在此都卜勒頻率(Doppler Frequency)的衛星訊號的擷取而移至下一個可能的頻率槽(Frequency Bin)。在此種接收狀態和使用模式之下,TTFF的影響程度會和GPS ME對CWI判別的能力和偵測的速度有關。最壞的情況是當高功率的CWI影響到ME對雜訊層的計算,以及高功率的CWI加上雜訊層經過解相關運算後,超過ME所設定的衛星訊號峰值偵測的臨界值時,雜訊層上的所有隨機雜訊都會被ME視為是真實的衛星訊號,而嘗試去追蹤和解碼,進而導致ME陷入無窮盡的錯誤擷取(False Acquisition)狀態。在暖開機(Warm Start)時,ME可以利用最後一次的定位資訊和存放在非揮發性記憶體(NVRAM)的衛星星曆(Almanac)和時間資訊計算出此時天空可視的衛星有哪些,以及相關衛星大約的都卜勒頻率,ME可以利用可視衛星和相關的都卜勒頻率的資訊來輔助CWI的偵測。
此外,當CWI的功率超過臨界值時,也會產生錯誤擷取的情況而導致大幅度的增加TTFF(和冷開機以及遠距開機的情況類似)。另外一種常見的使用情況是假設用戶的個人導航設備(PND)放置在車上,且車子停放於地下停車場。隔天當使用者發動汽車並打開PND時,PND內的GPS接收機會開始進行衛星訊號的擷取,但此時因為車子還是在地下室所以不會有任何的衛星訊號存在於二維(頻域和碼域)搜尋空間。在打開PND的同時,主機板本身所產生的CWI就已經開始影響GPS接收機對衛星訊號的擷取,導致ME試著要去對CWI進行衛星訊號的解碼。當汽車緩慢的駛離地下室時來到戶外的環境中在二維的搜尋空間才會存在衛星訊號的峰值。在這種使用環境中,TTFF的影響會隨著CWI功率的增加而大幅度的增加,直到超過特定的臨界值時,就算是在強訊號區也無法擷取到衛星的訊號。
值得注意的是,連續性的CWI也可能會影響到GPS接收機的定位精準度,特別是當可視的衛星數不多時(低於五顆)。當某顆衛星的C/A碼的線頻譜和CWI的頻率相同時,該顆衛星的值會有一段時間是位在極低的值,或甚至脫鎖。此時GPS接收機的定位精準度有可能會受到影響,如圖9所示。良好的卡爾曼濾波器(Kalman Filtering)設計可以降低因為CWI所產生的位置漂移的現象。
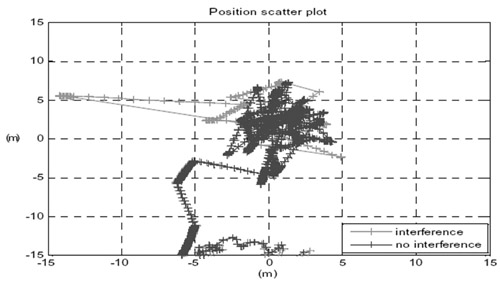 |
| 圖9 GPS接收機連續定位點的輸出受到CWI的影響 |
GPS干擾千頭萬緒 設計團隊宜謹慎因應
本文簡單地分析了各種在手機設計中整合GPS接收機所可能面臨的干擾問題,其中有些干擾來源只要在設計整合時多加留心就可避免,有些甚至透過原廠所提供的參考資訊即可輕鬆排除,但亦有更多干擾問題是必須小心因應的。在手機中整合GPS接收功能已經是未來的大勢所趨,手機系統整合設計團隊宜對GPS接收機干擾問題預做研究,以因應即將到來的設計挑戰。