除了北美以外,歐盟、俄羅斯等地的全球導航衛星系統即將上線,在在刺激了業界對定位導航服務的需求。然而,為提升導航系統的精準度與效能,就需要其他資料的協助,因此也延伸出輔助式全球導航衛星系統的問世。
隨著北美全球衛星定位系統(GPS)、歐盟伽利略(Galileo)與俄羅斯的全球導航衛星系統(Global Navigation System, GLONASS)逐步更新與建置,全球導航衛星系統(Global Navigation Satellite System, GNSS)的存在也更為人所知。而輔助式全球衛星定位系統(AGPS)的出現,更顯著地改善了內建手機內接收器的性能,也同樣刺激手機內建GNSS接收器和定位服務(LBS)的需求,使得業界預估在2011年,會有超過30%的手持式裝置內建GNSS接收器。定位服務和導航應用的蓬勃發展,也意味著AGPS及其相關的輔助服務將快速成長。
在未來,手機內建的GNSS接收器,將不再局限於傳統GPS接收器,有可能是GPS加伽利略的雙模接收器,或是GPS接收器加上太空衛星增加系統(Satellite Based Augmentation System, SBAS)接收器,如廣域增強系統(Wide Area Augmentation System, WAAS)或歐洲同步衛星導航覆蓋服務(Euro Geostationary Navigation Overlay Service, EGNOS)等。因此傳統的AGPS的觀念已經不符潮流所趨,而延伸至廣義的輔助式全球導航衛星系統(AGNSS)。
輔助資料來源廣泛 AGPS靈敏度大幅提升
傳統GPS接收器需要至少30秒的時間來接收衛星廣播的導航訊息(Navigation Message),然在AGPS中,GPS接收器並不須要進行實際的接收和解碼這些訊息,而是由基地台解碼並透過行動網路傳遞至GPS接收器。利用這種機制,可以將首次定位時間(TTFF)降至18秒內,有助於緊急定位和其他新興應用。再者,在惡劣環境中,因為毋須解碼導航訊息,所以接收器的靈敏度可以大幅提升以應付外在環境之考驗,也讓AGPS接收器成為提供定位和導航服務的唯一選擇。
截至目前為止,所有的輔助資料都是針對GPS L1接收器。一般GPS接收器可以透過兩個管道取得輔助資訊:第一個管道是經由行動網路,也就是由行動電話業者所提供,並將輔助資訊存放在行動網路的定位伺服器內;第二個管道則是經由網際網路--無論是乙太網路(Ethernet)、無線區域網路(WiFi)或行動網路連結到GPS晶片業者的伺服器去擷取輔助資料。
即時衛星星曆效能高
由行動電話業者所提供的輔助資料,屬於即時衛星星曆內容(Broadcasting Ephemeris),而晶片業者所提供的輔助資料,一般都是預測的星曆內容(Predicted Ephemeris)。目前大部分的GPS晶片業者大都可以提供有效期7天的衛星軌道資料預測。至於要提供精準的軌道資料預測,則必須仰賴全球參考網路建置(Worldwide Reference Network, WWRN)(圖1)。
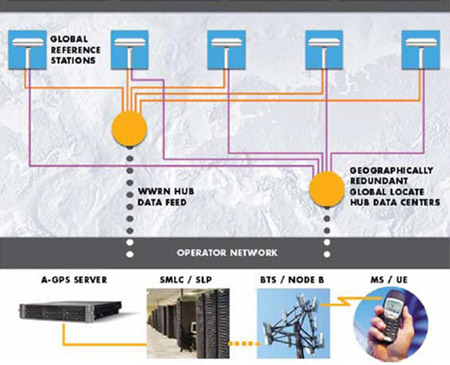 |
| 圖1 博通AGPS全球參考網路示意圖 |
利用WWRN所蒐集到的衛星星曆內容,會被集中到AGPS伺服器中,並針對每顆衛星進行長期軌道資料預測。以目前的技術而言,長期軌道(Long Term Orbit, LTO)資料的精準度,在前3天大致上還可以維持在一定的程度之內,第三天以後定位的精準度會明顯變差。目前各公司的解決方案大都可以維持7天,目前努力的方向就是將有效期從7天延伸至10天。
有別於電信業者提供的即時內容,利用遠端伺服器所提供的衛星軌道資料是屬於預測的資料,理論上利用衛星廣播的即時衛星星曆內容,進行的首次定位時間會比伺服器的軌道預測資料來得快。
根據實測經驗,在一般的環境中,利用廣播星曆內容的首次定位時間大約為18秒;利用伺服器所提供的軌道預測資料的首次定位時間則約為30秒(包含TCP/IP的連線建置時間)。目前利用遠端伺服器來輔助定位的方法稱為以伺服器為基礎的AGPS(Server-based AGPS),例如瑟孚(SiRF)的InstantFix、博通(Broadcom)的LTO和高通(Qualcomm)的XTRA伺服器。
SAGPS立基衛星軌道引力模型
另一種輔助方式,是將預測衛星軌道的應用程式,從遠端AGPS伺服器移到手機的應用處理器(Application Processor)中,此種方法又被稱為自我輔助AGPS(Self-assisted AGPS, SAGPS)。博通將此種技術稱為On-board LTO;瑟孚則將此技術稱為InstantFix2。
SAGPS主要是利用衛星軌道引力模型(SV Orbit Prediction Force Model)來預測衛星軌道。由於GPS衛星的軌道會受到月球、太陽和其他近地行星的引力影響,因而產生攝動(Fluctuation)現象。故衛星軌道預測引力模型主要是預測因為上述引力對GPS衛星所產生的攝動,進而預測衛星的位置。有別於以伺服器為基礎的AGPS,衛星軌道預測引力模型是架構在應用處理器上,且至少要為ARM9或以上的等級。
各國陸續訂定 AGNSS發展多元
也因為輔助式資料的重要性升溫,也在各系統中帶來些許不同。如在GSM部分,輔助資訊是被定義在無限資源定位通訊協定(Radio Resource Location Protocol, RRLP)中;在UMTS,輔助資訊則是被定義在無限資源管理(Radio Resource Management, RRC);在CDMA2000,輔助資訊則定義在IS-801中。
不論是RRLP或RRC,都屬於控制面(Control Plane),在用戶面(User Plane)部分,開放式移動聯盟(Open Mobility Alliance, OMA)定義了安全用戶平面的定位(Secure User Plane Location, SUPL)。基本上,SUPL和RRLP/RRC所規範的輔助資訊是相同的,唯一的差別是OMA SUPL是規範在封包交換網路上,如利用GPRS的資料頻道;而RRLP/RRC則是規範在電路交換的網路上。SUPL 1.0的系統架構如圖2。
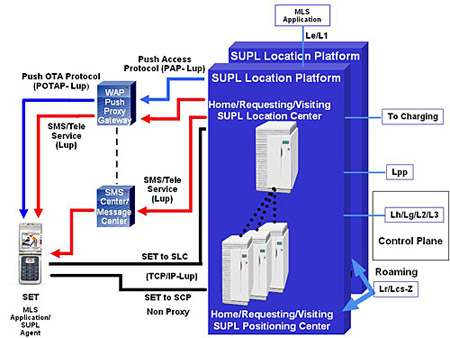 |
| 圖2 SUPL 1.0的系統架構 |
在2006年秋天,3GPP納入新增的GPS頻帶和其他GNSS系統的輔助標準。此項建議主要是納入包含GLONASS、伽利略系統和其他基於空間的增強系統(SBAS),如日本的準天頂衛星系統(Quasi-Zenith Satellite System, QZSS)、美國的WASS和歐洲的EGNOS等。圖3所示為各種GNSS開始提供服務和升級的時程表。各種SBAS系統的服務區域如圖4。
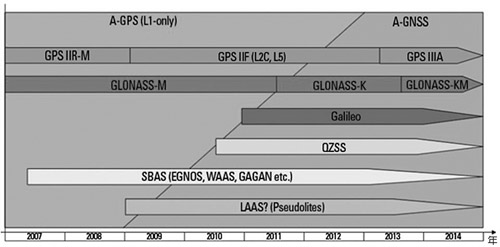 |
| 圖3 各種GNSS開始提供服務和升級的時程表 |
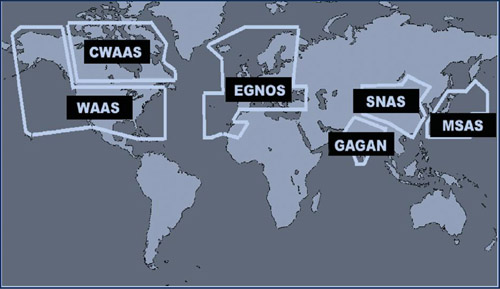 |
| 圖4 各種SBAS系統的服務區域 |
從圖3可以發現,截至目前為止,只有兩套GNSS和一套SBAS已提供服務,也就是美國的GPS和WAAS,以及俄羅斯的GLONASS。這些系統藉由增加新的頻段和更新衛星來進行升級的計畫也正在進行當中。泛歐伽利略系統目前也正展開部署,預計在2013年初就可以提供服務。還有另一個發展中的計畫,就是區域增強系統(Local Area Augmentation System, LAAS),也就是俗稱的偽衛星(Pseudolite)。
GNSS輔助資料標準正式確定
有兩種輔助資料的版本建議在3GPP內互相競爭,主要的差異在於如何將新系統帶入標準內。第一項提議是以一次一個系統的方式加入標準內,第二項提議是採用更一般化的方法,將目前已知的系統和未來可能的系統納入標準中,第二項提議也包含了對GNSS接收器的性能改善,例如改善載波相位的量測、延伸軌道預測的精確度和導入非原始的 導航模型(Non-native Navigation Model)。
3GPP最終採用第二項提議作為新增的GNSS系統輔助資料的標準。為了對各種GNSS系統提供輔助,也就需要一個一般式的導航模型來提供各種GNSS系統的輔助。此導航模型須能等化各種不同GNSS系統,以支援雙模系統的平滑使用,如GPS/伽利略雙模接收器。
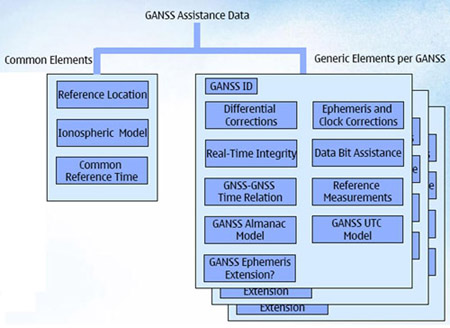
A-GNSS的輔助資料是由共同元素(Common Elements)和每個GNSS系統的一般元素(Generic Elements)所構成。
共同元素包含:參考位置、電離層模型和共同參考時間;一般元素則包含GNSS的識別碼、差動修正(Differential Corrections)、即時完整性(Real Time Integrity)、GNSS間的時間關係、GNSS的星曆模型、星曆內容和時鐘修正、資料位元輔助、GNSS星曆內容的延伸、參考量測和GNSS UTC模型等。A-GNSS輔助資料結構如圖5。
 |
| 圖5 A-GNSS的資料結構 |
由諾基亞(Nokia)、西門子(Siemens Networks)、摩托羅拉(Motorola)和Global Locate(已於2006年被博通所購併)所簽署的變更請求(Change Request, CR),GP-062407號已經在TSG GERAN #32會議被GERAN所接受。這個變更請求對各種不同的GNSS系統使用一般化的輔助資料,因此也已經在2006年11月被3GPP所批准並納入3GPP標準44.301。
截至目前為止,A-GNSS輔助資料的標準化已經被GSM(3GPP GERAN Rel7)、WCDMA(3GPP RAN Rel 7)、OMA SUPL2.0等行動通訊標準所批准。
至於A-GNSS下一階段的目標,則為藉由增加新的特色將標準化的A-GNSS推向更有競爭力和吸引力,同時將A-GNSS的解決方案延伸至WiMAX、3GPP LTE和WLAN,且隨著新GNSS系統的啟用讓電信業者廣泛的參與並提供新的服務給消費者,說服更多GPS接收器造商投入生產GNSS接收器以擴大整個GNSS市場,以及將GNSS、A-GNSS和非GNSS技術進行整合,以早日實現室內定位。
一般化導航模型支援GNSS混合使用
為了對各種不同的GNSS系統提供輔助,需要一個一般化的導航模型,且須能等化各種不同GNSS系統的性能,以支援不同GNSS系統的混合使用。根據定義,此一般化的導航模型是由軌道和包含群延遲(Group Delay)參數的時鐘模型所組成。還有其他的一些基本參數也會被轉換成標準的輔助資料流,不過本文主要聚焦在軌道和時鐘模型的轉換,其他的基本參數不在討論範圍之內。A-GNSS系統的示意圖如圖6。
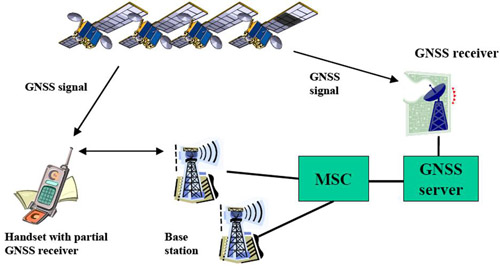 |
| 圖6 A-GNSS系統的示意圖 |
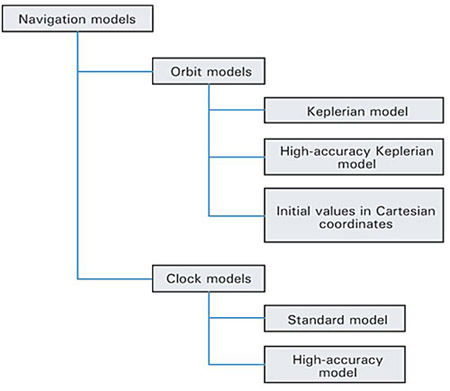
導航模型是由軌道模型和時鐘模型所組成。在軌道模型方面,如果以衛星所廣播的軌道參數來分類,目前的GNSS可以分為第一群組和第二群組。
第一群組使用克卜勒參數(Keplerian Parameter),第二群組則是採用位置、速度和加速度的座標,即卡氏座標。使用克卜勒參數的第一群組又可以被細分為兩個子群組:第一子群組就是大家廣為熟悉的GPS和伽利略系統;第二子群組則是現代化的GPS和QZSS系統。
兩個子群組間的差異就是高精確度(High Accuracy, HA)克卜勒參數的使用,第一子群組使用傳統的克卜勒參數,而第二子群組則是使用高精確度的克卜勒參數。在時鐘模型(Clock Model)方面又可以分類為標準模型和高精度模型。各種GNSS和SBAS所使用的導航模型如圖7。以下介紹此二群組的特性。
 |
| 圖7 多模式的導航模型—不同的GNSS和SBAS系統會使用不同的軌道和時鐘模型 |
|
|
| |
使用在現代化GPS的高精度克卜勒參數,比起傳統克卜勒參數具有較高的解析度。為了捕捉短暫的變化,HA軌道模型會將傳統克卜勒軌道的一些參數進行微分。傳統GPS和現代化GPS就是例用高精確度刻卜勒參數來區別。
基本上,日本QZSS系統所使用的格式,類似於使用在現代化GPS的格式,但是還是有一些小差異,因此在作格式轉換時也必須將這些小細節列入考量。 由於HA克卜勒模型具有較高的解析度,因此利用克卜勒模型所表示的軌道資料也可以用高精度克卜勒格式來表示。HA模型包含時間相關的修正項,因此HA模型多半可將軌道描述的更為精確。
在傾角以及傾角的變化率上面,HA模型使用較高的解析度,因此無法用直接的方法將克卜勒模型映射到HA模型。然在不增加位元數的前提之下,藉由增加傾角的諧波修正項的解析度,可以將克卜勒模型映射至HA模型。因此在GPS/伽利略系統中所使用的諧波修正項的範圍,會大於使用在HA克卜勒模型中的諧波修正項的範圍,在作映射時也必須將這項因數列入考慮。
此外,與軌道模型不同的是,使用在GPS/伽利略系統的標準時鐘模型,並不是HA時鐘模型的子集合。HA的時鐘模型無法表示GPS和伽利略所使用的標準時鐘模型,這主要是因為使用在現代化GPS系統上的時鐘,具有較佳的穩定度,所以必須使用高解析度的時鐘模型。
一般來說,克卜勒軌道模型被認為可以映射至HA軌道模型,並將使用在克卜勒軌道模型的參數重新用HA軌道模型的參數來表示,就可以簡化成單一的GNSS輔助資料格式。然而,這在實務上卻不可行。這主要是因為過高的位元消耗(Bit Consumption),會影響這項作法的實現。如克卜勒軌道參數的位元消耗為342位元,而HA軌道參數的位元消耗則是410位元,就位元消耗來說,HA比克卜勒參數高20%。
不過,如果使用全新的時鐘模型來涵蓋標準和HA時鐘模型,似乎是一條可行的路,但是卻也同樣會付出較高的位元消耗。
|
|
|
| |
GLONASS、SBAS和LAAS所使用的軌道參數,是基於卡氏座標系統,在給定的某一時間上,利用衛星的位置、速度和加速度的資訊來表示衛星軌道。GLONASS是使用俄羅斯的PZ-90座標系統,使用簡單的線性轉換就可以將PZ-90座標系統轉換為GPS所使用的WGS-84座標系統。而GPS和GLONSS的雙模接收器就必須有能力處理兩種座標系統間的轉換,在提供GNSS接收器輔助資訊時,也必須考量到不同的座標系統。
標準時鐘模型具有適當的範圍和解析度,因此使用在GLONASS的時鐘模型,也可以用GPS/伽利略的標準時鐘模型來描述。在GLONASS系統中,並不需要二階時間加速項,因此標準時鐘模型的二階時間加速項反是選擇性的存在,如在GPS/伽利略系統中,此項目會被保留;而在GLONASS系統中,此項目會被移除。利用這種選擇性的存在方式,可以增加在GLONASS系統中位元消耗的效率。
WAAS和EGNOS衛星的位置是使用GPS相容的ECEF座標系統來描述。使用在WAAS和EGNOS的時鐘模型,可以容易的使用標準時鐘模型來描述。值得注意的是,任何一個SBAS系統皆未使用群延遲參數。
比較GLONASS和SBAS系統所使用的導航模型可以發現它們之間的交集並不多。例如可以利用SBAS模型來表示GLONASS衛星的X和Y軸的位置,但卻無法表示Z軸的位置,這主要是因為SBAS衛星是位在地球的同步軌道上。另一方面,在速度座標和加速度座標上,SBAS和GLONASS導航模型也有很大的差異。
|
多模式導航模型獨立選取軌道/時鐘模型
經由上述對各種不同的導航模型和時鐘模型的介紹之後,可以發現,在AGNSS的輔助資料中,軌道和時鐘的模型必須解耦合(Decouple)。在目前的AGPS裝置中只有一種軌道模型(克卜勒)和一種時鐘模型(標準模型),在引入GLONASS系統之後會出現兩種軌道模型(克卜勒和卡氏)以及一種時鐘模型。
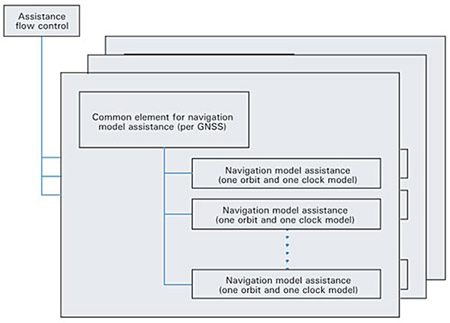
在AGNSS的多模式導航模型(Multi-mode Navigation Model)中,軌道模型並不會和時鐘模型綁在一起,而是依照手機所建置的GNSS和SBAS系統獨立的選取。圖8解釋了多模式導航模型的架構。
 |
| 圖8 多模式導航模型的輔助架構 |
從圖7所示的多模式導航模型的架構中可以發現,每一個GNSS/SBAS系統的輔助資訊,都是由包含共同元素的訊息(和所使用的GNSS/SBAS系統無關)與導航模型(和所使用的GNSS/SBAS系統有關)所組成。
共同元素有助節省位元
利用共同元素訊息,可以將每一種GNSS/SBAS系統相同的一些資料區塊或部分資料區塊,從導航模型搬遷至共同元素訊息。因為相同的資料不會在導航模型中重新傳送,利用共同元素訊息可以節省位元。在克卜勒模型中的偏心量(Eccentricity)和軌道半長軸(Semi-major Axis)這兩種參數,便可以利用共同元素來降低位元消耗。反之,卡氏座標和HA克卜勒模型則無法透過共同元素訊息來達到位元消耗的降低。以下解釋為何克卜勒模型的偏心量和軌道半長軸可以降低位元消耗量。
|
|
| |
歐洲太空局指定伽利略衛星的軌道偏心量為0.002,GPS衛星偏心量的最大值為0.03。儘管如此,偏心量是以32位元和的2-33比例因子(Scale Factor)來表示;因此它能表示的範圍是[0 0.5]。實際的偏心量只占據了[0 0.5]空間的一小部分,所以我們可以將偏心量的數位表示切成兩部分:eMSB代表偏心量的最高有效位元(Most Significant Bits, MSB)、eLSB代表偏心量最低有效位元(Least Significant Bits, LSB)。eMSB具有4個位元,且比例因子為2-5,因此它所能表示的範圍是[0 0.46875]。eLSB具有28個位元且比例因子為2-33,因此它所能表示的範圍是[0 0.03125]。eMSB加上eLSB可以完全涵蓋原始偏心量的表示。若將eMSB的4個位元移到共同元素去,便可節省4個位元。
|
|
|
| |
半長軸的平方根是以無符號(Unsigned)的32位元和2-19m1/2的比例因子來表示。伽利略和GPS衛星的半長軸軌道分別為29,601,000和26,559,710公尺。GPS衛星的半長軸的變化量(ΔA)為±65公里,伽利略衛星的變化量也接近±65公里。可將半長軸的位元表示式切成兩部分:A1/2MSB和A1/2LSB。A1/2MSB具有6個位元且比例因子為2-7m1/2,因此它可以表示的範圍是[0 8064]。A1/2LSB具有26個位元且比例因子為2-19m1/2,因此它可表示的範圍是[0 127.999]。若將A1/2MSB的6個位元移到共同元素,便可節省6個位元。
在克卜勒軌道模型下可以將4個位元的偏心量eMSB和6個位元的半長軸 MSB搬遷至共同元素,因此總共可以節省10個位元。表1顯示了在圖8中的共同元素。
共同元素只適用於使用克卜勒模型的偏心量和半長軸平方根的MSB,使用其它軌道模型的MSB則未包含在共同元素中。因此在Inclusion欄位中的旗標被設為C,代表著有條件的適用。表1 A-GNSS輔助資料的共同元素部分
|
每衛星元素提供關鍵資訊
對每顆衛星來說,每個衛星的元素(Per Satellite Element)都是特有的,它包含衛星的特定資訊,如衛星識別碼,或在GLONASS系統中的頻道、軌道資訊和時鐘模型。此外,它也包含了其它衛星特定的模型,如軌道和時鐘模型的退化模型。表2和表3分別列出不同的軌道和時鐘模型。表4、表5和表6分別為模式1、模式2和模式3的軌道模型。
| 表2 軌道模型 |
| 模式 |
軌道模型 |
| 1 |
GPS/伽利略系統的克卜勒軌道模型 |
| 2 |
GLONASS、SBAS和LAAS的卡氏座標系統 |
| 3 |
現代化GPS和QZSS的高精度克卜勒軌道模型 |
表3 時鐘模型 |
| 模式 |
時鐘模型 |
| 1 |
標準時鐘模型 – GPS、Galileo、GLONASS、SBAS和LAAS |
| 2 |
高精度時鐘模型 – 現代化GPS和QZSS |
從表4中可以發現,此模型是直接從GPS的介面控制文件(Interface Control Document, ICD)中節錄出來。其中偏心量和半長軸平方根的MSB已經被移至共同元素的訊息部分。衛星特定的LSB則是配置在模式1的資料區塊中。旗標C表示此資料區塊會和所選定的導航模型模式有關,假如選定模式1,則定義在模式1中的所有資料區塊都必須存在。
在模式2中,位置、速度和加速度座標的MSB都有條件存在的。因此在GLONASS系統中,除了位置的LSB之外,其他資訊也都必須有條件存在。至於在LAAS系統中,由於並不需要速度和加速度座標,因此當使用LAAS時,這些資料區塊都是選擇性的(Optional)。另外,SBAS系統則必須使用表5中的所有資料區塊。
在模式3中,所有的資料區塊都是有條件存在的。這主要是因為模式3是現代化的GPS所使用的高精度克卜勒模型,因此沒有任何資料區塊是選擇性的。
在時鐘模型方面,表7顯示了兩種可能的時鐘模型,也顯示出多模式導航模型在時鐘模型上面的強處,因為只需要兩個時鐘模型便可涵蓋所有的GNSS和SBAS系統,因而大幅降低複雜度。
值得注意的是,在模式1中,只有第零階和第一階項是有條件存在,而第二階和群延遲項則是屬於選擇性的。這主要是因為SBAS系統並不需要第二階和群延遲項。對模式2而言,因為這些參數在每個例子中都是需要的,因此時鐘模型項和群延遲參數都是有條件存在,但是不同訊號之間的群延遲項會和接收器的能力有關,因此屬於選擇性。